|
Projects |
 |
 |
 |
 |
|
|

|
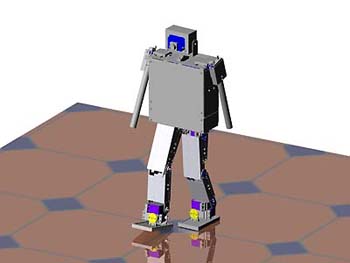
RoboCup and FIRA are two international robotics game organizations which hold annual humanoid-robots soccer-playing competitions. Their quest: "Develop a team of humanoids to play against human World Champions by the year 2050." The aim of this project is to build small size (height being shorter than 0.5m) humanoid robots that can win these competitions. These robots are designed using off-the-shelf components which can be found easily in hobby shops. We named it ROPE, which stands for RObot PEle or RObot for Personal Entertainment, representing our desire and determination to make it play soccer with excellent skill. The robot will have to be able to detect and approach a ball, and be able to dribble it through the opponents and deliver the ball into the goal. Different strategies and decision making algorithms will be explored. This project is also an excellent platform for technological education, especially in the areas of control, mechanical design, machine vision, system integration. The first version ROPE-I has been built to test the
performance of several components such as actuators and sensors as
well as the mechanical design. We have managed to make it walk
statically. A short video clip can be found here (QuickTime -
4.5MB). With enough experience and confidence gained from developing
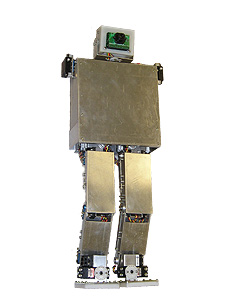
ROPE-I, we are now building another biped with stronger structure
and higher height than the older. Images of ROPE-I and ROPE-II can
be seen below. | |||||||||||
|
ROPE-I |
ROPE-II |
||||||||||
|
ROPE-II |
ROPE-II |
||||||||||
|
Specifications of ROPE-II
|
|||||||||||
|
Control system The performance of a biped directly depends on the control system. If the control system is not sufficient, no matter how good is the control algorithm, the biped may not have desired performance. However, the power of a control system is usually inversely proportional to its size. We need to built a powerful control system but within space limit of the application. The control system used in ROPE-II consists of computer system, sensors and actuators. Followings is a diagram illustrating connection among various elements of the control system. | |||||||||||
 | |||||||||||
|
Computer system
| |||||||||||
|
Sensors There are several sensors needed for the biped to walk stably. These include:
| |||||||||||
|
Actuators Actuators are also a very important element of a biped. A perfect actuator should be a light-weight yet high-torque motor. We have found that servo motors, which are used extensively in hobby aeroplane, are very suitable for this application. Initially we used Futaba motor, but it is not strong enough with a stall torque of 8 kgcm. We are now using Hitec motor with torque up to 13 kgcm. That means we can hang a 13 kg object at the arm length 1cm! | |||||||||||
|
Control algorithms To have a good control system is just half of the solution. A robust conrol algorithm is the other half. Several control algorithms have been studied and simulated to find a suitable algorithm for this robot. Among the algorithms of studying are static walking, virtual model control, linear inverted pendulum, ZMP trajectory planning,... Some simulations can be found in the movie clips section. With the solid background gaining from studying existing algorithms, we will develop a new algorithm suitable for this biped. | |||||||||||
|
Movie clips Static Walking of ROPE-I [*.wmv format - 3MB] [QuickTime format - 4.5MB] Static Walking of ROPE-II [*.wmv format - 3MB] [QuickTime format - 4.5MB] ROPE-II kicks a ball [*.wmv format - 7MB] Static Walking Simulation [*.wmv format - 1MB] [QuickTime format - 5MB] Linear Inverted Pendulum Simulation [*.wmv format - 2MB] [QuickTime format - 4.5MB] Virtual Model Control using Genetic Algorithm to optimize ankle gain [*.wmv format - 2MB]
Updated: 24 Dec 2003 | |||||||||||