
Ambiente de trabalho
Bin PIcking BrainTech1

Bin PIcking BrainTech2

Bin Picking - Dynamis1

Bin Picking - Dynamis2

Bin Picking - Dynamis3

Bin Picking - Dynamis4

Bin Picking - Dynamis5

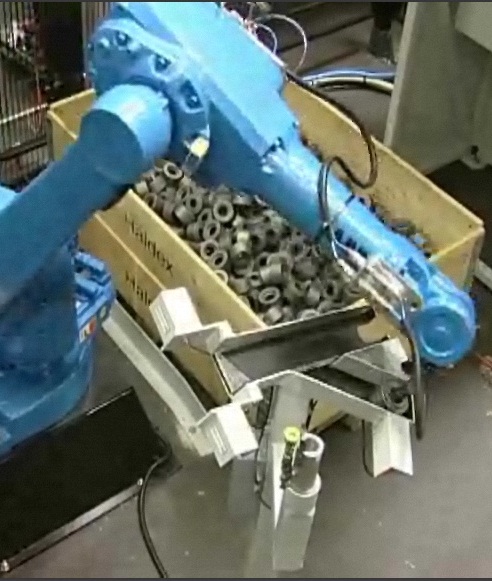
Bin Picking Fanuc1

Bin Picking Fanuc2

Camara TOF
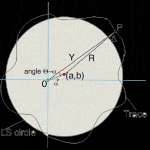
Circularidade

Consola TP
Consola TP

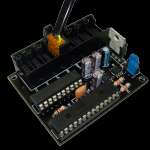
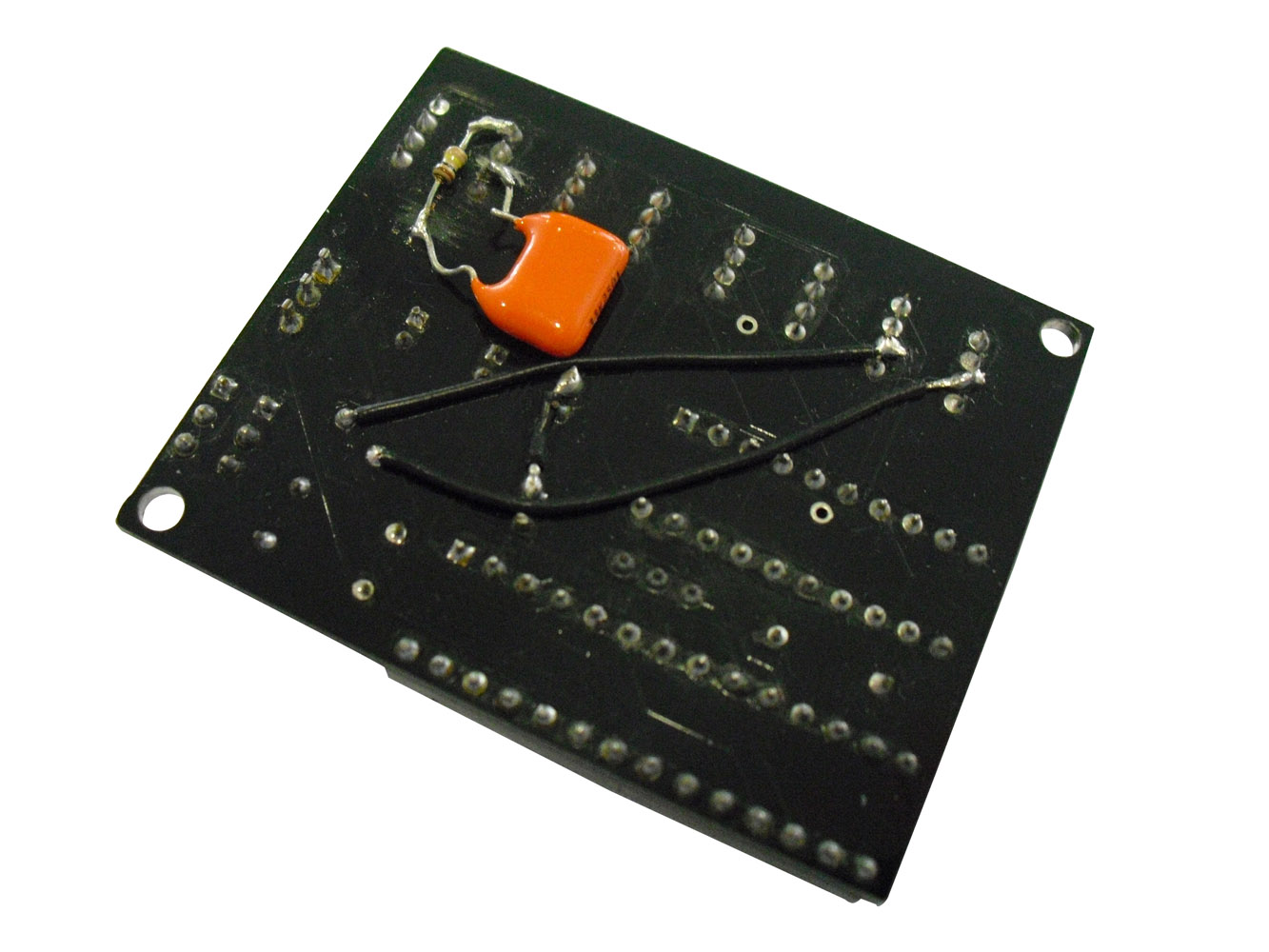
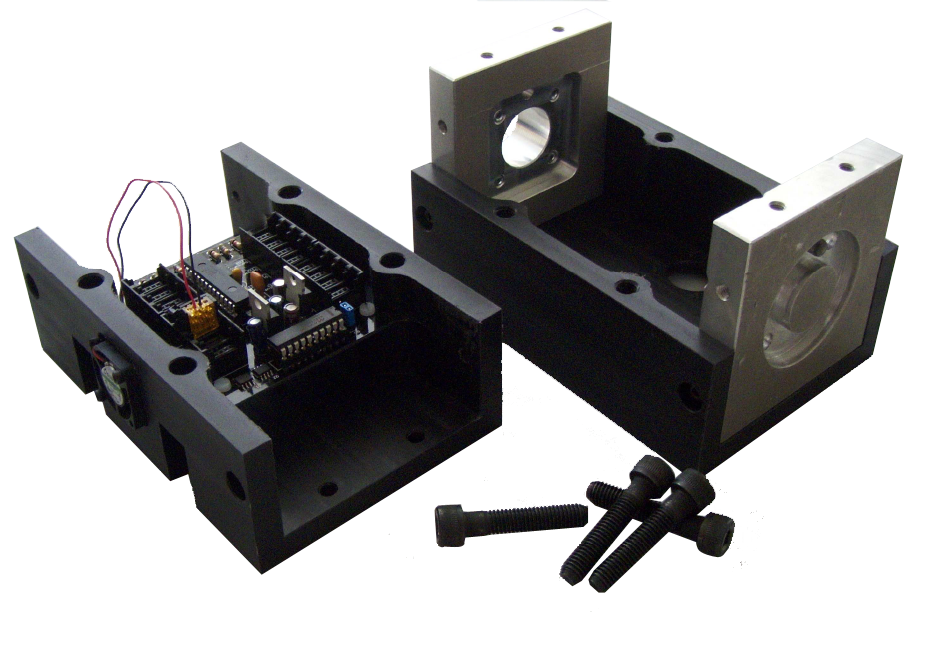
Controlador
Controlador

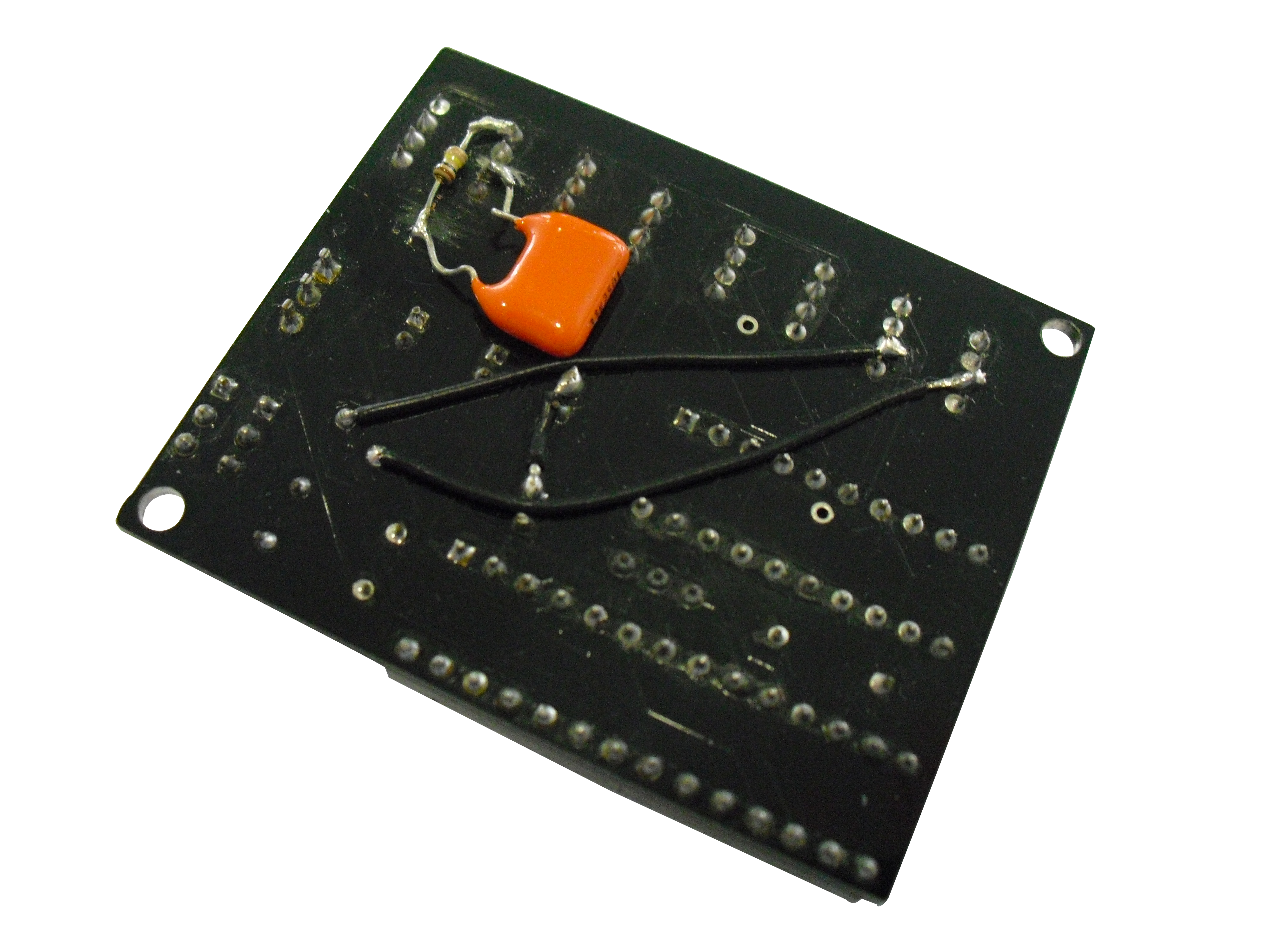
Controlador_2

Câmara e anel de leds

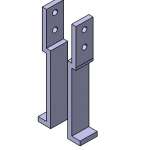
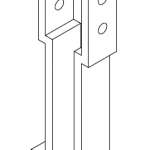
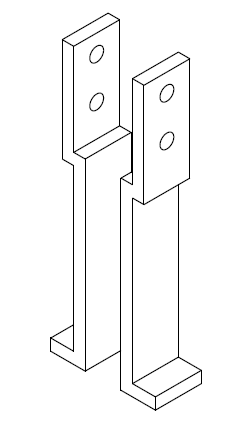
Fixação do sensor
Fixação do sensor
Fixação do sensor

Funcionamento do programa de controlo
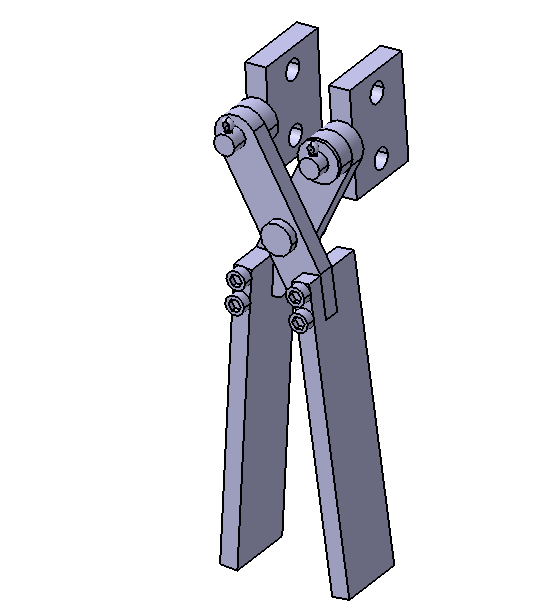
Garra
Garra
Garra_nova

Hokuyo URG-04LX Laser
Implementacao do filtro
Implementacao do filtro

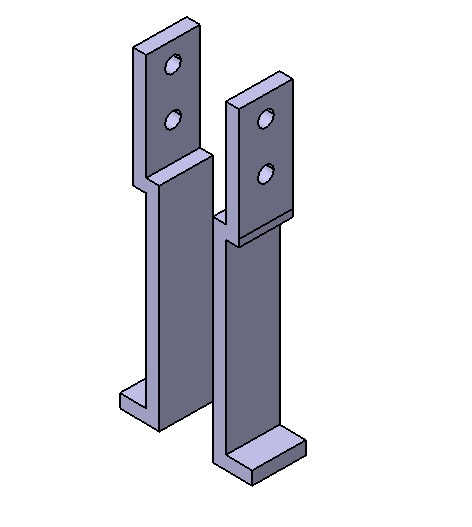
Nova garra
Nova garra

PORTTI~1

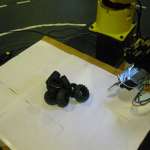
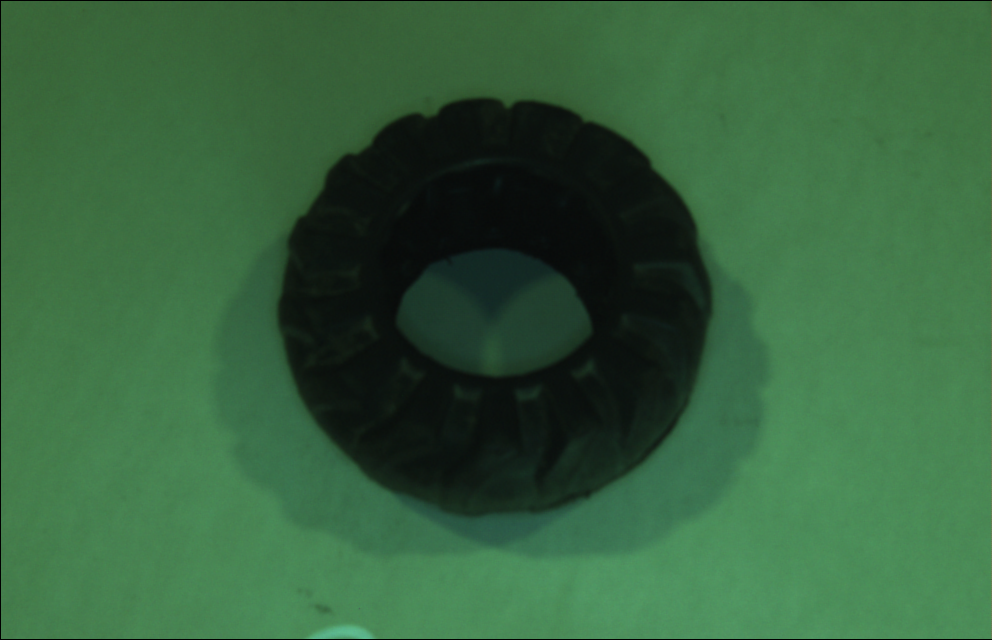
Pneu tipo I
Pneu tipo I

Pneu tipo II
Pneu tipo II

Pneu tipo III
Pneu tipo III

Pneu3
Pneu3

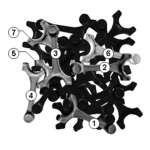
Pneus sobrepostos
Pneus sobrepostos

Pneus sobrepostos2
Pneus sobrepostos2

Pneus

RECIPNEU_1

RECIPNEU_2

RECIPNEU_3

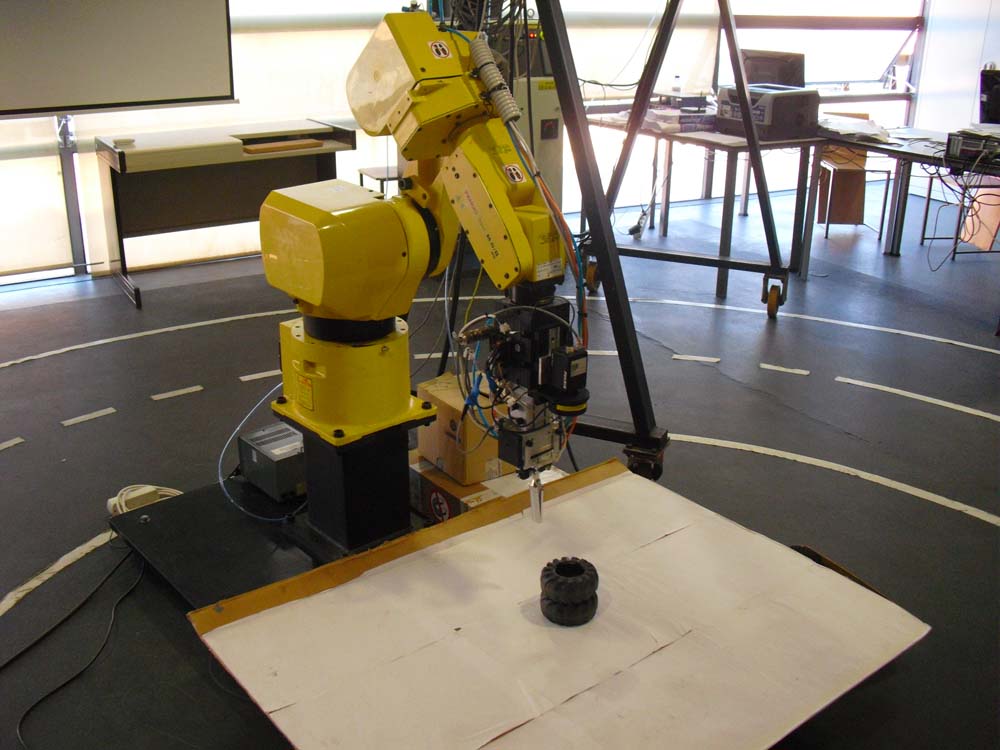
Robot FANUC
Robot FANUC

Robot _FANUC_
Robot _FANUC_

Scape Tecnologies 1

Scape Tecnologies 2

Scape Tecnologies 3

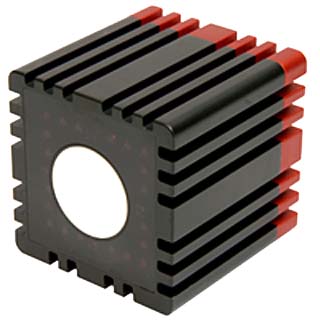
Sensor
Sensor
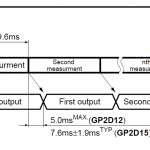
Sensor_frequencia_de_aquisição
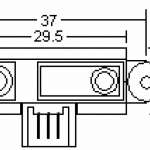
Sensor_medidas
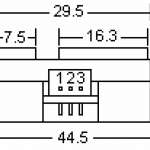
Sensor_pinos

Sistema de bin-picking 1983

Sistema de luz estruturada
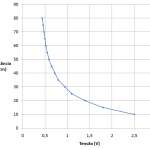
Tensão_VS_Distancia

Terminal
Terminal
Transform. de Referenciais_

UGI no robot
UGI no robot

UGI
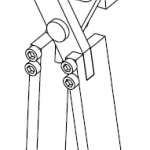
Unidade de Actuação

Visão estéreo
garra_inicial

rotação_zz

router02
router02
router02

wifi
wifi
 Ambiente de trabalho
Ambiente de trabalho
 Bin PIcking BrainTech1
Bin PIcking BrainTech1
 Bin PIcking BrainTech2
Bin PIcking BrainTech2
 Bin Picking - Dynamis2
Bin Picking - Dynamis2
 Bin Picking - Dynamis3
Bin Picking - Dynamis3
 Bin Picking - Dynamis4
Bin Picking - Dynamis4
 Bin Picking - Dynamis5
Bin Picking - Dynamis5
 Bin Picking Fanuc1
Bin Picking Fanuc1
 Bin Picking Fanuc2
Bin Picking Fanuc2
 Camara TOF
Camara TOF
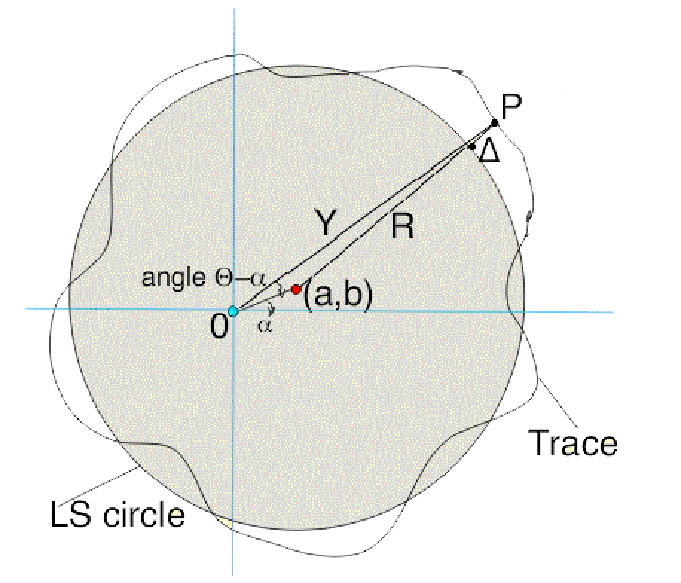 Circularidade
Circularidade
 Consola TP
Consola TP
 Consola TP
Consola TP
 Controlador
Controlador
 Controlador
Controlador
 Controlador_2
Controlador_2
 Câmara e anel de leds
Câmara e anel de leds
 Fixação do sensor
Fixação do sensor
 Fixação do sensor
Fixação do sensor
 Fixação do sensor
Fixação do sensor
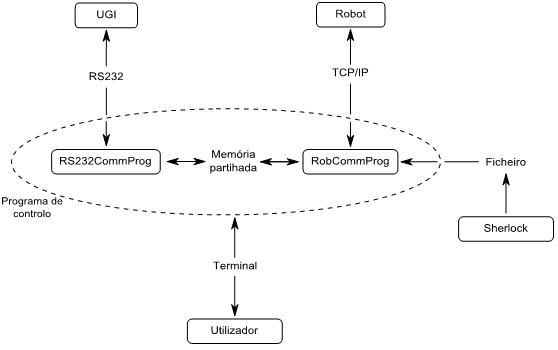 Funcionamento do programa de controlo
Funcionamento do programa de controlo
 Garra
Garra
 Garra
Garra
 Garra_nova
Garra_nova
 Hokuyo URG-04LX Laser
Hokuyo URG-04LX Laser
 Implementacao do filtro
Implementacao do filtro
 Implementacao do filtro
Implementacao do filtro
 Nova garra
Nova garra
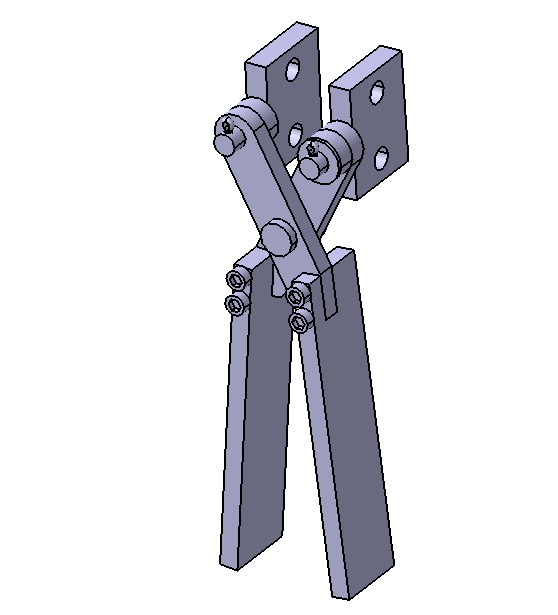 Nova garra
Nova garra
 PORTTI~1
PORTTI~1
 Pneu tipo I
Pneu tipo I
 Pneu tipo I
Pneu tipo I
 Pneu tipo II
Pneu tipo II
 Pneu tipo II
Pneu tipo II
 Pneu tipo III
Pneu tipo III
 Pneu tipo III
Pneu tipo III
 Pneu3
Pneu3
 Pneu3
Pneu3
 Pneus sobrepostos
Pneus sobrepostos
 Pneus sobrepostos
Pneus sobrepostos
 Pneus sobrepostos2
Pneus sobrepostos2
 Pneus sobrepostos2
Pneus sobrepostos2
 Pneus
Pneus
 RECIPNEU_1
RECIPNEU_1
 RECIPNEU_2
RECIPNEU_2
 RECIPNEU_3
RECIPNEU_3
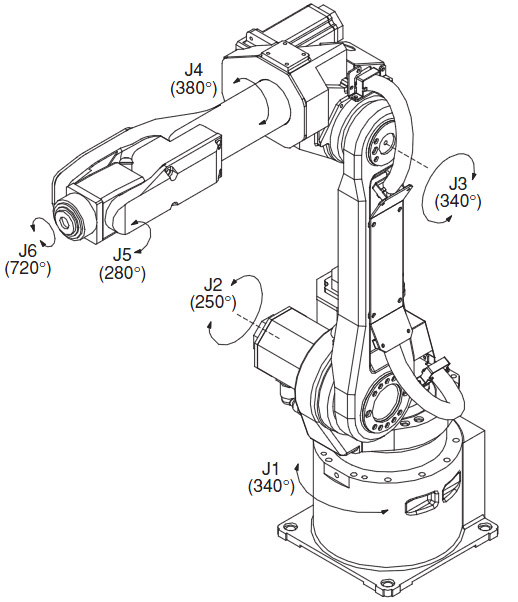 Robot FANUC
Robot FANUC
 Robot FANUC
Robot FANUC
 Robot _FANUC_
Robot _FANUC_
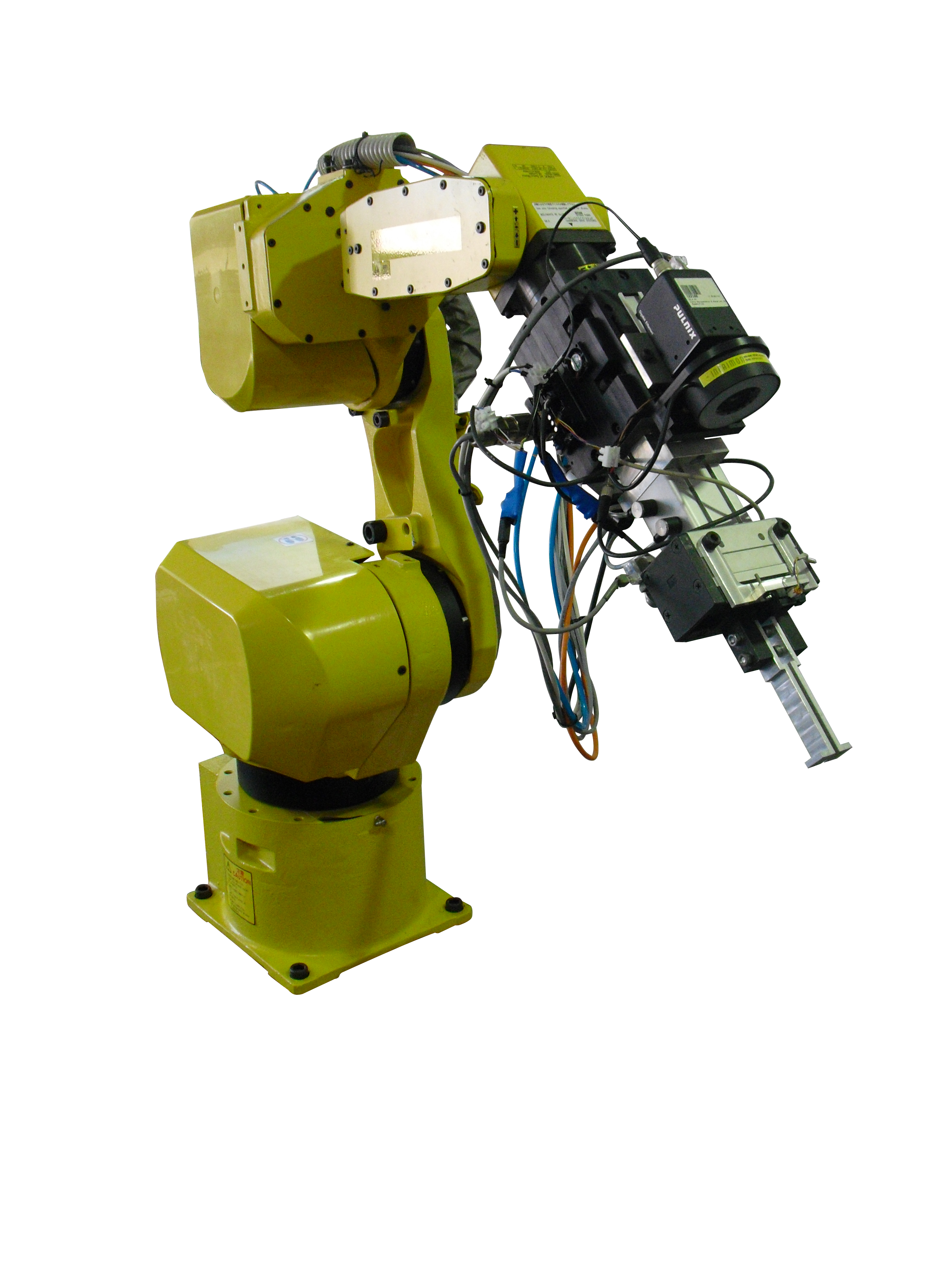 Robot _FANUC_
Robot _FANUC_
 Scape Tecnologies 1
Scape Tecnologies 1
 Scape Tecnologies 2
Scape Tecnologies 2
 Scape Tecnologies 3
Scape Tecnologies 3
 Sensor
Sensor
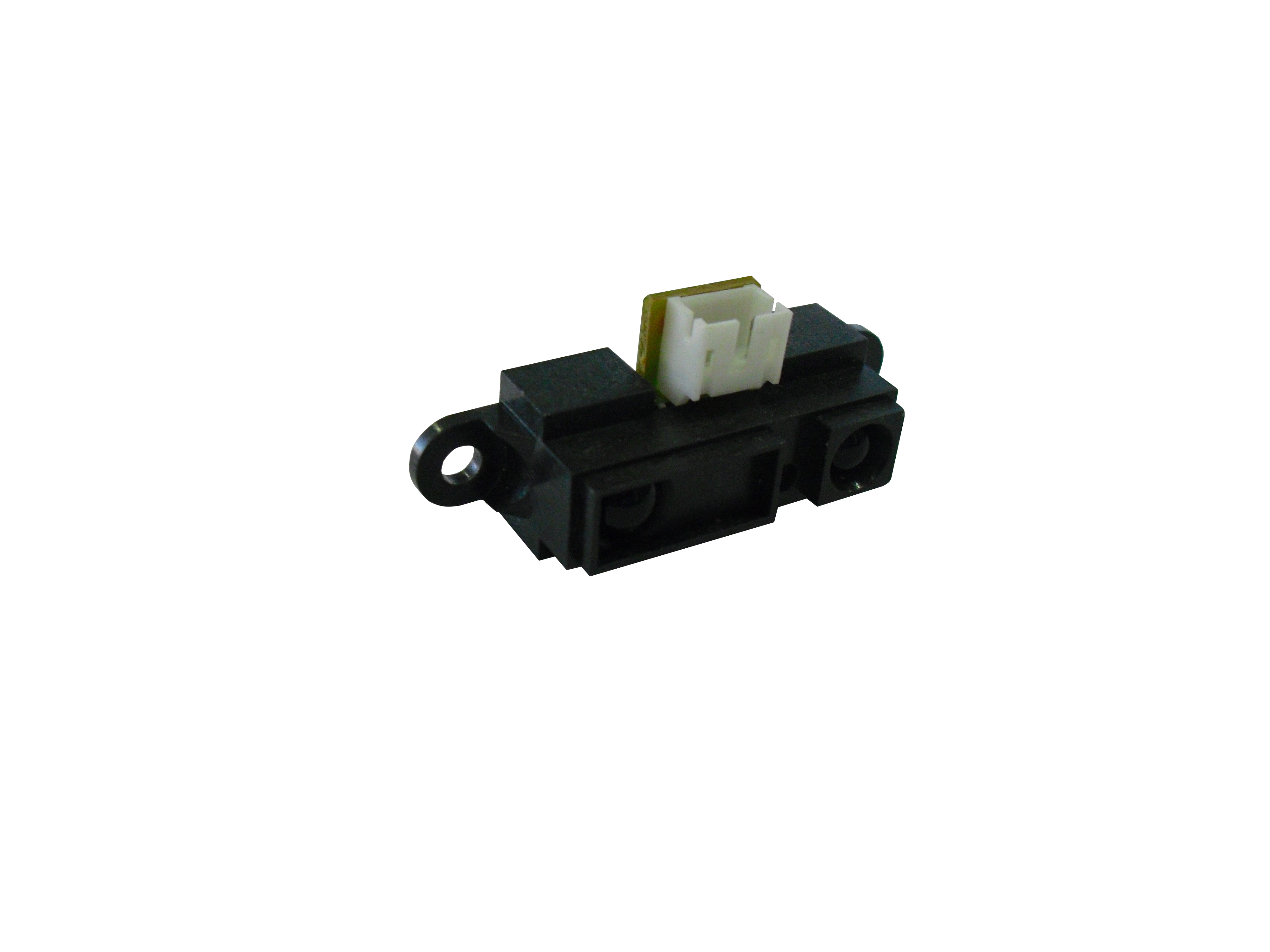 Sensor
Sensor
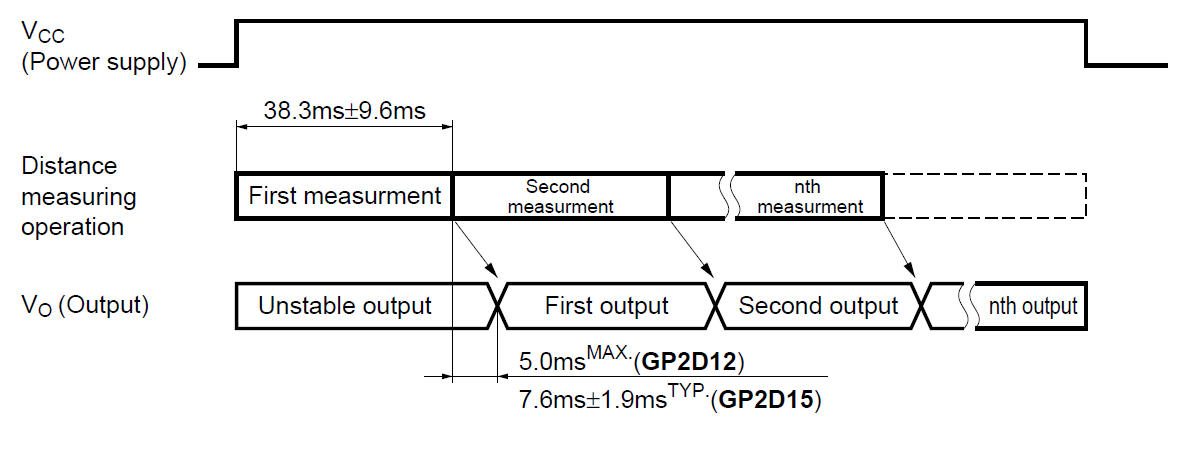 Sensor_frequencia_de_aquisição
Sensor_frequencia_de_aquisição
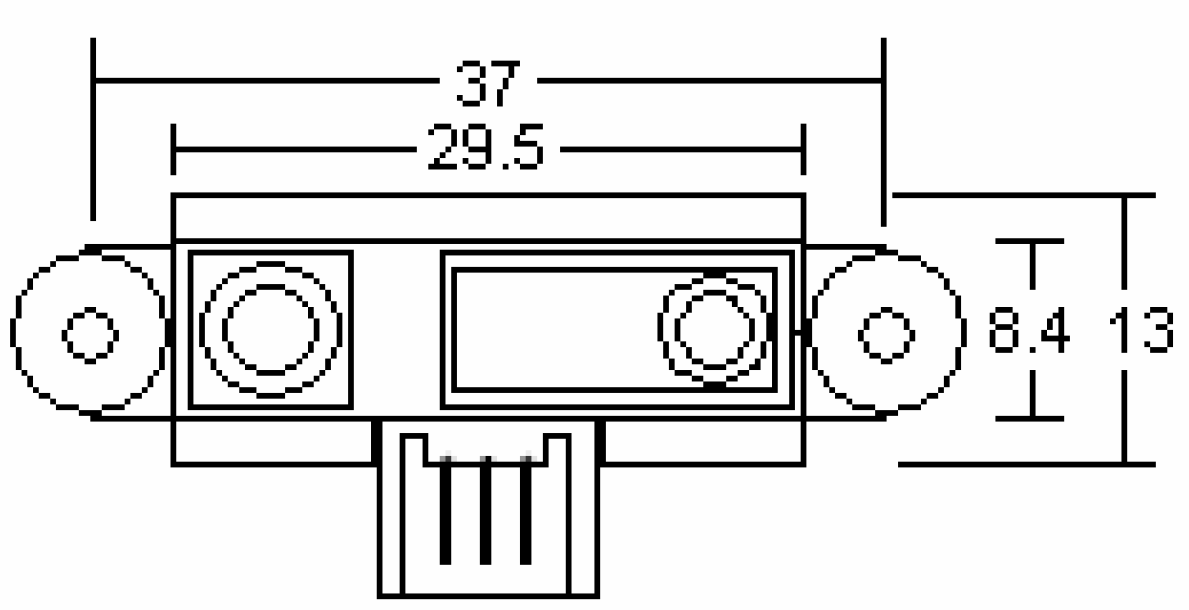 Sensor_medidas
Sensor_medidas
 Sensor_pinos
Sensor_pinos
 Sistema de bin-picking 1983
Sistema de bin-picking 1983
 Sistema de luz estruturada
Sistema de luz estruturada
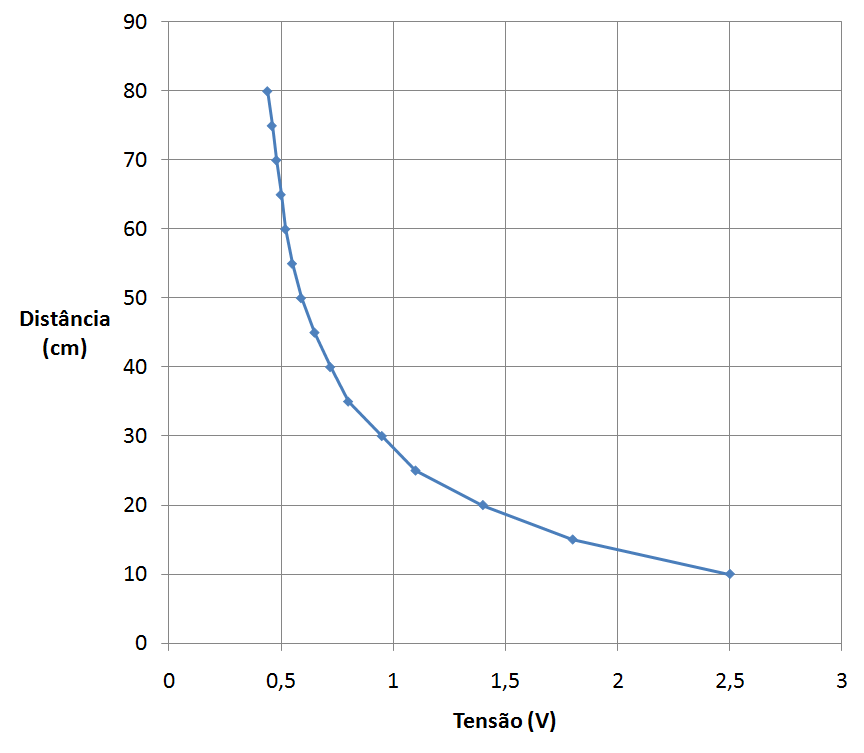 Tensão_VS_Distancia
Tensão_VS_Distancia
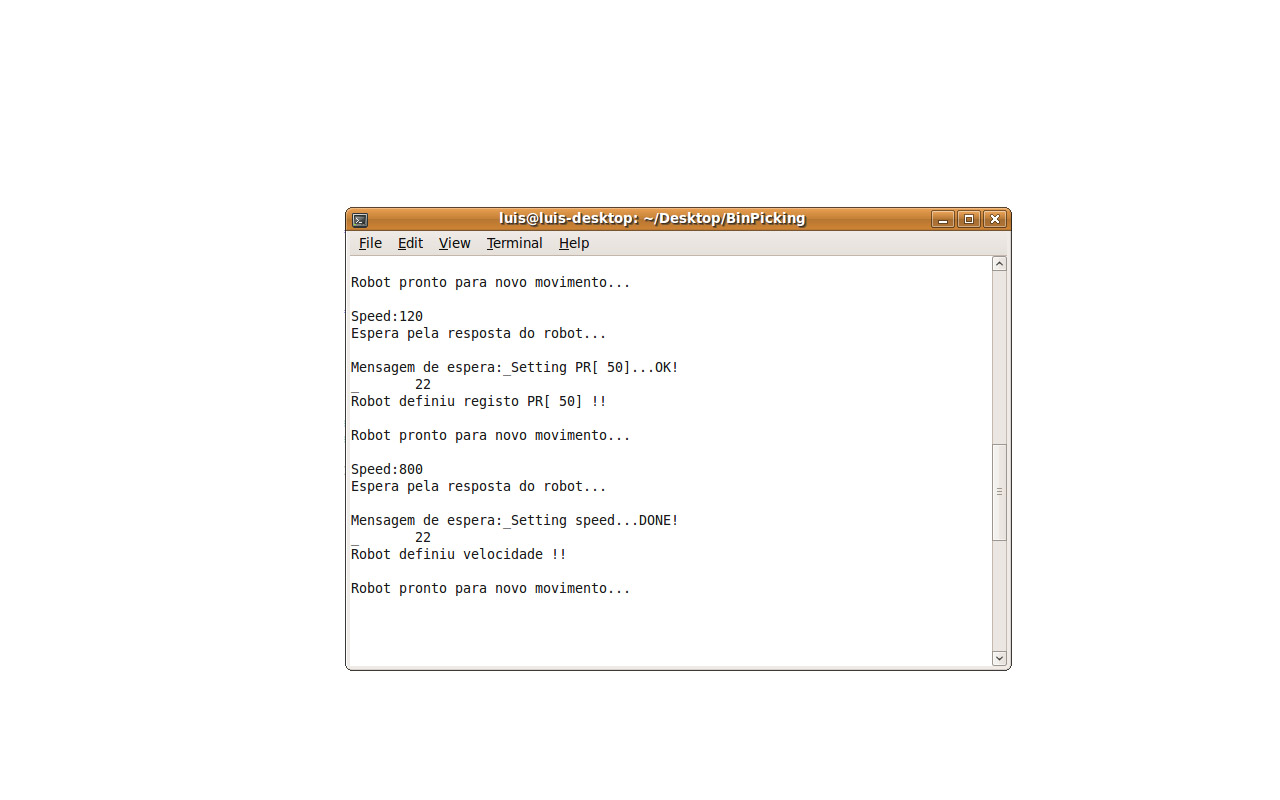 Terminal
Terminal
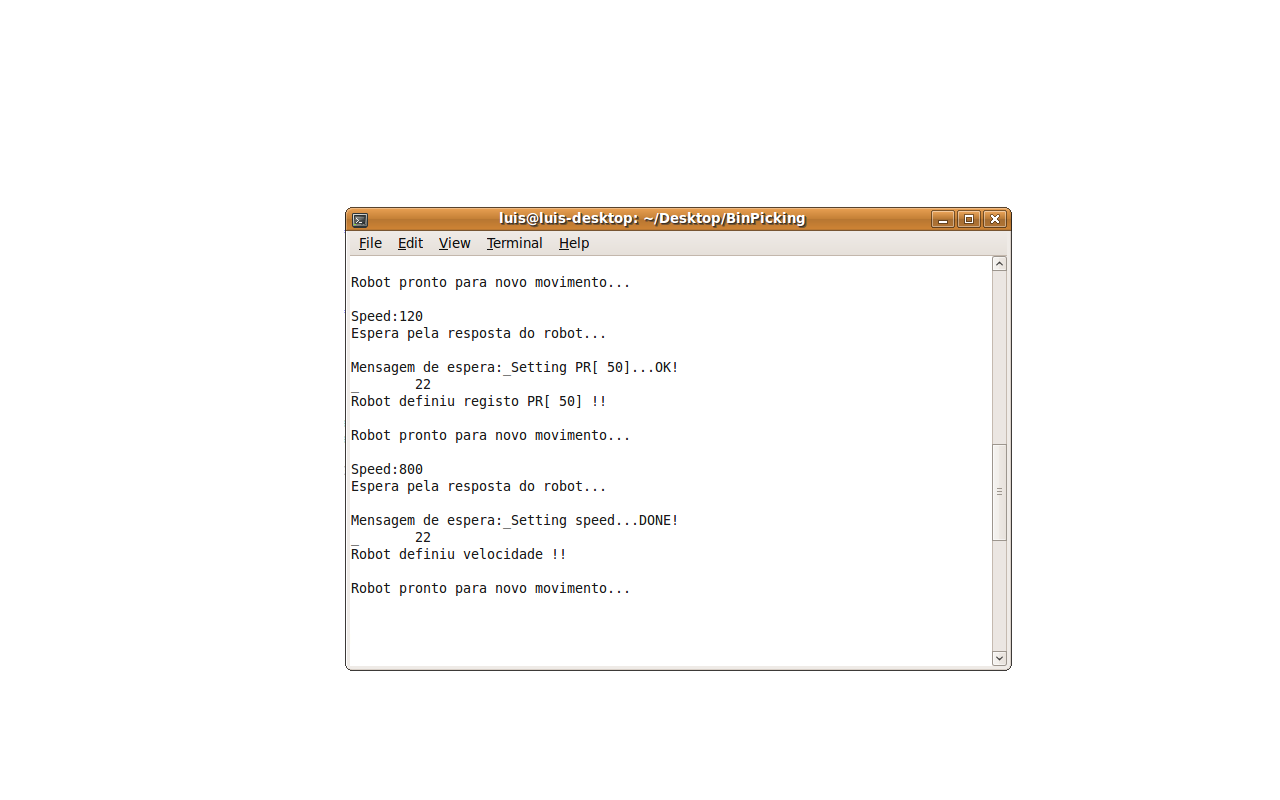 Terminal
Terminal
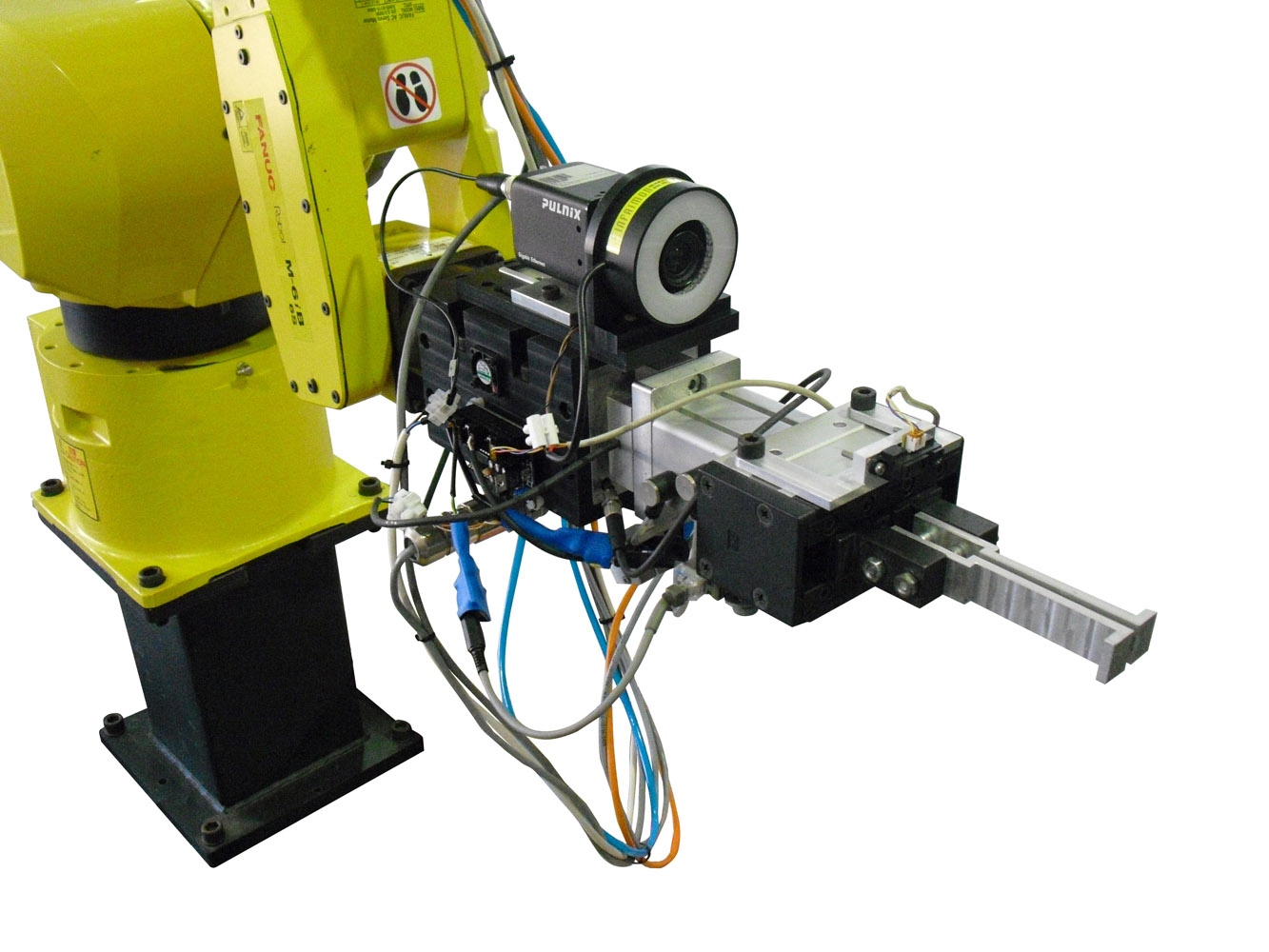 UGI no robot
UGI no robot
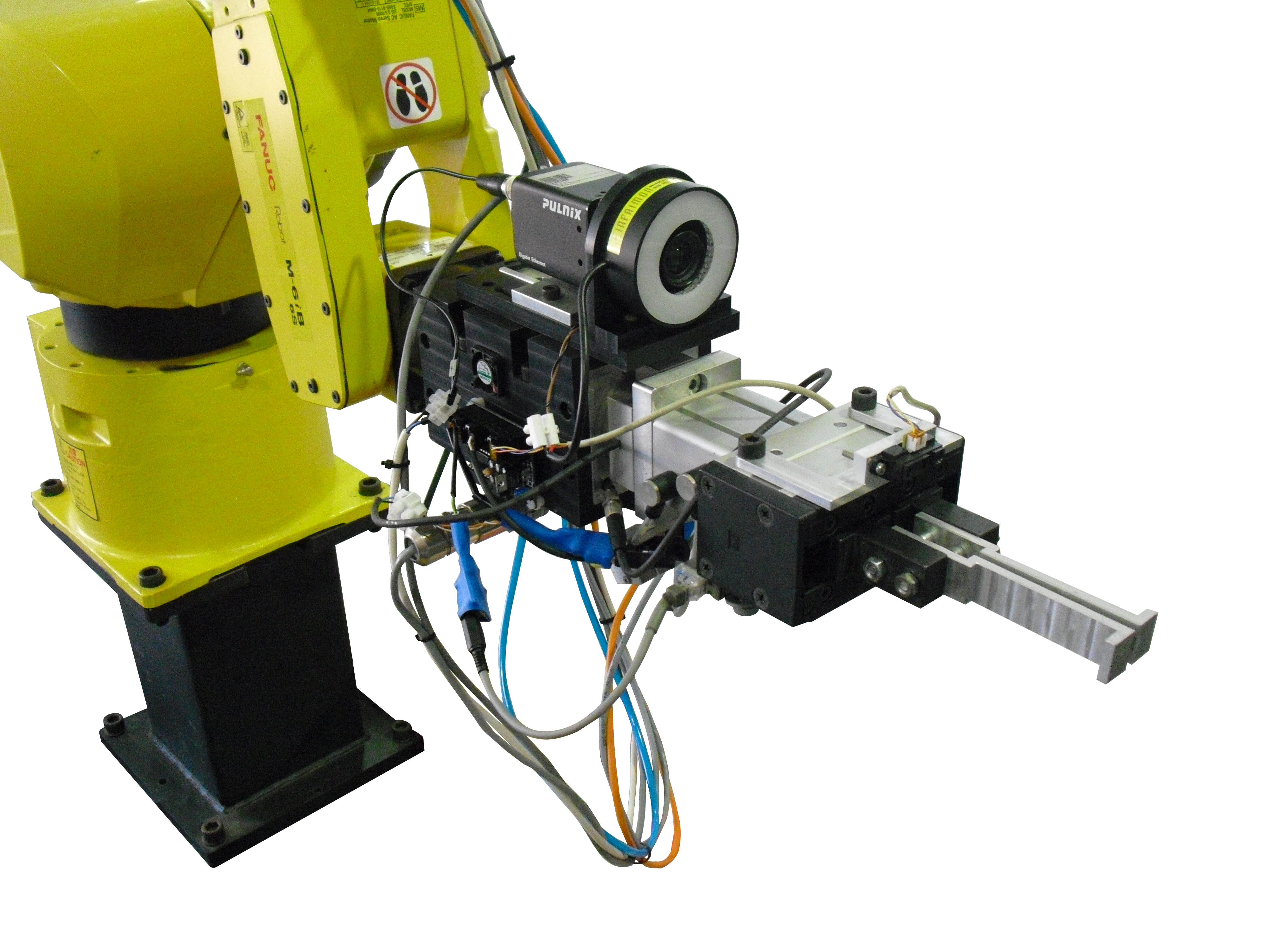 UGI no robot
UGI no robot
 UGI
UGI
 Unidade de Actuação
Unidade de Actuação
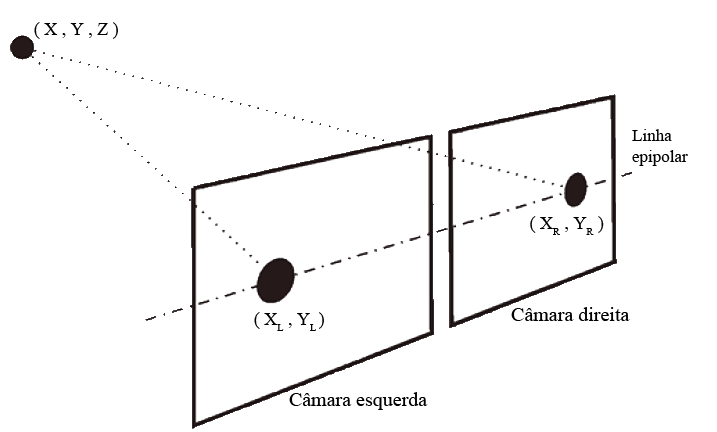 Visão estéreo
Visão estéreo
 garra_inicial
garra_inicial
 rotação_zz
rotação_zz
 router02
router02
 router02
router02
 router02
router02
 wifi
wifi
 wifi
wifi