
2013-06-01 10.59.02

2013-06-01 11.01.40

2013-06-01 11.03.50

NAO_stairs

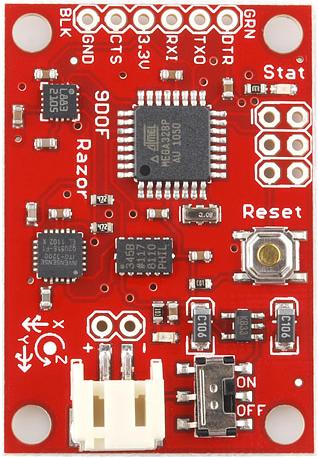
RAZOR_image2

RAZOR_imagem1
RAZOR_imagem1
RAZOR_network
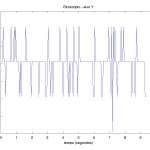
RAZOR_still_0_0_0_Y

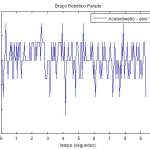
RAZOR_still_0_0_0_accel_X
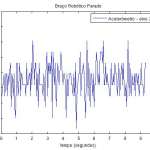
RAZOR_still_0_0_0_accel_Y
RAZOR_still_0_0_0_accel_Z
RAZOR_still_0_0_0_gyro_X
RAZOR_still_0_0_0_gyro_Y

RAZOR_still_0_0_0_gyro_Z
TWNHR

apoio_fanuc_desmontado

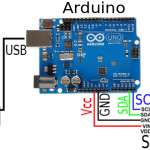
arduino_uno
arduino_uno

astronauta

atuador_ativo_humanoide

atuador_passivo_humanoide

capacit_accel

complementary_filter_example

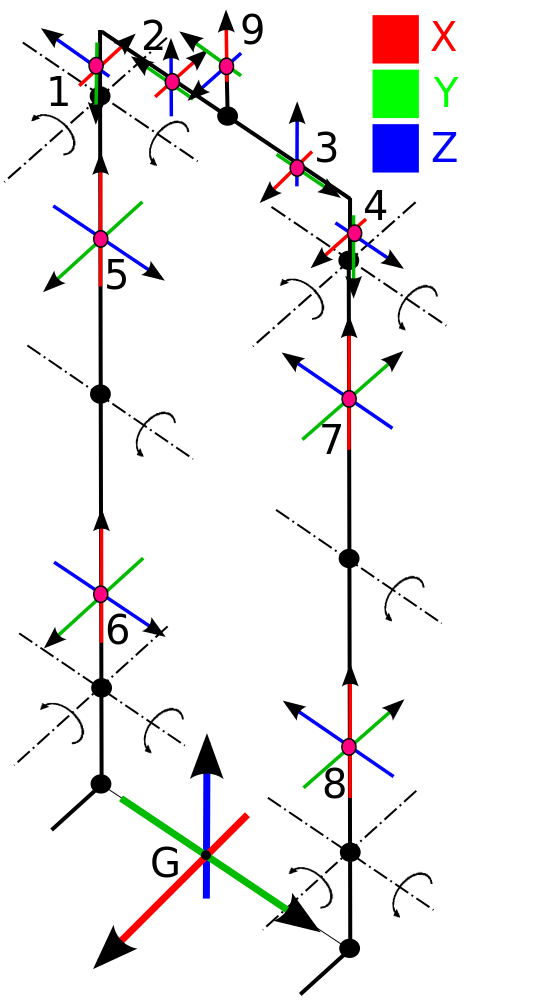
diagrama_cinematica_perna_1

diagrama_cinematica_perna_simplificado
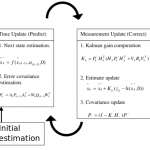
ekf_algorithm

fanuc_joints
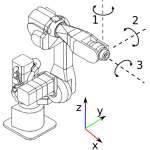
fanuc_rot

fanuc_trans
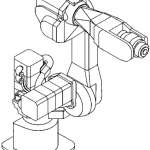
fanucs_image

ftdi

humandoid_network
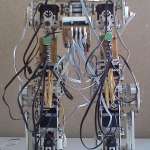
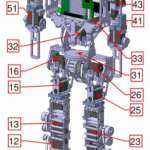
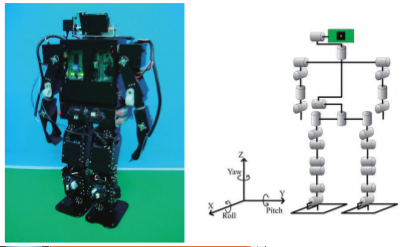
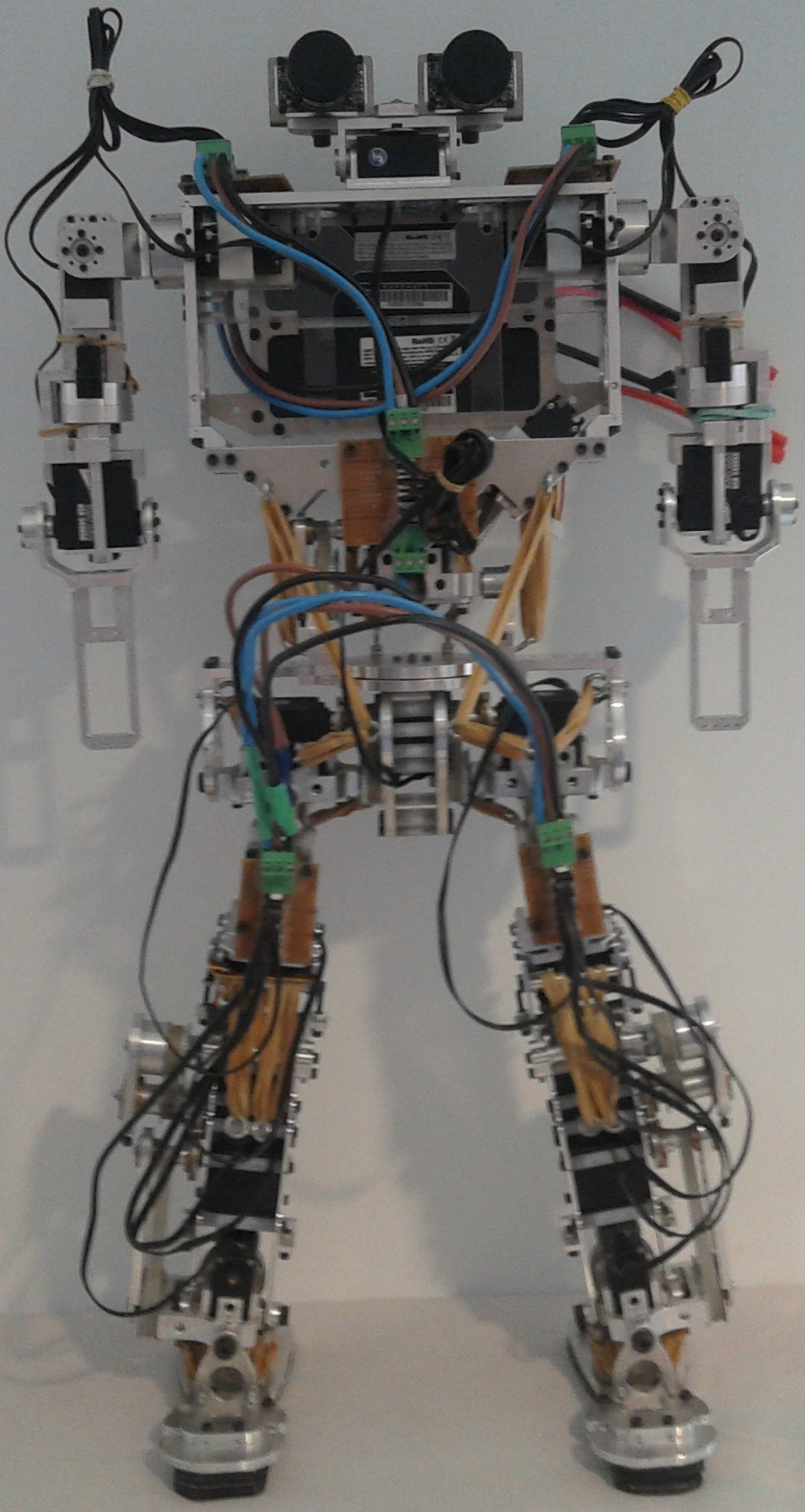
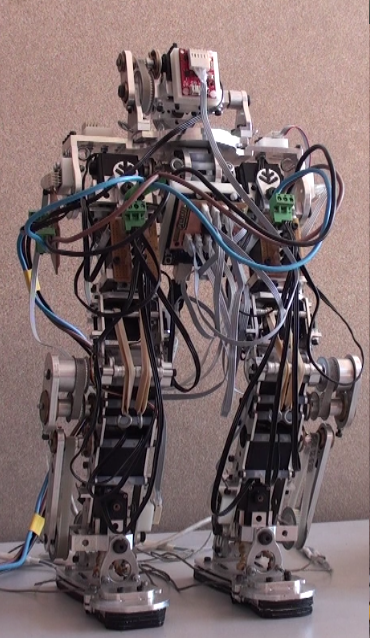
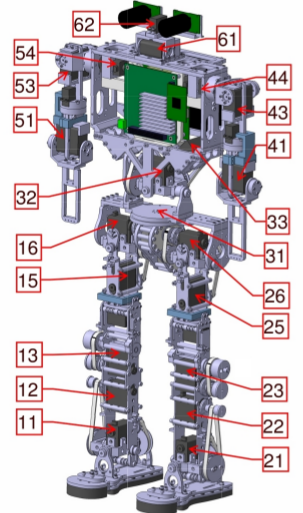
humanoid_half_image

humanoid_imu_suit

humanoid_inferior_small_diagram
humanoid_network

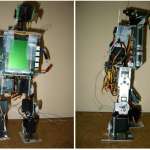
humanoid_v1

humanoid_v2
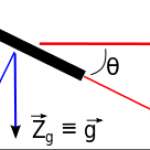
inclinometro_example
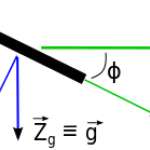
inclinometro_example_2
jupp

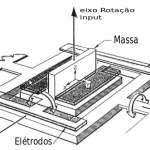
mems_accel_capacitivo
mems_accel_capacitivo

mems_gyro_vib
mems_gyro_vib

minIMU-v2_POLOLU_image2

minIMU_POLOLU_image1
minIMU_POLOLU_image1
montagem_testes_pololu
montagem_testes_razor

move_xx_1
move_xx_2

move_yy_1
move_yy_2
move_zz_1

move_zz_2

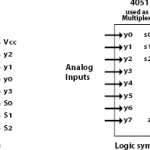
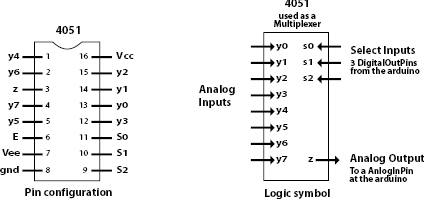
mux4051
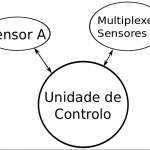
mux_
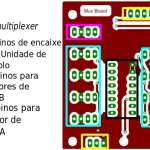
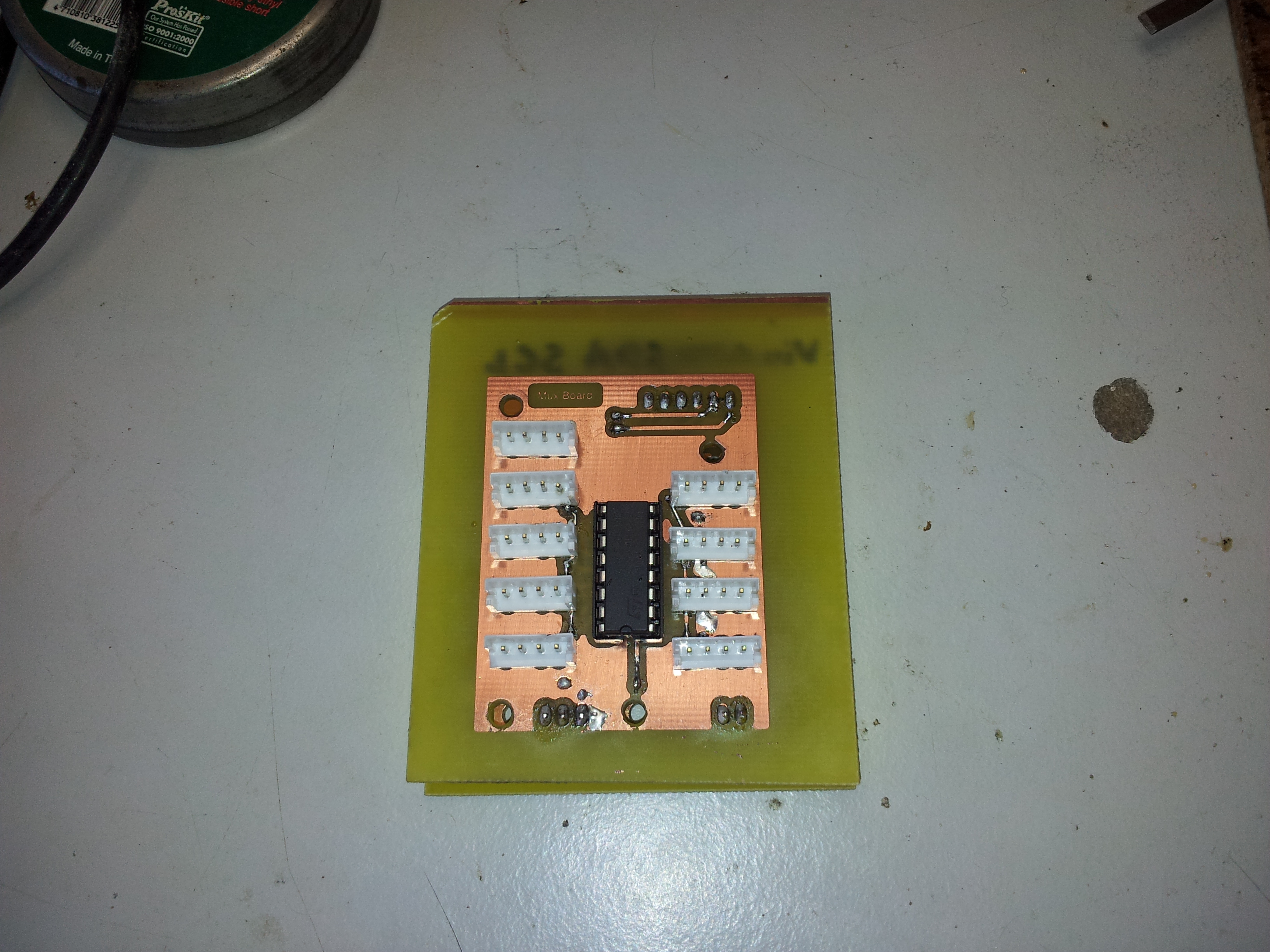
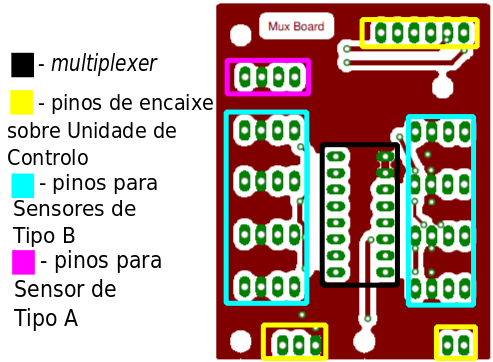
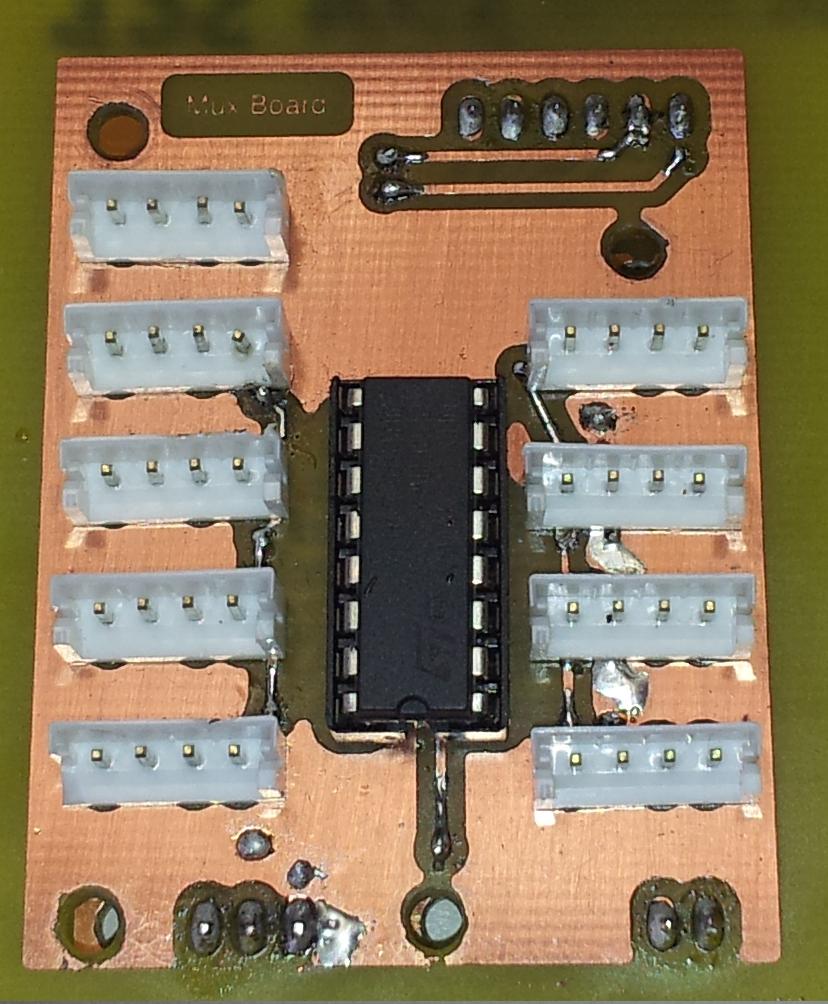
mux_board
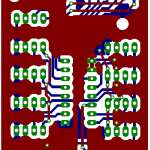
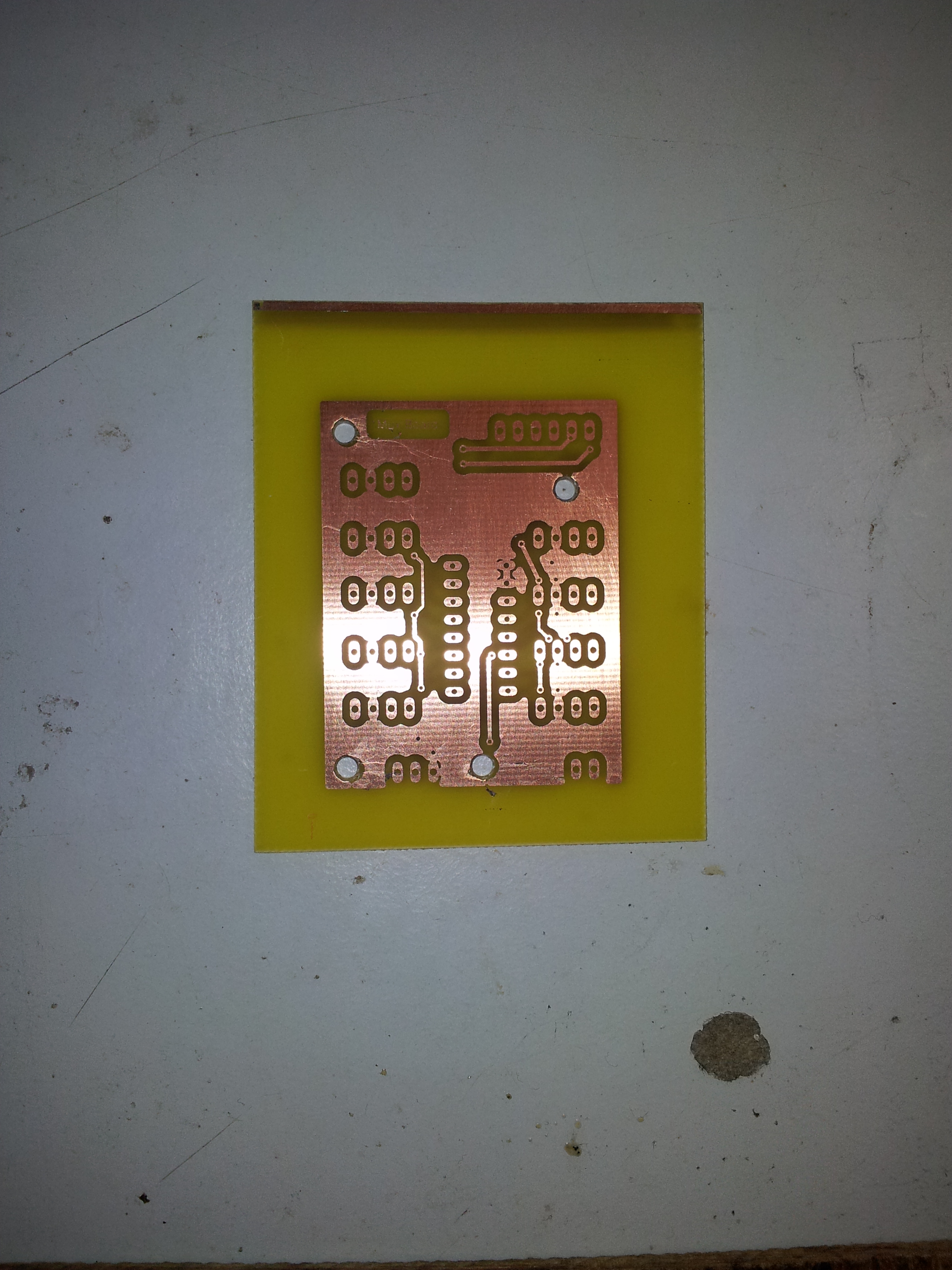
mux_board_bot
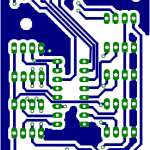
mux_board_top

mux_hcf4051be
mux_schematic

orientacao_imu
pc
pc
pc

pcs
piezo_accel
piezo_resist_accel

placa

placa_PCB_com_solda
placa_PCB_sem_solda
pololu_sensor_rede

pressure_cell

pressure_cells_foot

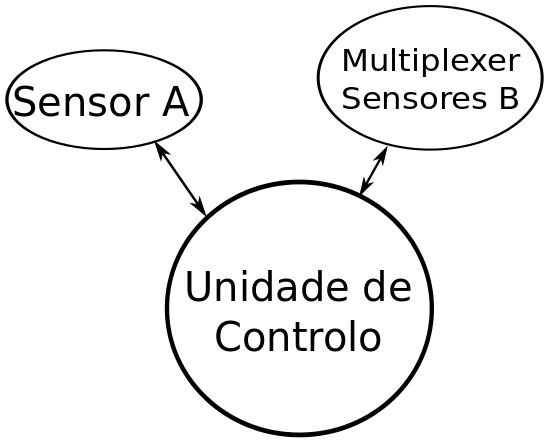
rede_pequena_esquema
rede_pequena_esquema
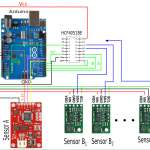
rede_pequena_esquema_RAZOR
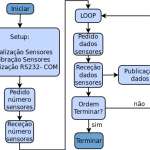
rede_programa

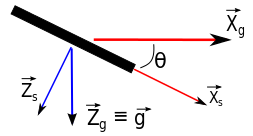
rotation_arrow

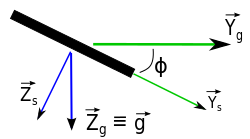
rotation_arrow_2
rotor_gyro

rpy

search_coil_magnet

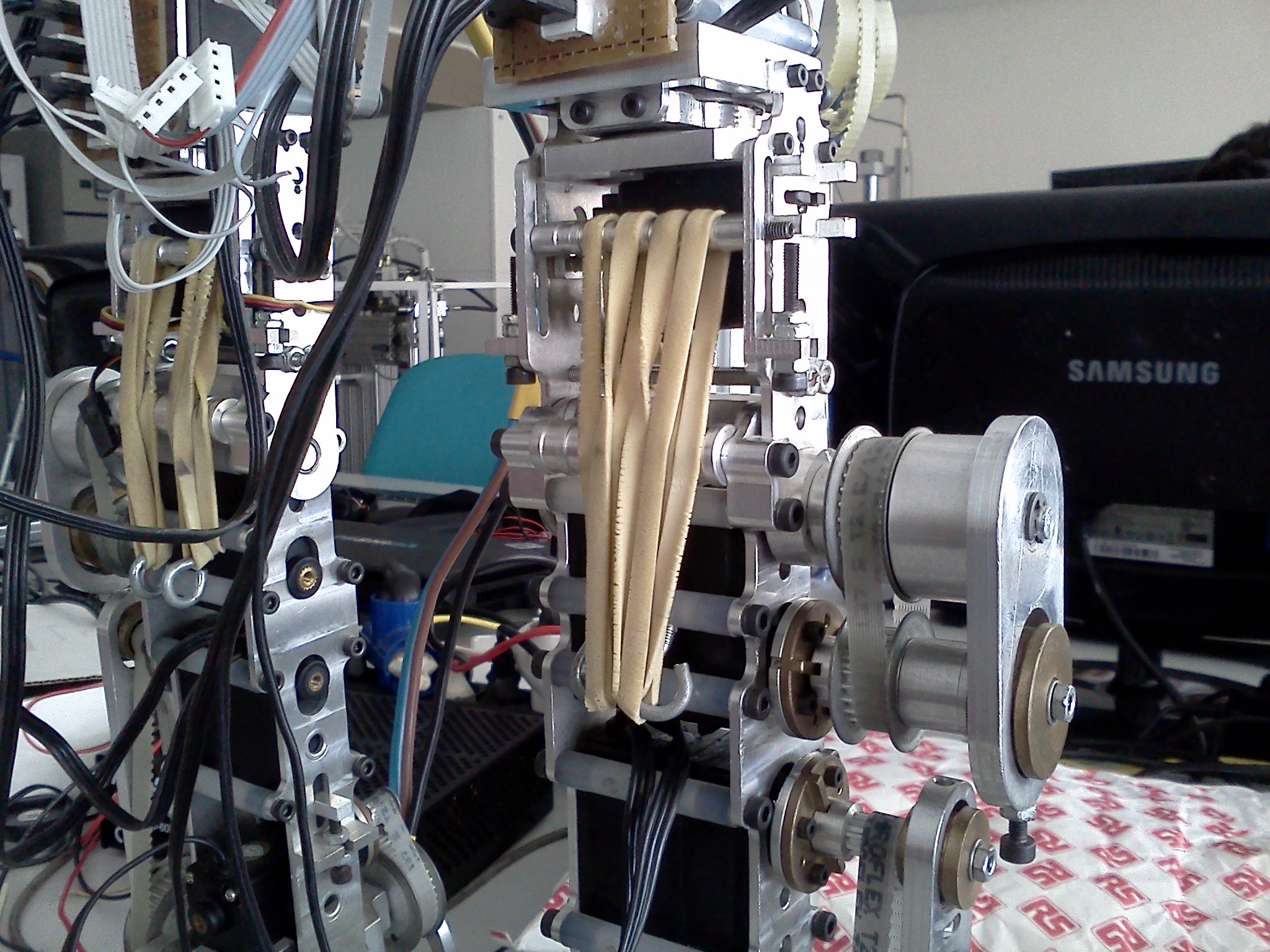
sensores_montados
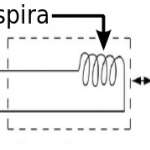
serach_coil_magnet
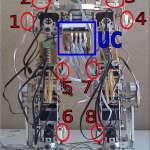
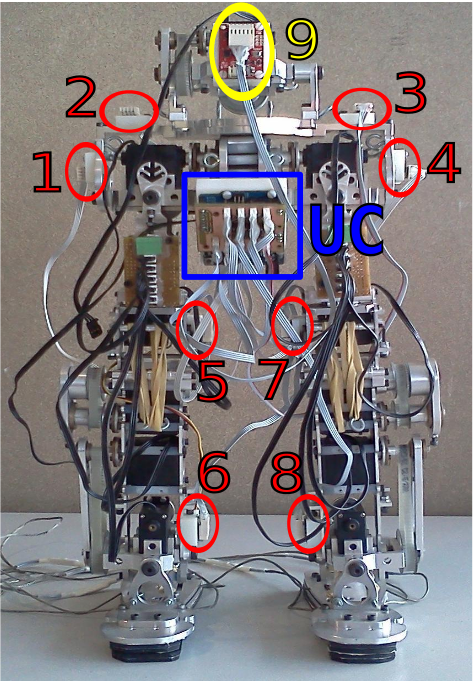
servos_numbered

suporte_arduino

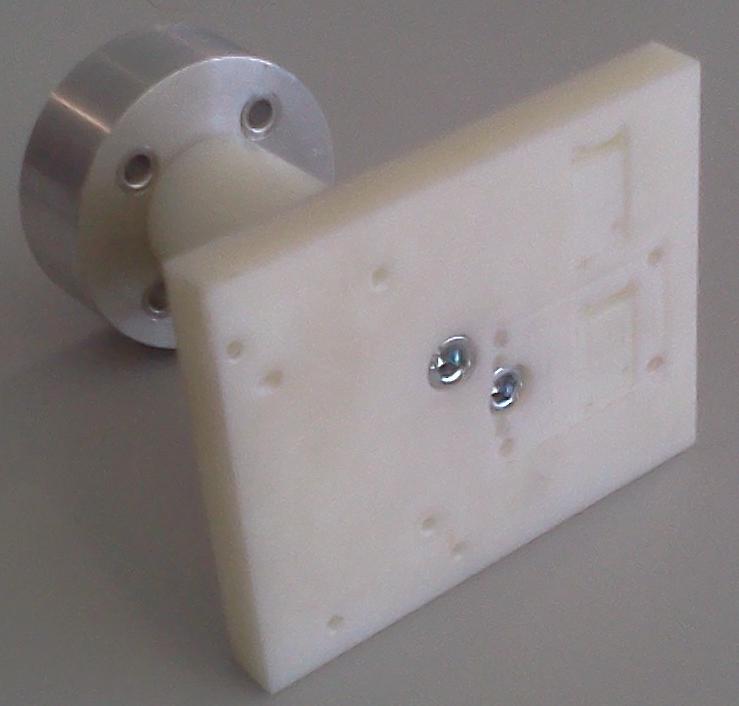
suporte_fanuc

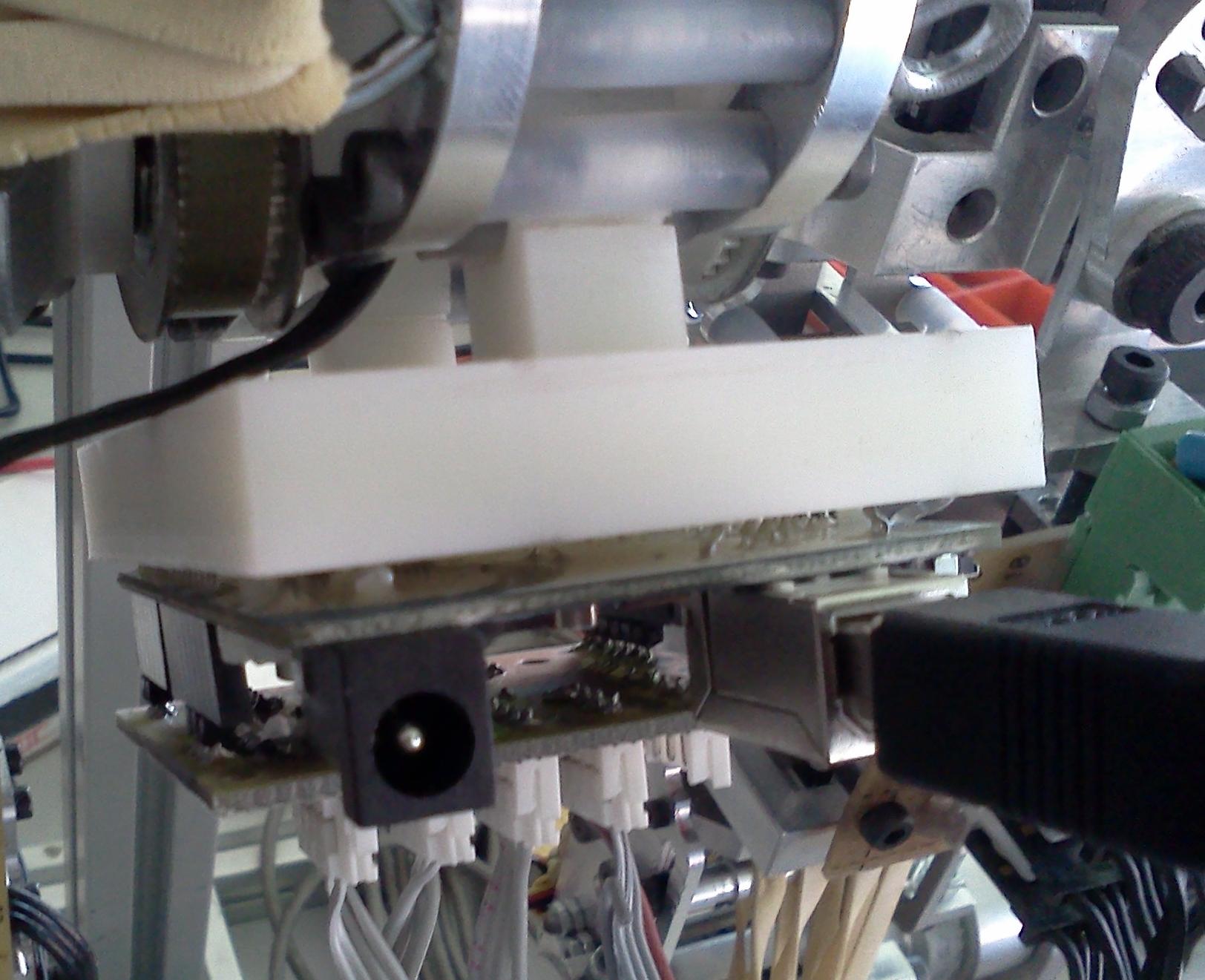
suporte_fanuc_montado

suporte_montado
tao_pie_pie
topologia_rede

truth_table_mux
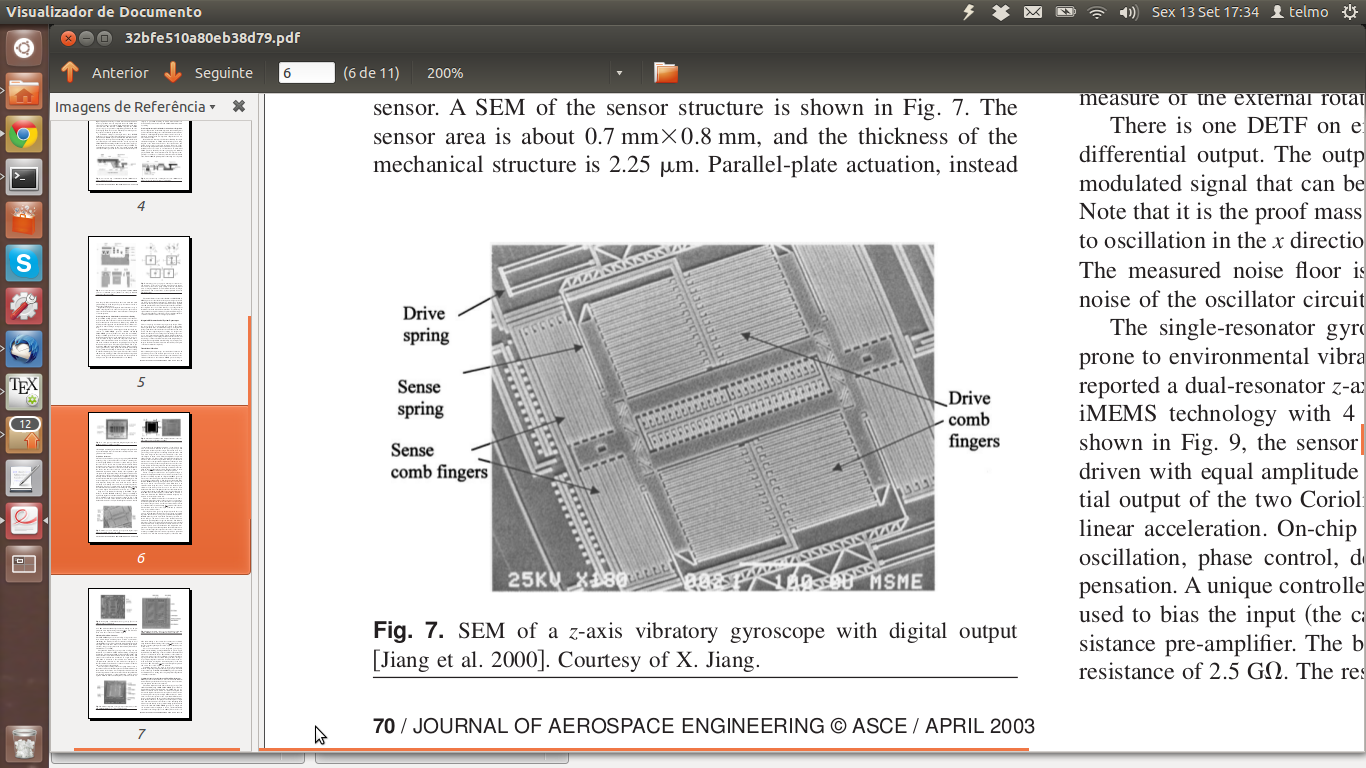
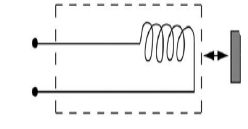
vibrating_gyro
 2013-06-01 10.59.02
2013-06-01 10.59.02
 2013-06-01 11.01.40
2013-06-01 11.01.40
 2013-06-01 11.03.50
2013-06-01 11.03.50
 NAO_stairs
NAO_stairs
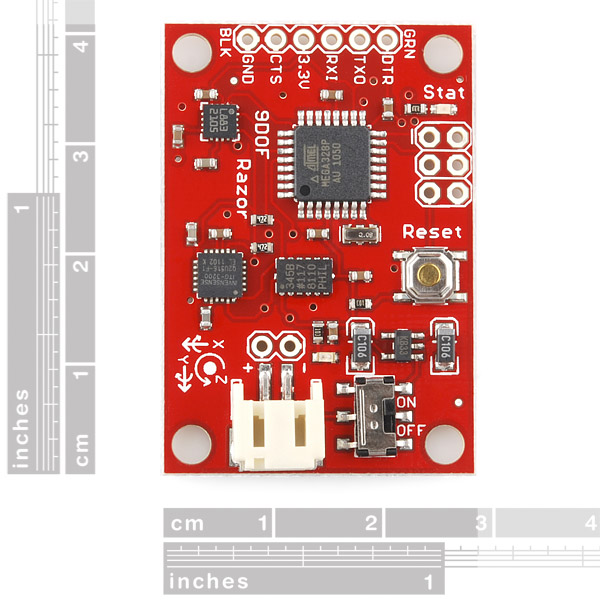 RAZOR_image2
RAZOR_image2
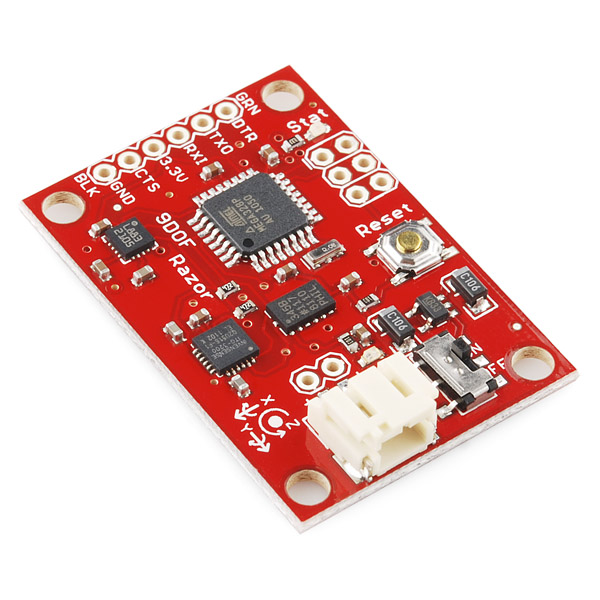 RAZOR_imagem1
RAZOR_imagem1
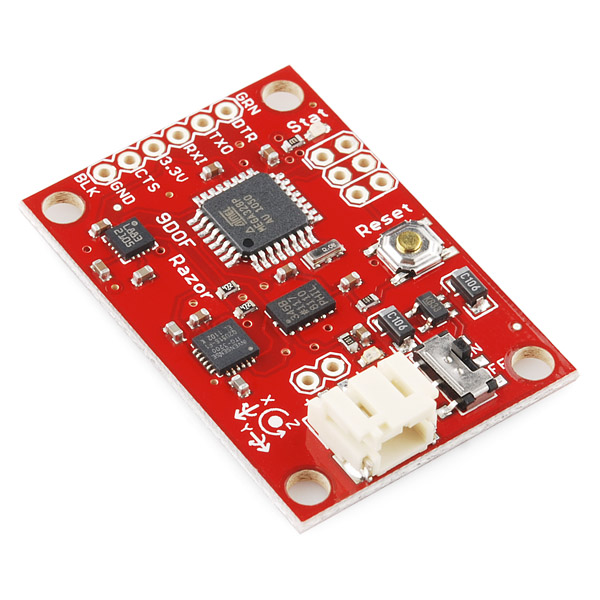 RAZOR_imagem1
RAZOR_imagem1
 RAZOR_network
RAZOR_network
 RAZOR_still_0_0_0_Y
RAZOR_still_0_0_0_Y
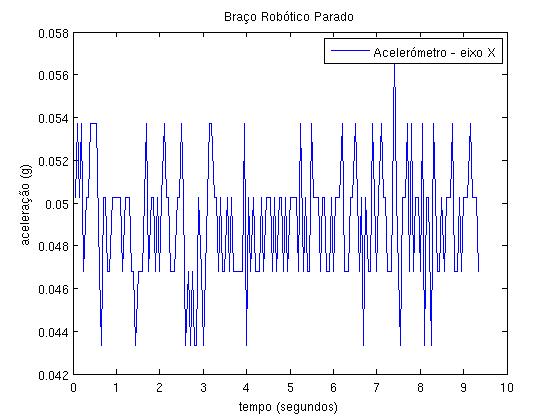 RAZOR_still_0_0_0_accel_X
RAZOR_still_0_0_0_accel_X
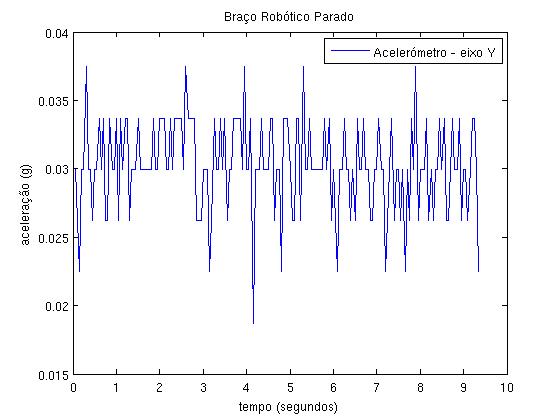 RAZOR_still_0_0_0_accel_Y
RAZOR_still_0_0_0_accel_Y
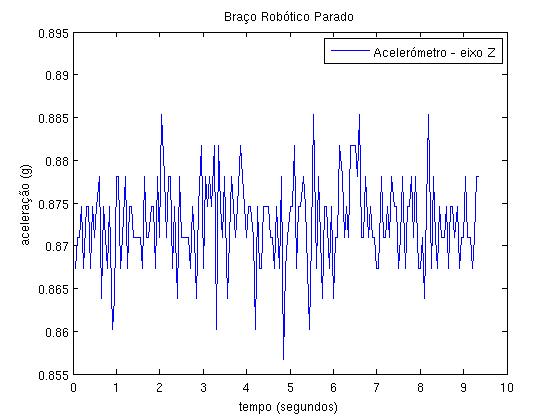 RAZOR_still_0_0_0_accel_Z
RAZOR_still_0_0_0_accel_Z
 RAZOR_still_0_0_0_gyro_X
RAZOR_still_0_0_0_gyro_X
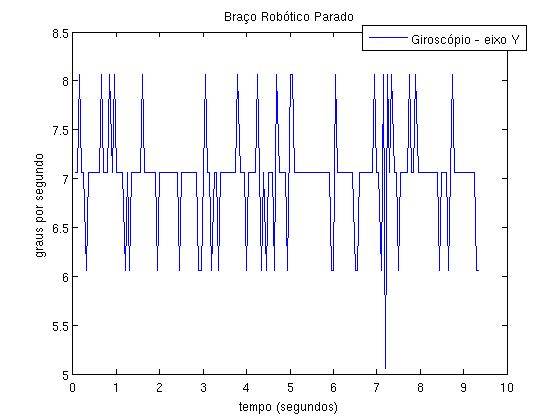 RAZOR_still_0_0_0_gyro_Y
RAZOR_still_0_0_0_gyro_Y
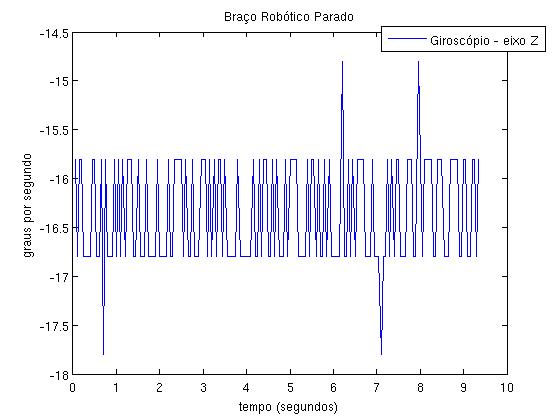 RAZOR_still_0_0_0_gyro_Z
RAZOR_still_0_0_0_gyro_Z
 TWNHR
TWNHR
 apoio_fanuc_desmontado
apoio_fanuc_desmontado
 arduino_uno
arduino_uno
 arduino_uno
arduino_uno
 astronauta
astronauta
 atuador_ativo_humanoide
atuador_ativo_humanoide
 atuador_passivo_humanoide
atuador_passivo_humanoide
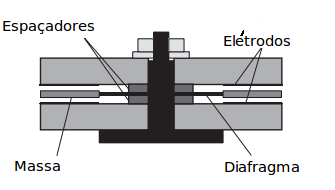 capacit_accel
capacit_accel
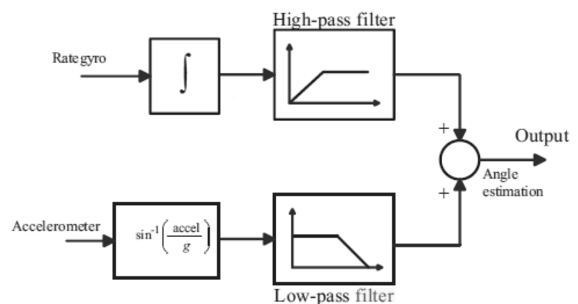 complementary_filter_example
complementary_filter_example
 diagrama_cinematica_perna_1
diagrama_cinematica_perna_1
 diagrama_cinematica_perna_simplificado
diagrama_cinematica_perna_simplificado
 ekf_algorithm
ekf_algorithm
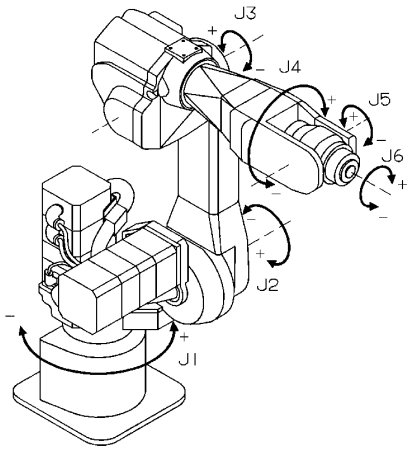 fanuc_joints
fanuc_joints
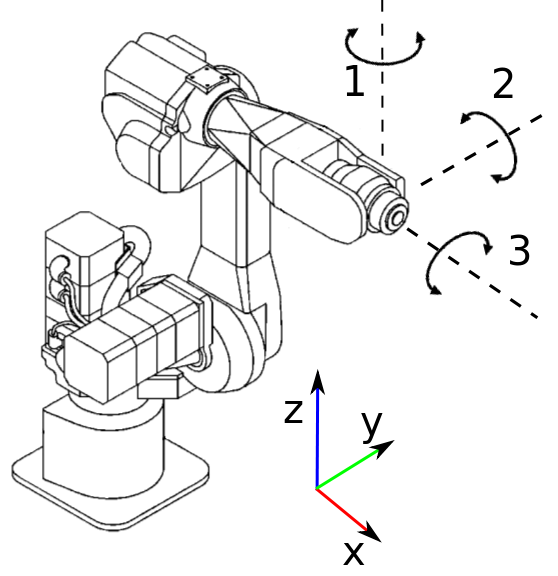 fanuc_rot
fanuc_rot
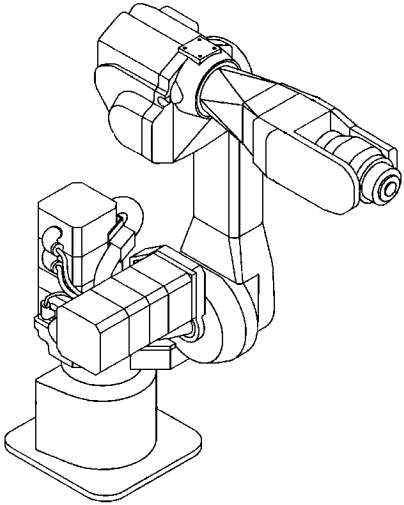 fanucs_image
fanucs_image
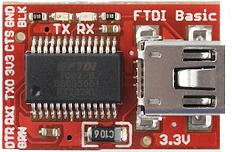 ftdi
ftdi
 humandoid_network
humandoid_network
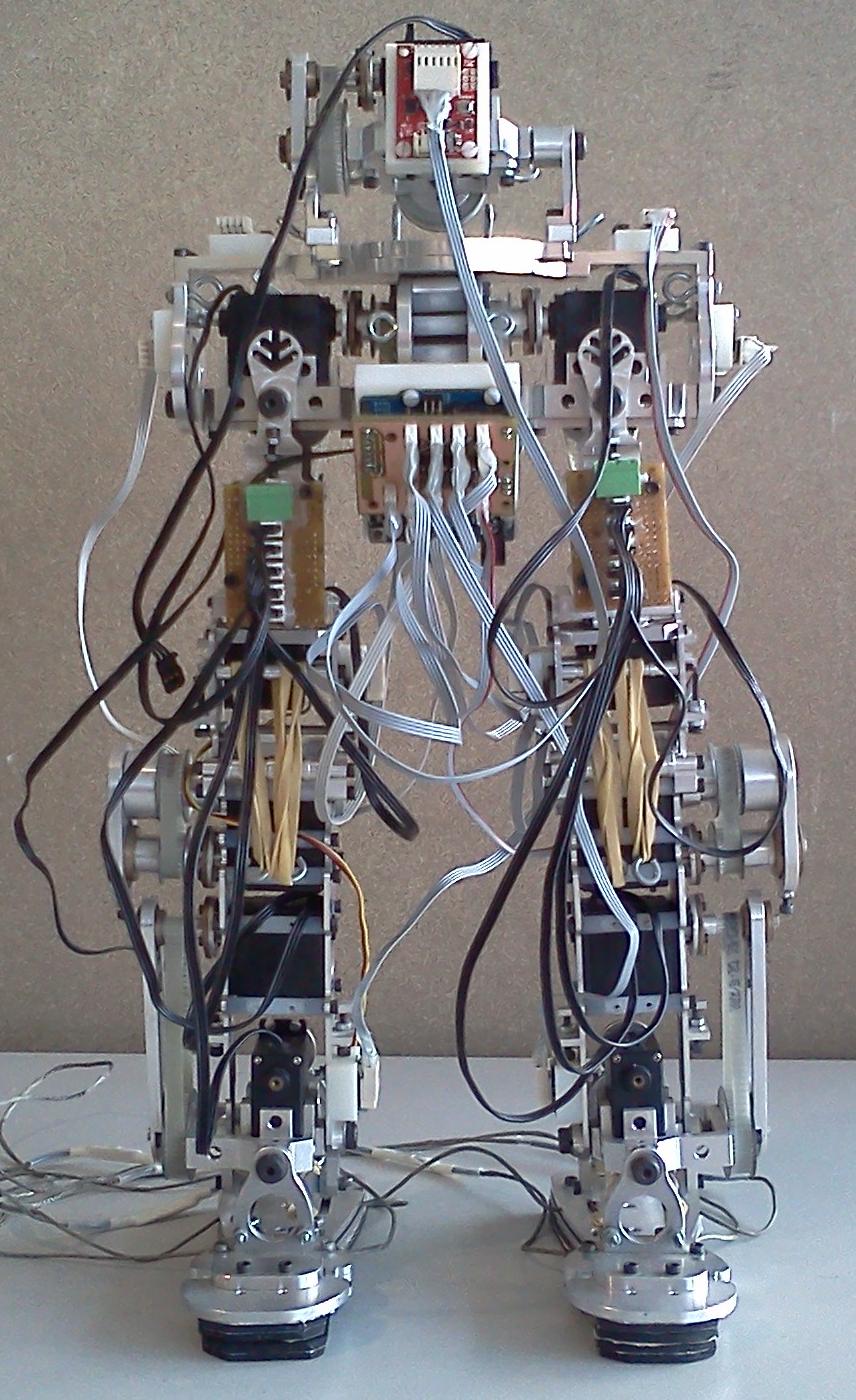 humanoid_half_image
humanoid_half_image
 humanoid_imu_suit
humanoid_imu_suit
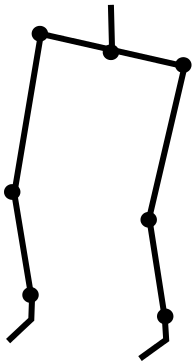 humanoid_inferior_small_diagram
humanoid_inferior_small_diagram
 humanoid_network
humanoid_network
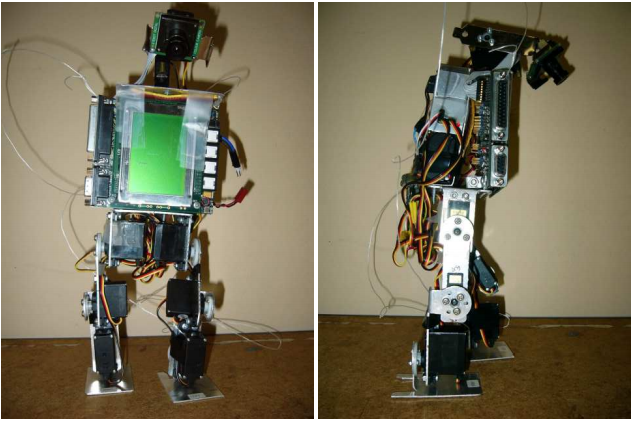
 humanoid_v1
humanoid_v1
 humanoid_v2
humanoid_v2
 inclinometro_example
inclinometro_example
 inclinometro_example_2
inclinometro_example_2
 jupp
jupp
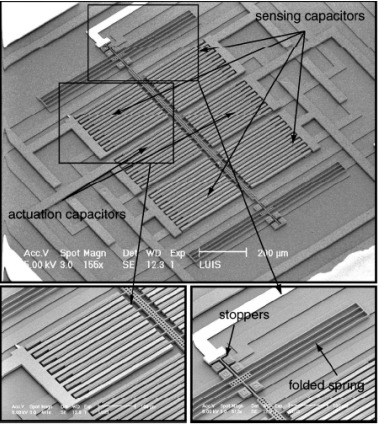 mems_accel_capacitivo
mems_accel_capacitivo
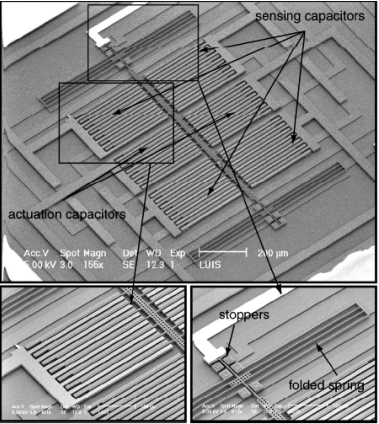 mems_accel_capacitivo
mems_accel_capacitivo
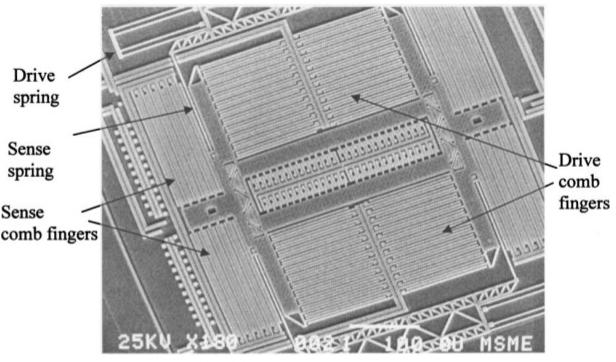 mems_gyro_vib
mems_gyro_vib
 mems_gyro_vib
mems_gyro_vib
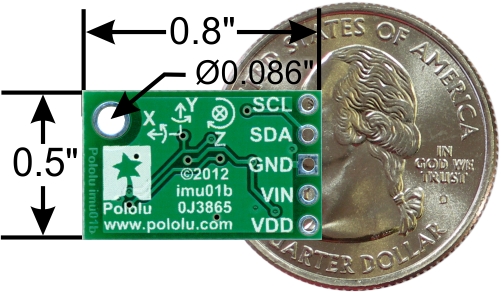 minIMU-v2_POLOLU_image2
minIMU-v2_POLOLU_image2
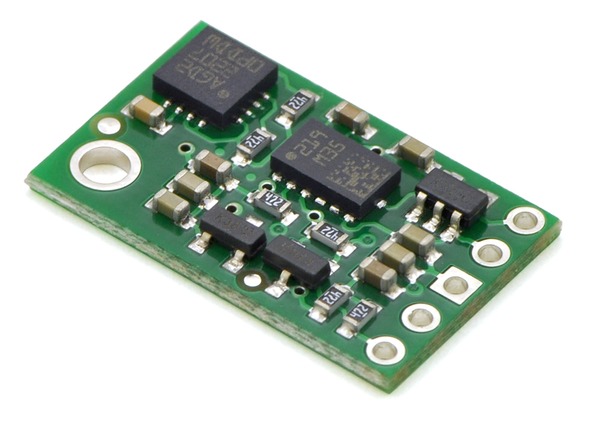 minIMU_POLOLU_image1
minIMU_POLOLU_image1
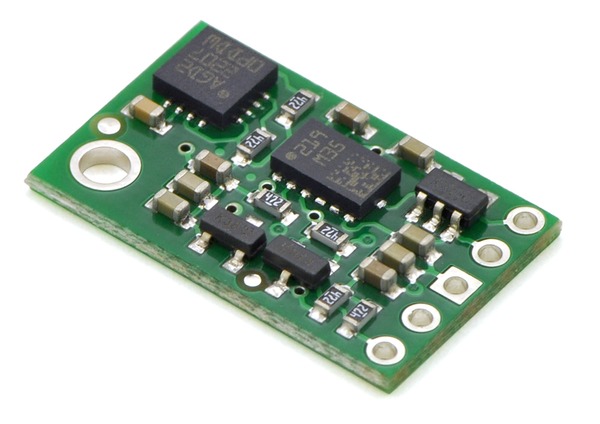 minIMU_POLOLU_image1
minIMU_POLOLU_image1
 montagem_testes_pololu
montagem_testes_pololu
 montagem_testes_razor
montagem_testes_razor
 move_xx_1
move_xx_1
 move_xx_2
move_xx_2
 move_yy_1
move_yy_1
 move_yy_2
move_yy_2
 move_zz_1
move_zz_1
 move_zz_2
move_zz_2
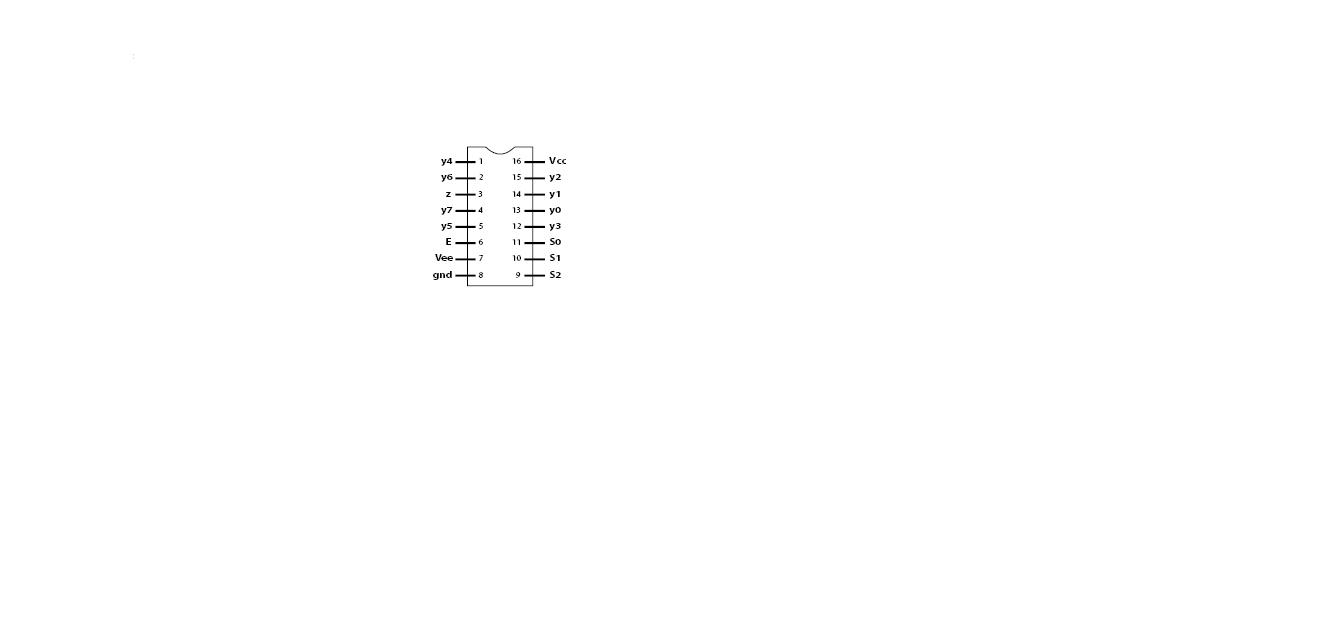 mux4051
mux4051
 mux_
mux_
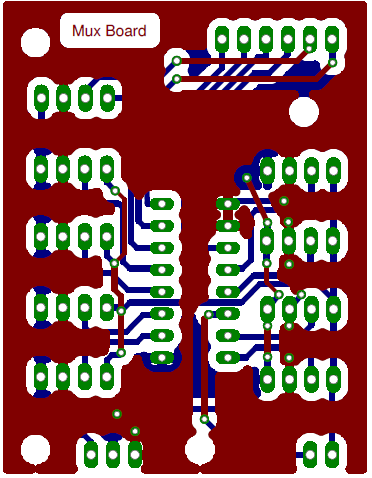 mux_board
mux_board
 mux_board_bot
mux_board_bot
 mux_board_top
mux_board_top
 mux_hcf4051be
mux_hcf4051be
 mux_schematic
mux_schematic
 orientacao_imu
orientacao_imu
 pc
pc
 pc
pc
 pc
pc
 pcs
pcs
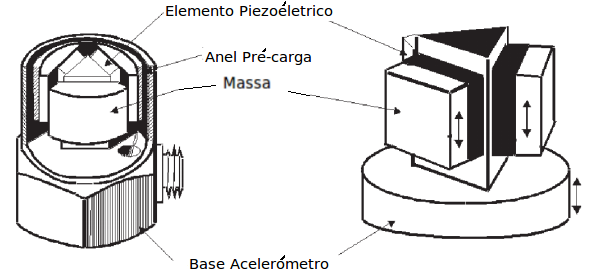 piezo_accel
piezo_accel
 piezo_resist_accel
piezo_resist_accel
 placa
placa
 placa_PCB_com_solda
placa_PCB_com_solda
 placa_PCB_sem_solda
placa_PCB_sem_solda
 pololu_sensor_rede
pololu_sensor_rede
 pressure_cell
pressure_cell
 pressure_cells_foot
pressure_cells_foot
 rede_pequena_esquema
rede_pequena_esquema
 rede_pequena_esquema
rede_pequena_esquema
 rede_pequena_esquema_RAZOR
rede_pequena_esquema_RAZOR
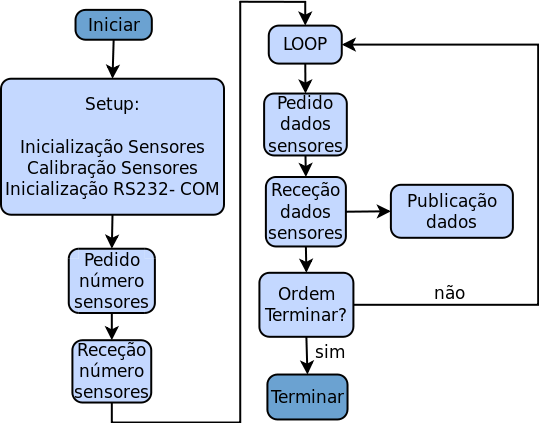 rede_programa
rede_programa
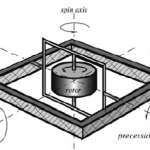
 rotor_gyro
rotor_gyro
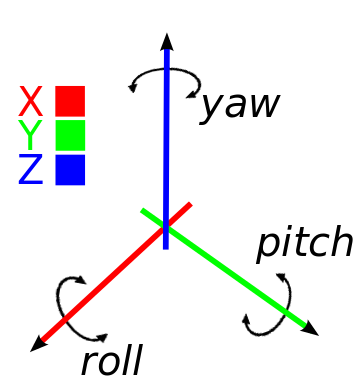 rpy
rpy
 search_coil_magnet
search_coil_magnet
 sensores_montados
sensores_montados
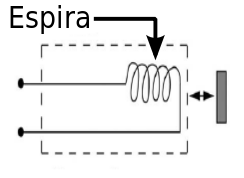 serach_coil_magnet
serach_coil_magnet
 servos_numbered
servos_numbered
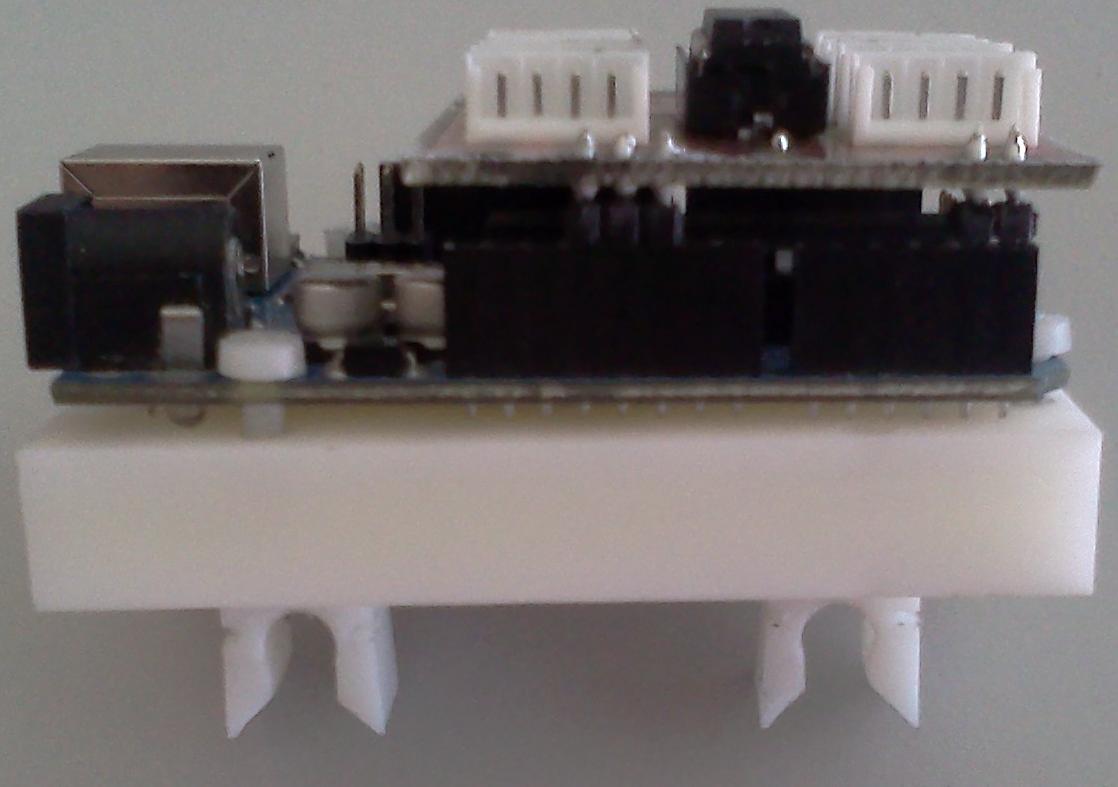 suporte_arduino
suporte_arduino
 suporte_fanuc
suporte_fanuc
 suporte_fanuc_montado
suporte_fanuc_montado
 suporte_montado
suporte_montado
 tao_pie_pie
tao_pie_pie
 topologia_rede
topologia_rede
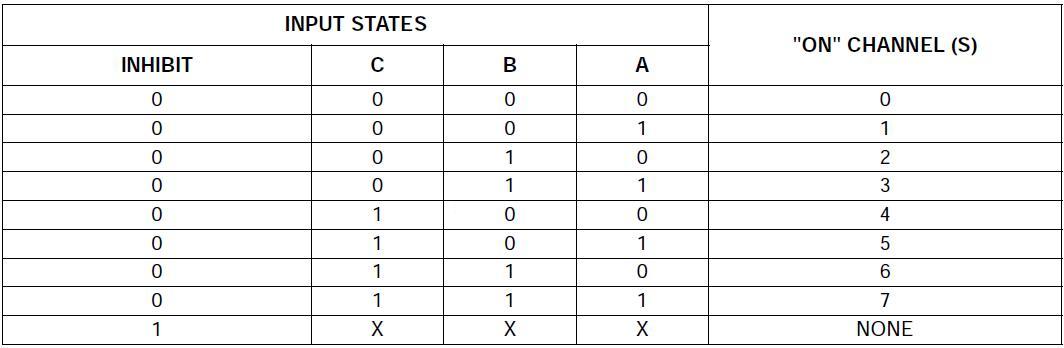 truth_table_mux
truth_table_mux
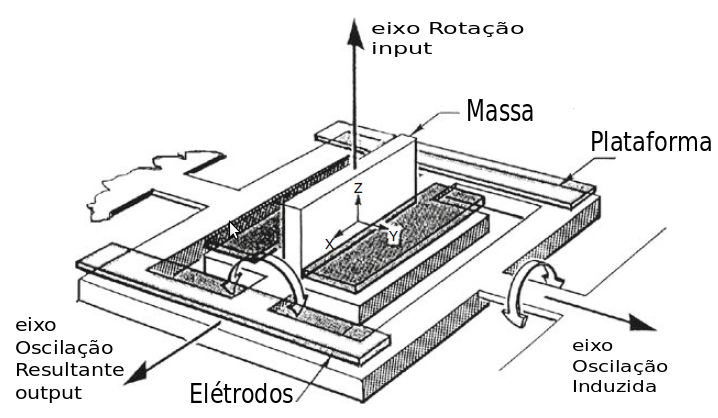 vibrating_gyro
vibrating_gyro