
0003

0005

0006

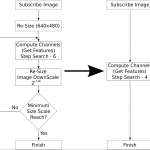
0011

0012

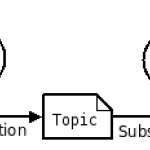
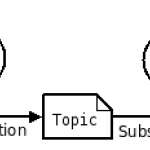
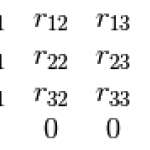
0016

005950

1803

3107

5097

732
7517
7560
7595
7649
8384
8384_outcome

AtlasCar

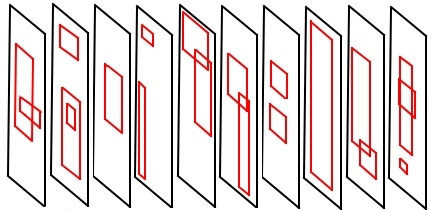
BBXB3_white_background_large
Broggi_approach_to_urban_pedestrian
Broggi_approach_to_urban_pedestrian_1

CHAO_GUAN_calibration_method

Calibracao_manual_10m

Calibracao_manual_3,8m

Calibracao_manual_6m

CoDetectionOfPedestrians

CoDetectionOfPedestrians1
Disposicao_xb3_mundo
Gidel_multilayer_laser_sensor_scheme

LAR_inside_sensor_fusion_testing_1

LAR_inside_sensor_fusion_testing_2

LAR_inside_sensor_fusion_testing_3

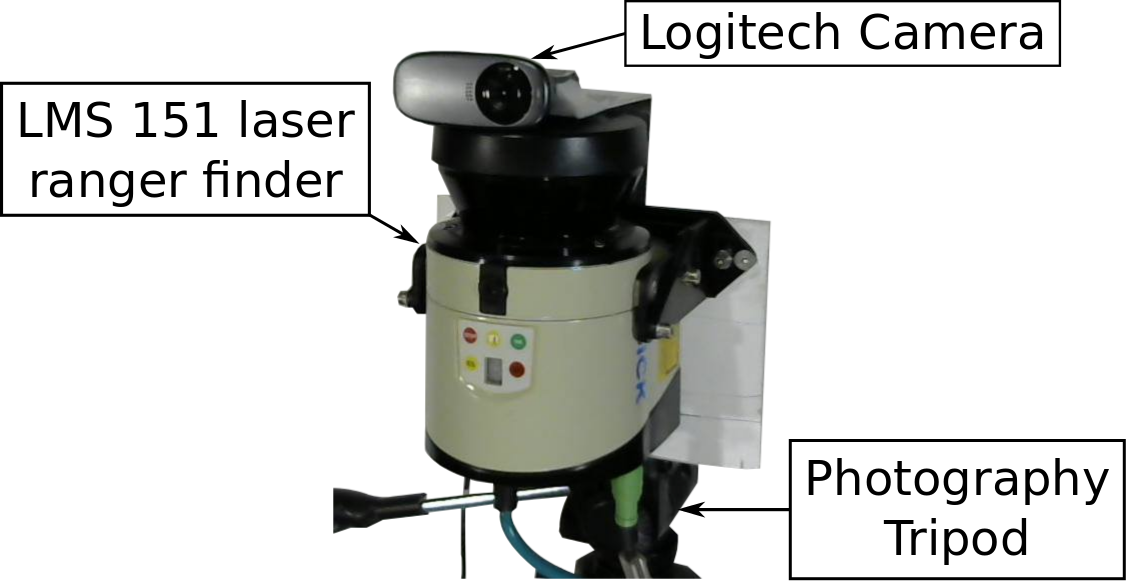
LMS151_and_logitech

LMS151_and_logitech_cutted

LMS151_and_logitech_cutted_legend

Lidar_Tracking_system_jorge

Lidar_Tracking_system_jorge_1

Lidar_Tracking_system_jorge_2
Lidar_Tracking_system_jorge_3

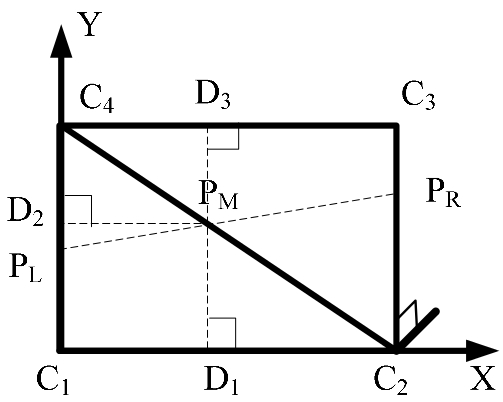
MetodoCalibracao
MetodoCalibracao_explanation

Mtt_system_jorge

OpenCV_Logo_with_text
Pedestrian_Algorithm_Detection_Scheme_1
ROS_basic_concepts_comunication
ROS_basic_concepts_comunication_1
RT_matrix

Screenshot from 2014-02-19 18_26_41

Screenshot from 2014-02-19 18_35_11

Screenshot from 2014-02-19 18_36_08
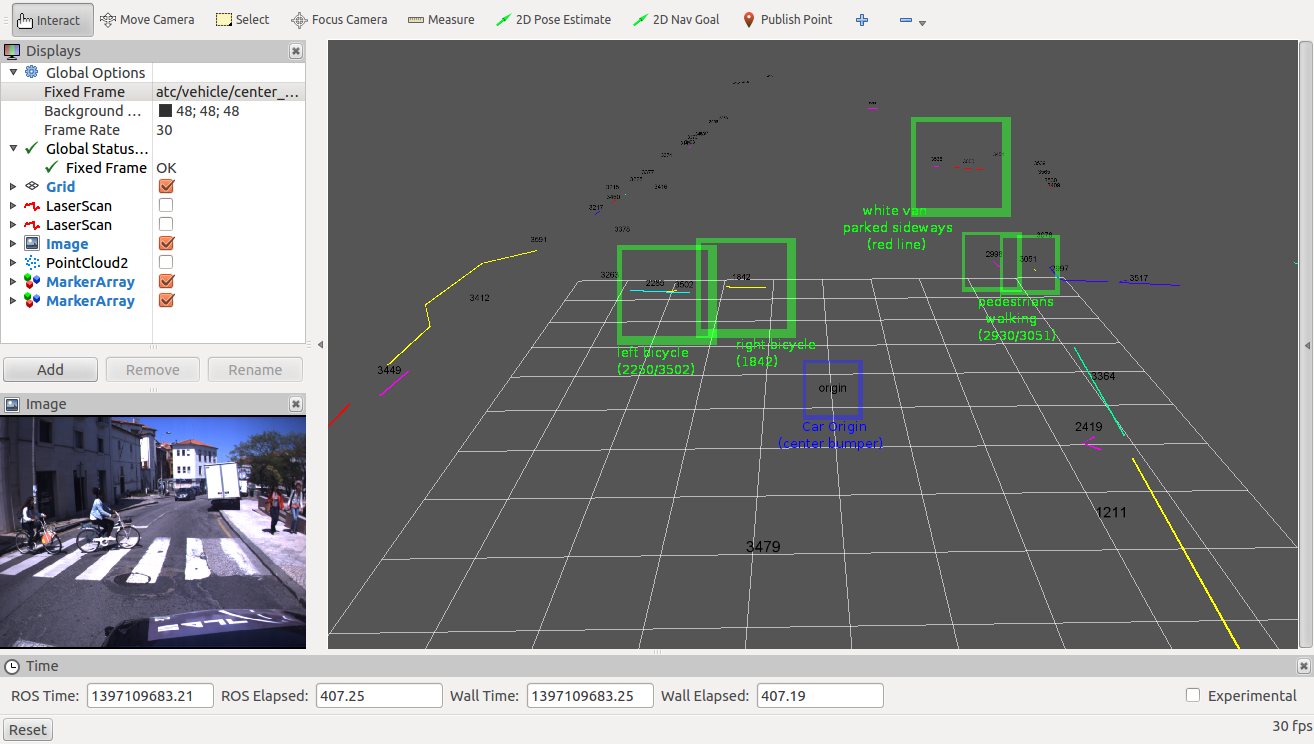
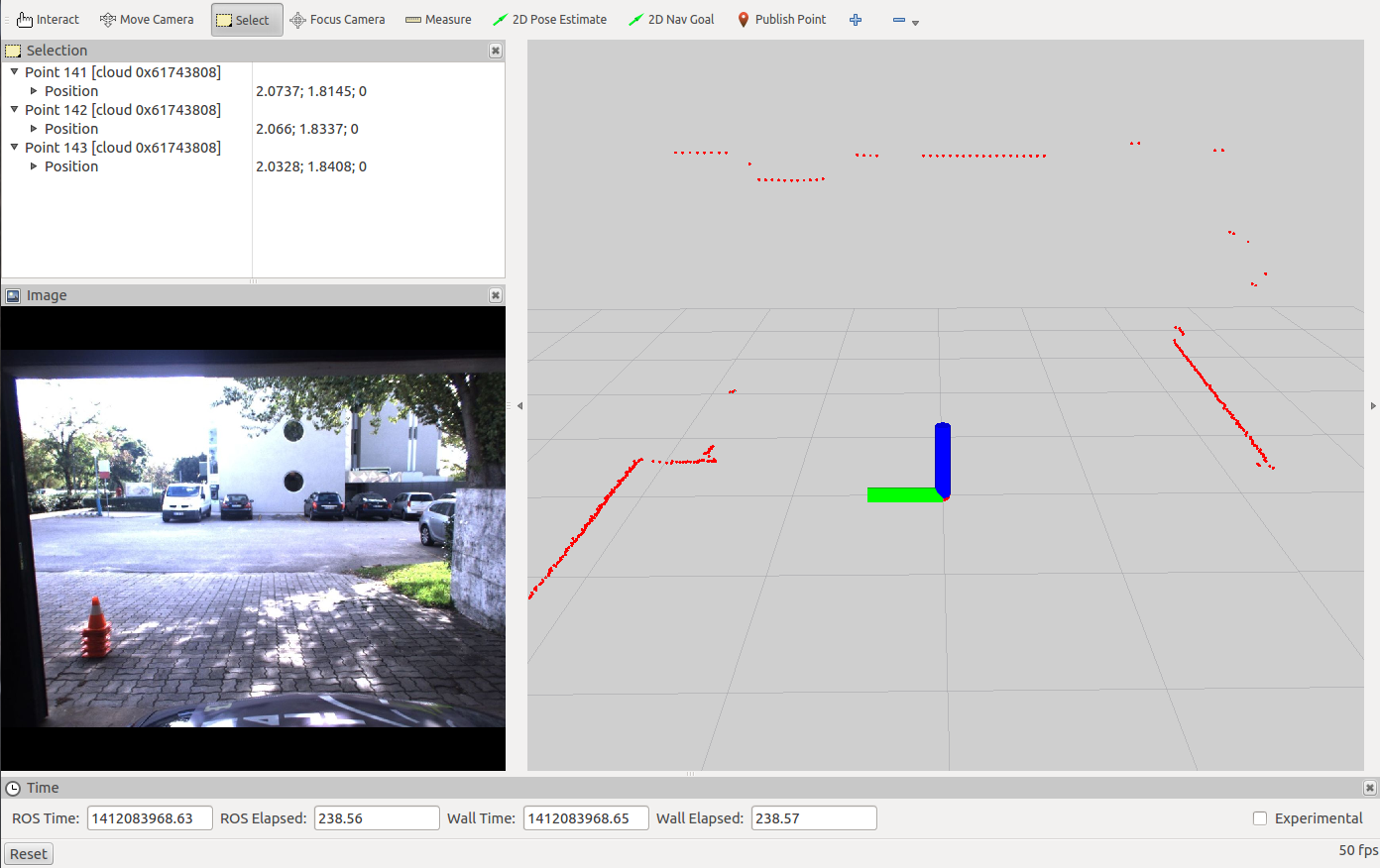
Screenshot_from_2014-04-10_07_01_23

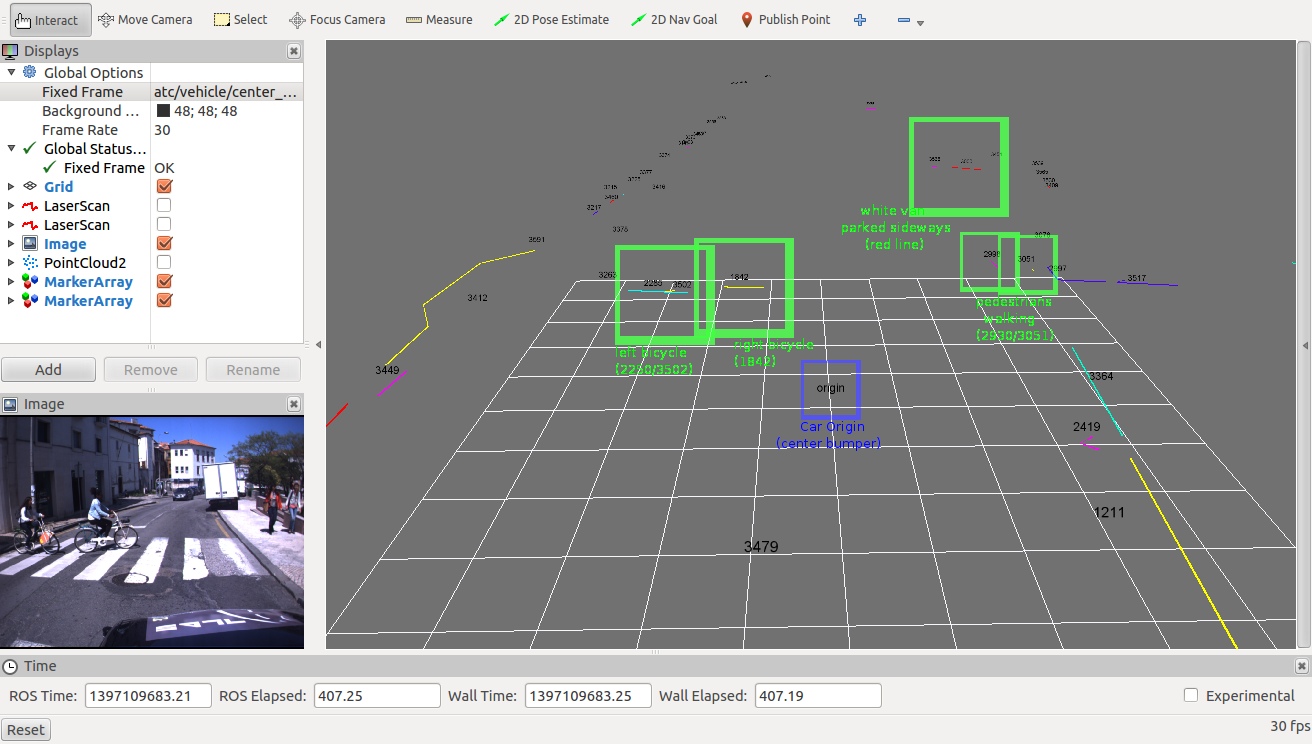
Screenshot_from_2014-04-10_07_01_23_1

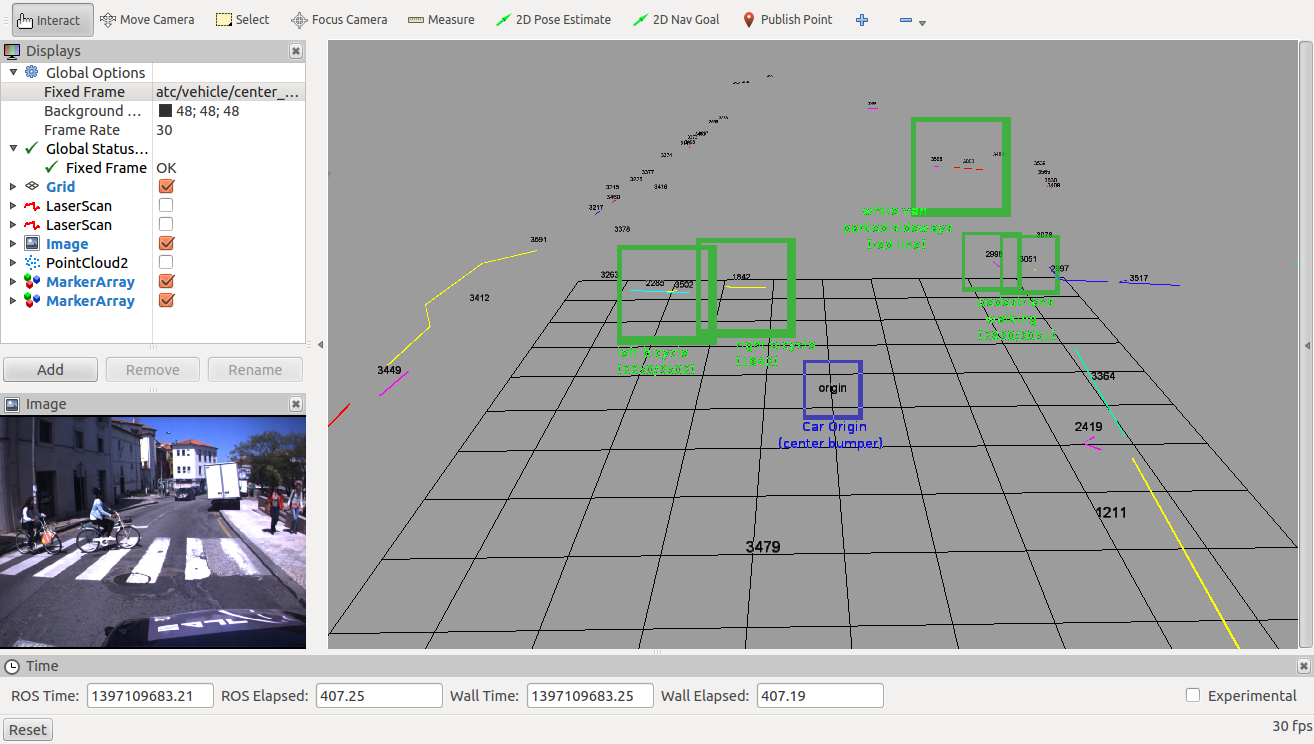
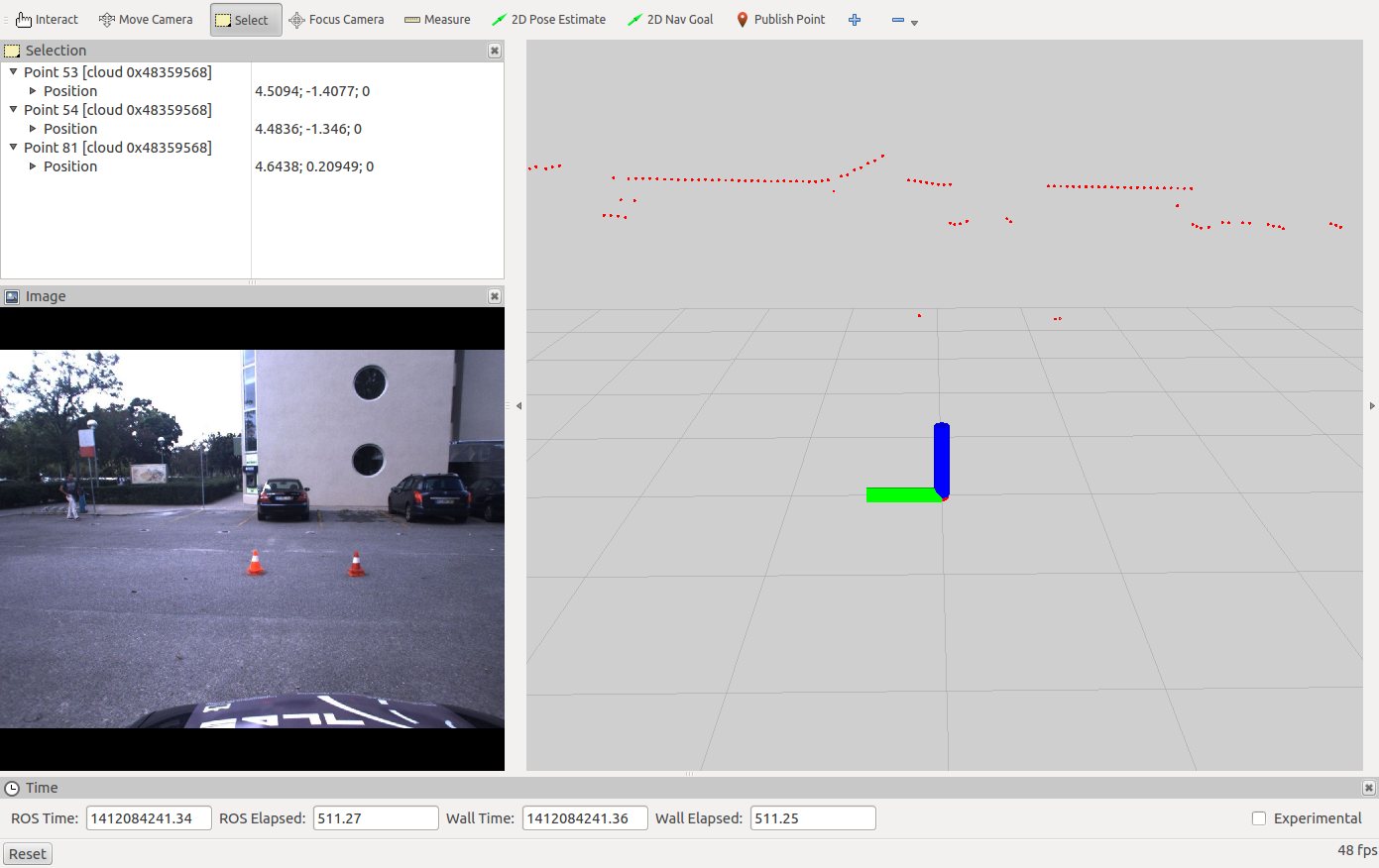
Screenshot_from_2014-04-10_07_01_23_2
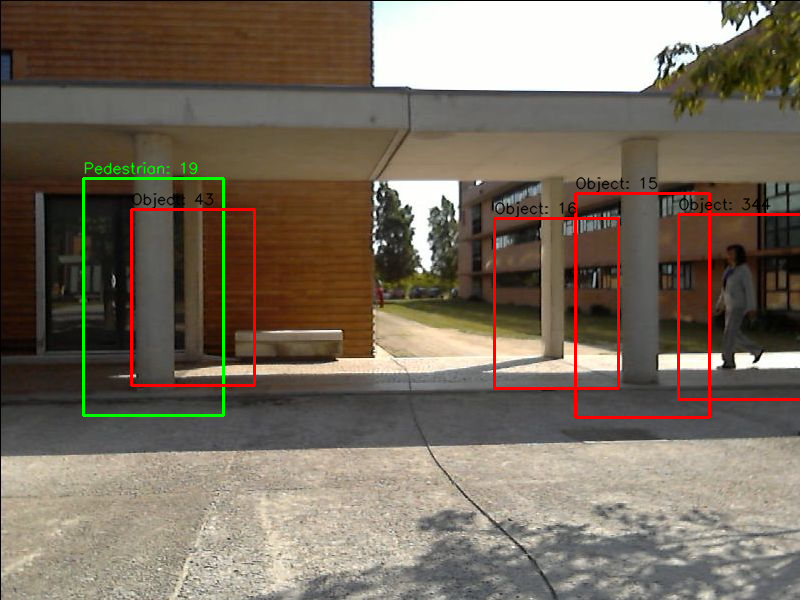
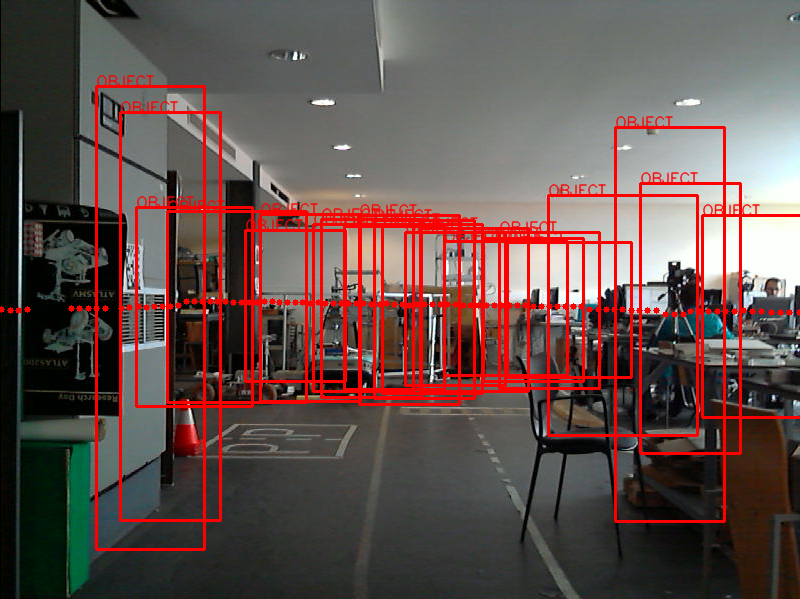
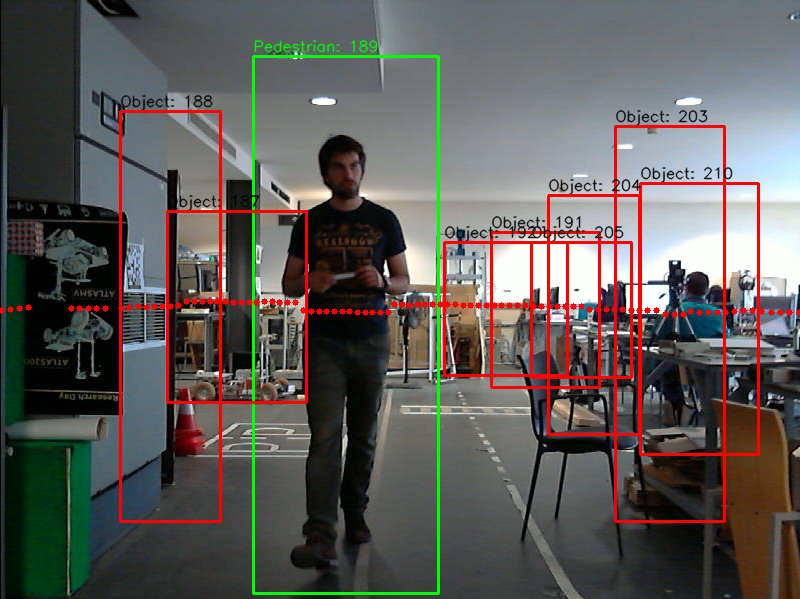
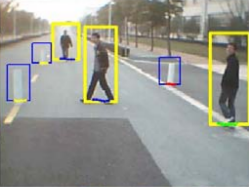
VisualDetection
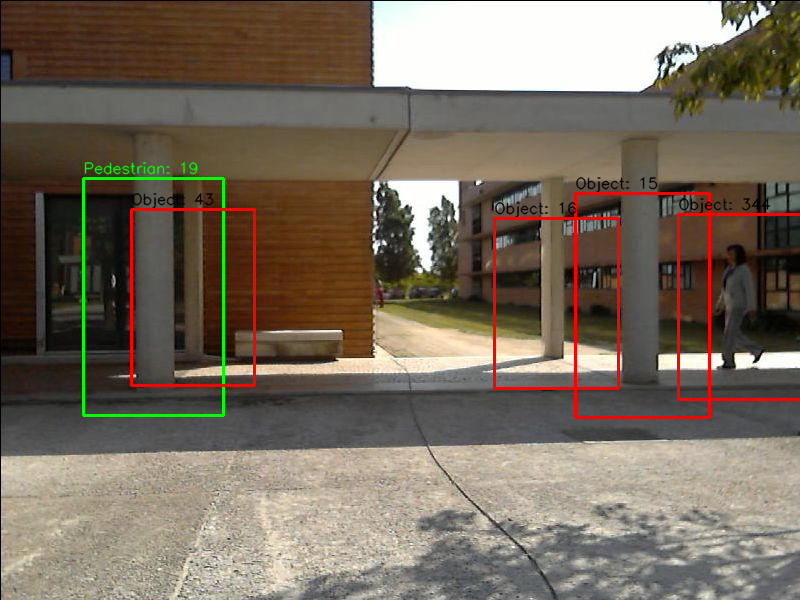
VisualDetection1

Wall_problem

Zhang_calibration_method
Zhao_object_model

aggregation_weak_classifiers_pedro

atlas2010_MV3_real1

atlascar_Frontview

atlascar_LMS151

atlascar_hokuyo_utm

atlascar_xb3

automatic_calibration_landscape_test

automatic_calibration_method_suport

automatic_calibration_method_suport_back

automatic_calibration_method_suport_front

crosswalk_outside_department

dense_image_pyramid_PDollar

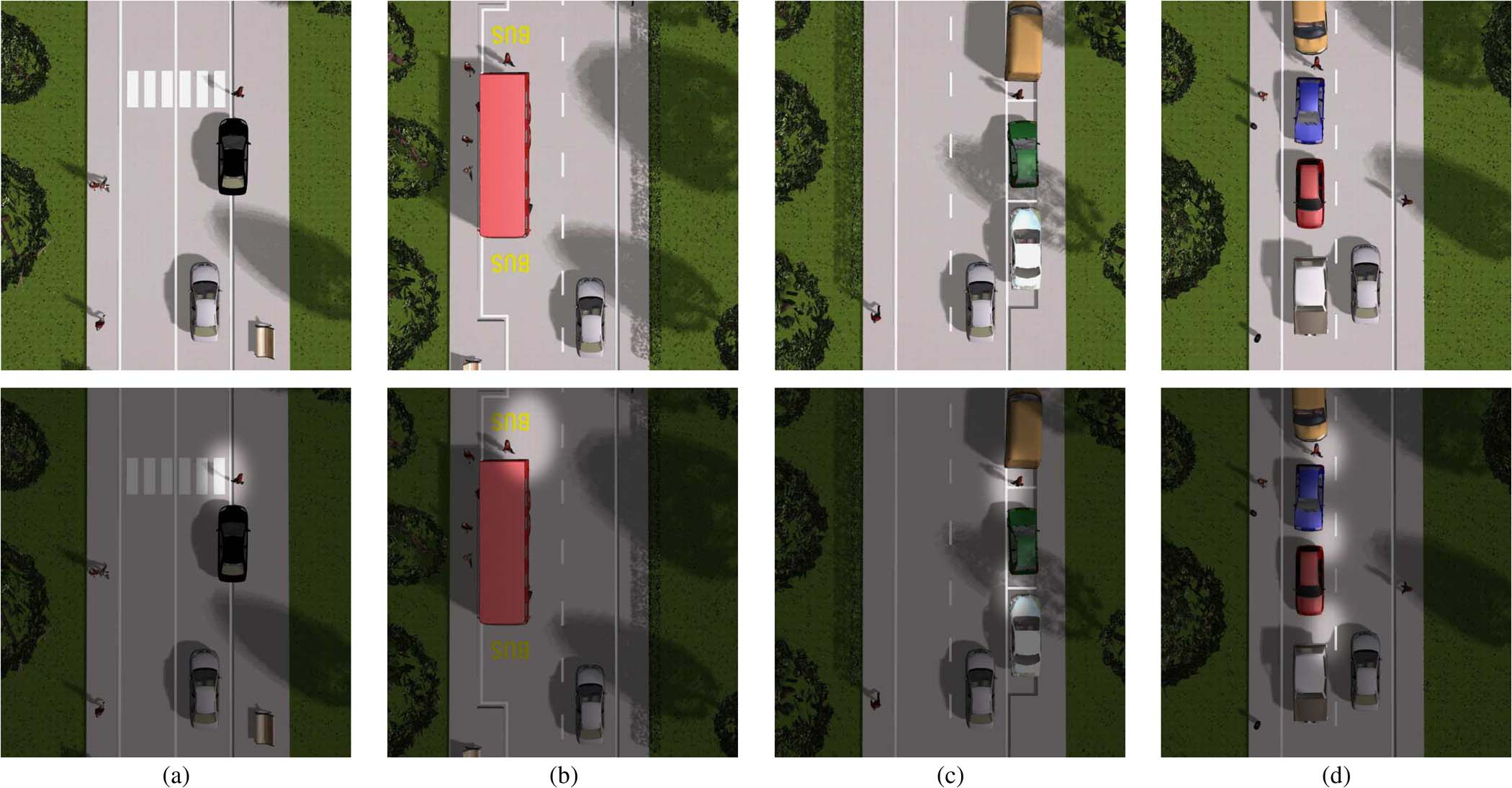
different_pedestrian_detection_aproach_a

different_pedestrian_detection_aproach_b

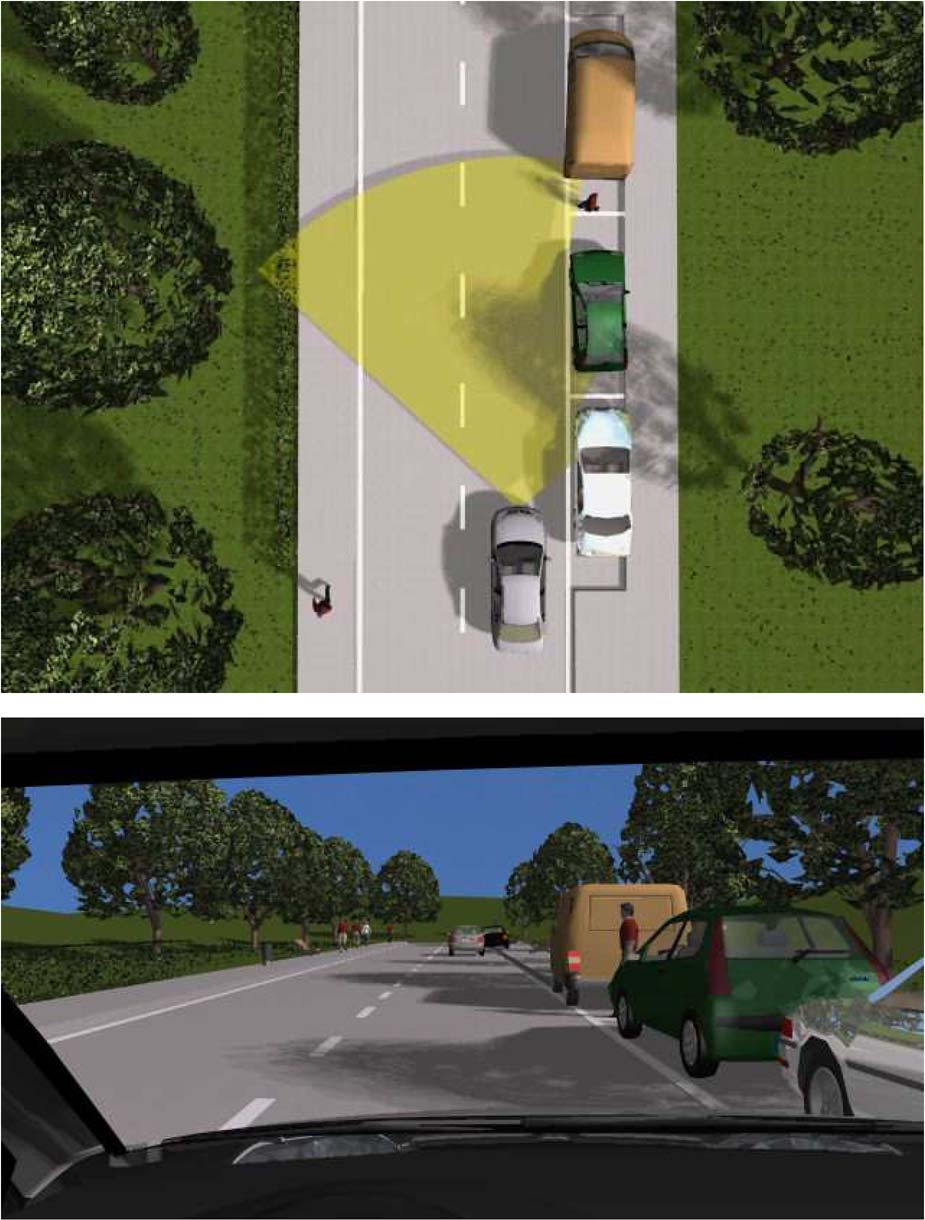
different_pedestrian_detection_aproach_c
different_pedestrian_detection_aproach_d
laipm_3

logitech-hd-webcam-c310-gallery-2
random_feature_example_pedro

rig

rviz_manual_calib_atlascar

rviz_manual_calib_atlascar_2

rviz_manual_calib_atlascar_3
rviz_manual_calib_atlascar_4

rviz_manual_calib_atlascar_5

rviz_manual_calib_atlascar_6

stereo

xb3front
 0003
0003
 0005
0005
 0006
0006
 0011
0011
 0012
0012
 0016
0016
 005950
005950
 1803
1803
 3107
3107
 5097
5097
 732
732
 7517
7517
 7560
7560
 7595
7595
 7649
7649
 8384
8384
 8384_outcome
8384_outcome
 AtlasCar
AtlasCar
 BBXB3_white_background_large
BBXB3_white_background_large
 Broggi_approach_to_urban_pedestrian
Broggi_approach_to_urban_pedestrian
 Broggi_approach_to_urban_pedestrian_1
Broggi_approach_to_urban_pedestrian_1
 CHAO_GUAN_calibration_method
CHAO_GUAN_calibration_method
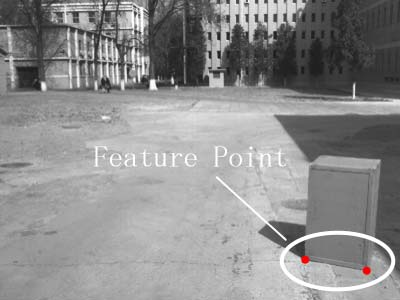
 Calibracao_manual_10m
Calibracao_manual_10m
 Calibracao_manual_3,8m
Calibracao_manual_3,8m
 Calibracao_manual_6m
Calibracao_manual_6m
 CoDetectionOfPedestrians
CoDetectionOfPedestrians
 CoDetectionOfPedestrians1
CoDetectionOfPedestrians1
 Disposicao_xb3_mundo
Disposicao_xb3_mundo
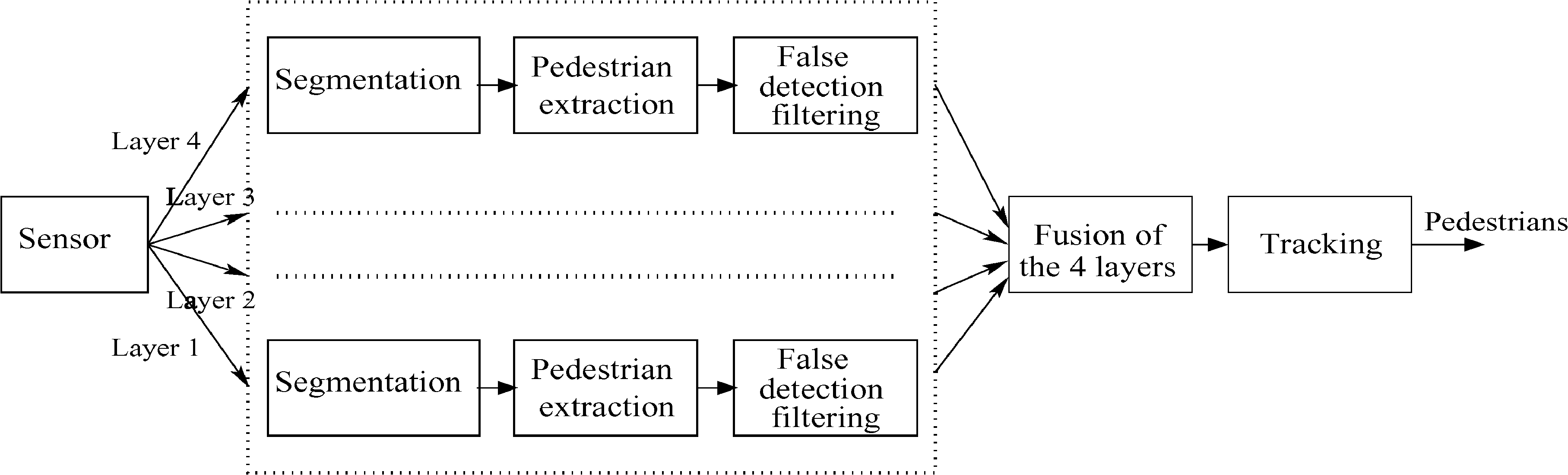 Gidel_multilayer_laser_sensor_scheme
Gidel_multilayer_laser_sensor_scheme
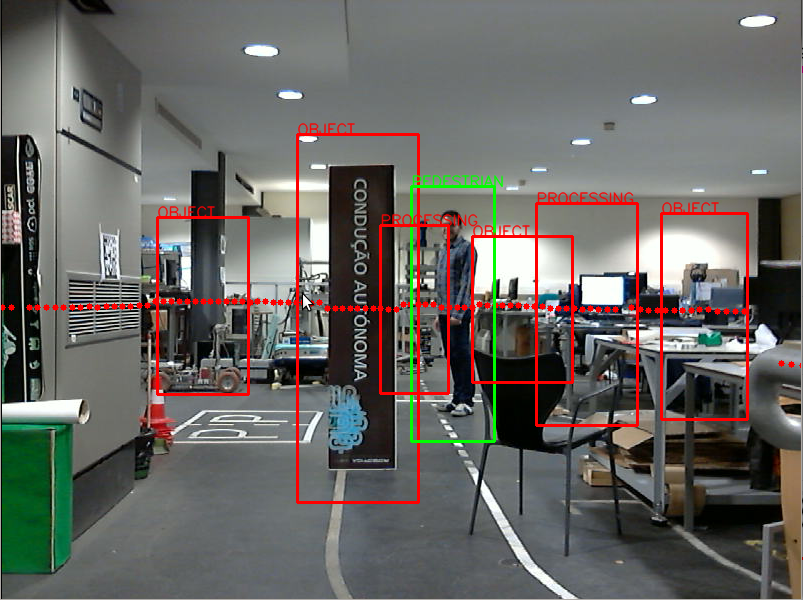 LAR_inside_sensor_fusion_testing_1
LAR_inside_sensor_fusion_testing_1
 LAR_inside_sensor_fusion_testing_2
LAR_inside_sensor_fusion_testing_2
 LAR_inside_sensor_fusion_testing_3
LAR_inside_sensor_fusion_testing_3
 LMS151_and_logitech
LMS151_and_logitech
 LMS151_and_logitech_cutted
LMS151_and_logitech_cutted
 LMS151_and_logitech_cutted_legend
LMS151_and_logitech_cutted_legend
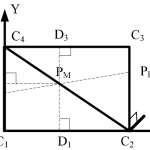
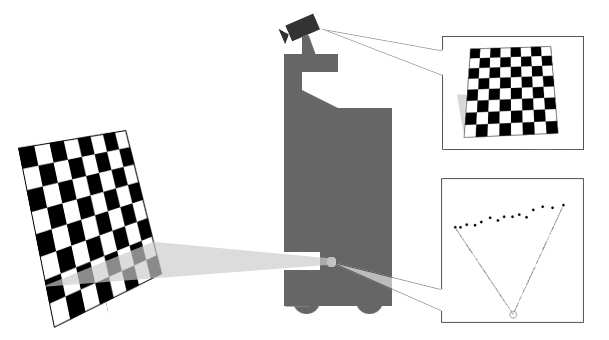
 MetodoCalibracao
MetodoCalibracao
 MetodoCalibracao_explanation
MetodoCalibracao_explanation
 Mtt_system_jorge
Mtt_system_jorge
 Pedestrian_Algorithm_Detection_Scheme_1
Pedestrian_Algorithm_Detection_Scheme_1
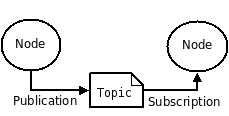 ROS_basic_concepts_comunication
ROS_basic_concepts_comunication
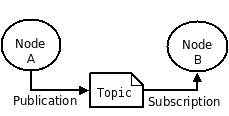 ROS_basic_concepts_comunication_1
ROS_basic_concepts_comunication_1
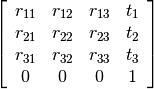 RT_matrix
RT_matrix
 Screenshot from 2014-02-19 18_26_41
Screenshot from 2014-02-19 18_26_41
 Screenshot from 2014-02-19 18_35_11
Screenshot from 2014-02-19 18_35_11
 Screenshot from 2014-02-19 18_36_08
Screenshot from 2014-02-19 18_36_08
 Screenshot_from_2014-04-10_07_01_23
Screenshot_from_2014-04-10_07_01_23
 Screenshot_from_2014-04-10_07_01_23_1
Screenshot_from_2014-04-10_07_01_23_1
 Screenshot_from_2014-04-10_07_01_23_2
Screenshot_from_2014-04-10_07_01_23_2
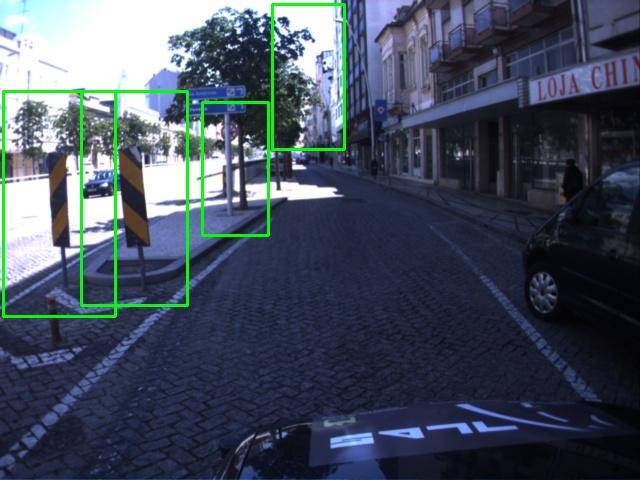 VisualDetection
VisualDetection
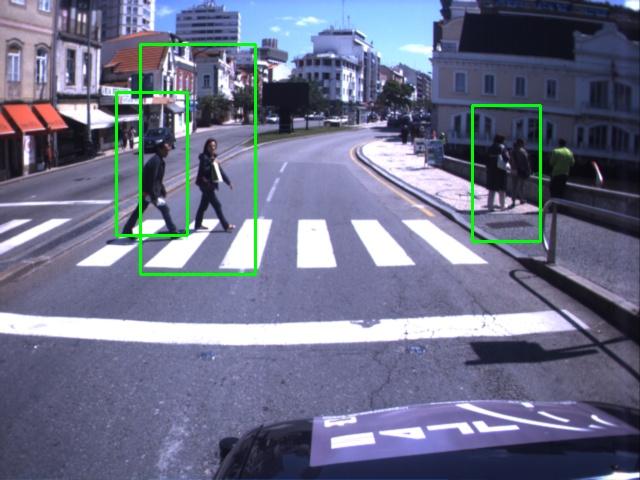 VisualDetection1
VisualDetection1
 Wall_problem
Wall_problem
 Zhang_calibration_method
Zhang_calibration_method
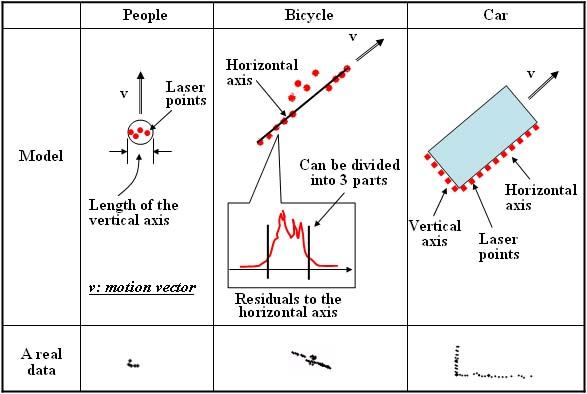 Zhao_object_model
Zhao_object_model
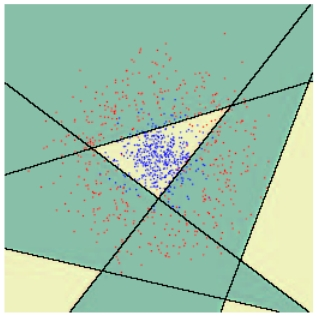 aggregation_weak_classifiers_pedro
aggregation_weak_classifiers_pedro
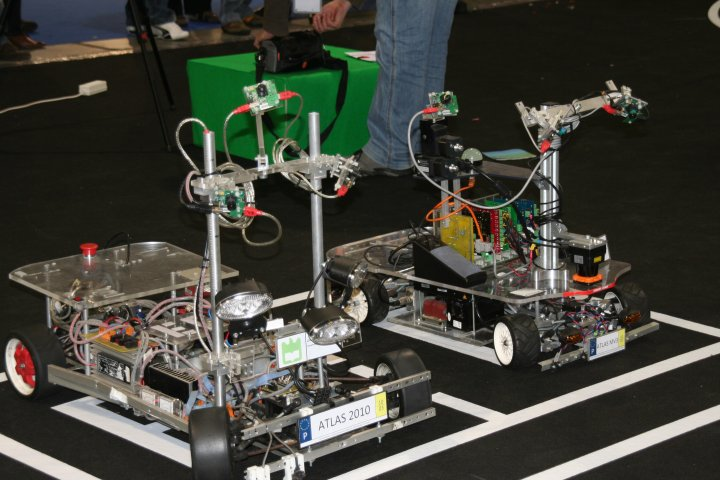 atlas2010_MV3_real1
atlas2010_MV3_real1
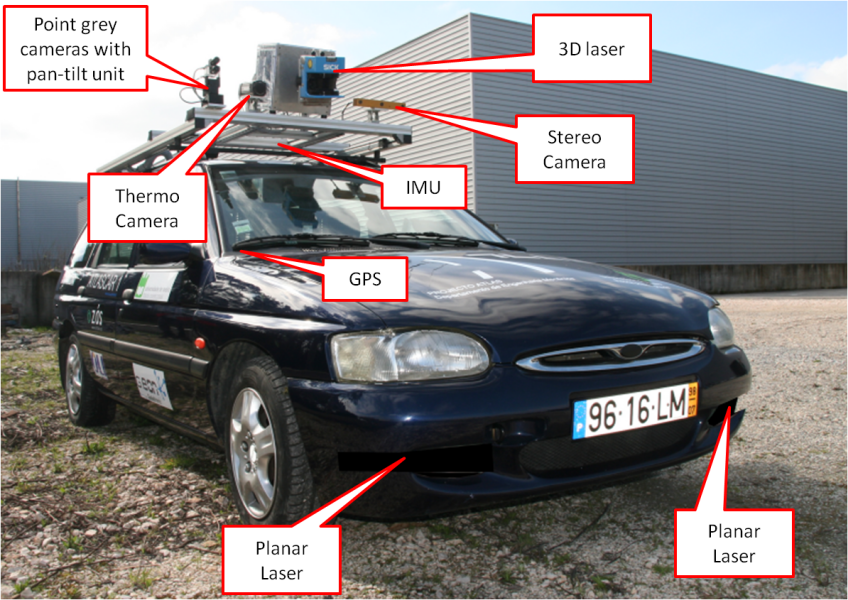 atlascar_Frontview
atlascar_Frontview
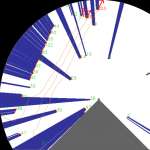
 atlascar_LMS151
atlascar_LMS151
 atlascar_hokuyo_utm
atlascar_hokuyo_utm
 atlascar_xb3
atlascar_xb3
 automatic_calibration_landscape_test
automatic_calibration_landscape_test
 automatic_calibration_method_suport
automatic_calibration_method_suport
 automatic_calibration_method_suport_back
automatic_calibration_method_suport_back
 automatic_calibration_method_suport_front
automatic_calibration_method_suport_front
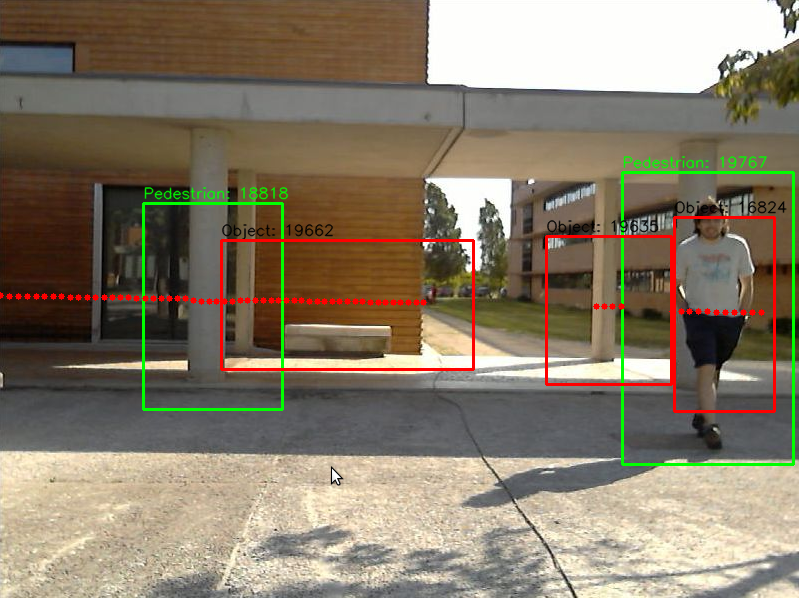
 crosswalk_outside_department
crosswalk_outside_department
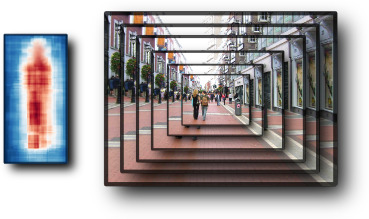
 dense_image_pyramid_PDollar
dense_image_pyramid_PDollar
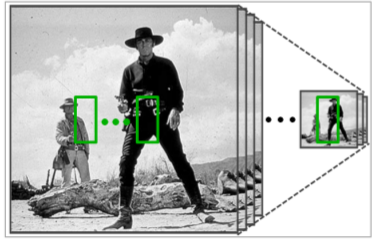
 different_pedestrian_detection_aproach_a
different_pedestrian_detection_aproach_a
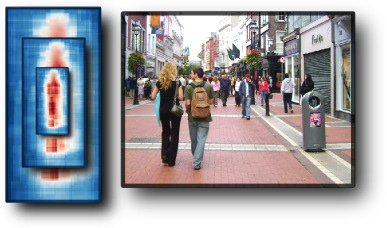
 different_pedestrian_detection_aproach_b
different_pedestrian_detection_aproach_b
 different_pedestrian_detection_aproach_c
different_pedestrian_detection_aproach_c
 different_pedestrian_detection_aproach_d
different_pedestrian_detection_aproach_d
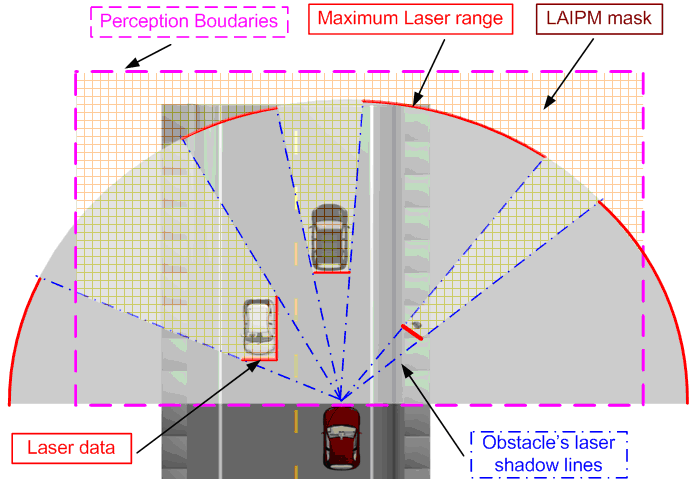 laipm_3
laipm_3
 logitech-hd-webcam-c310-gallery-2
logitech-hd-webcam-c310-gallery-2
 random_feature_example_pedro
random_feature_example_pedro
 rig
rig
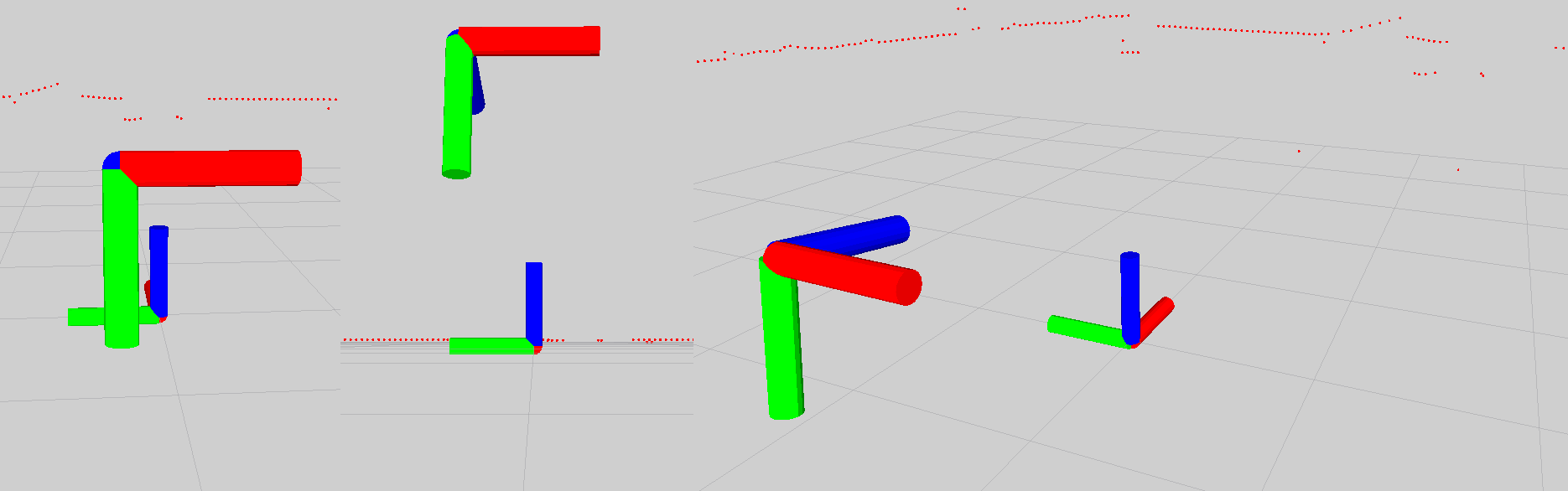
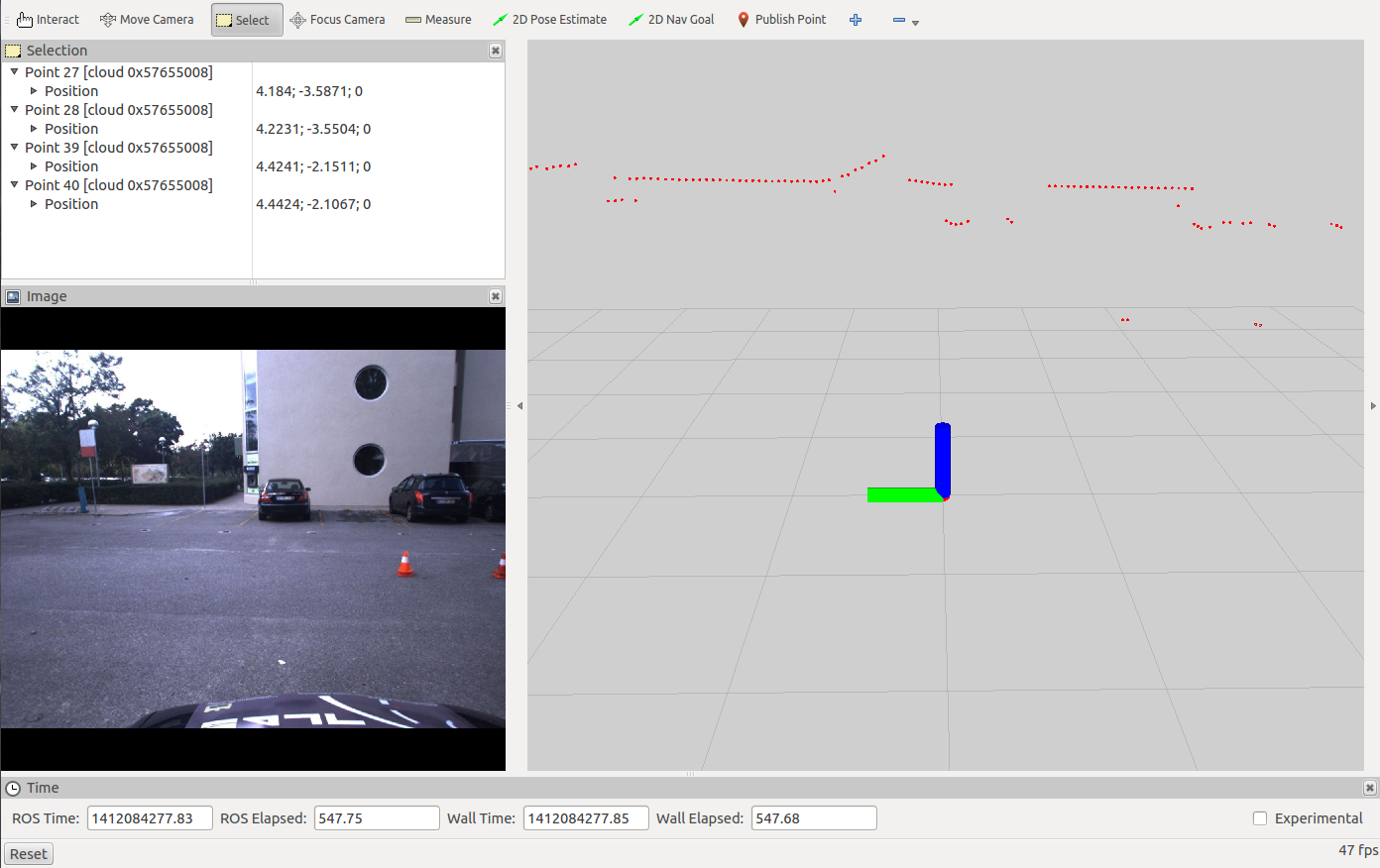
 rviz_manual_calib_atlascar
rviz_manual_calib_atlascar
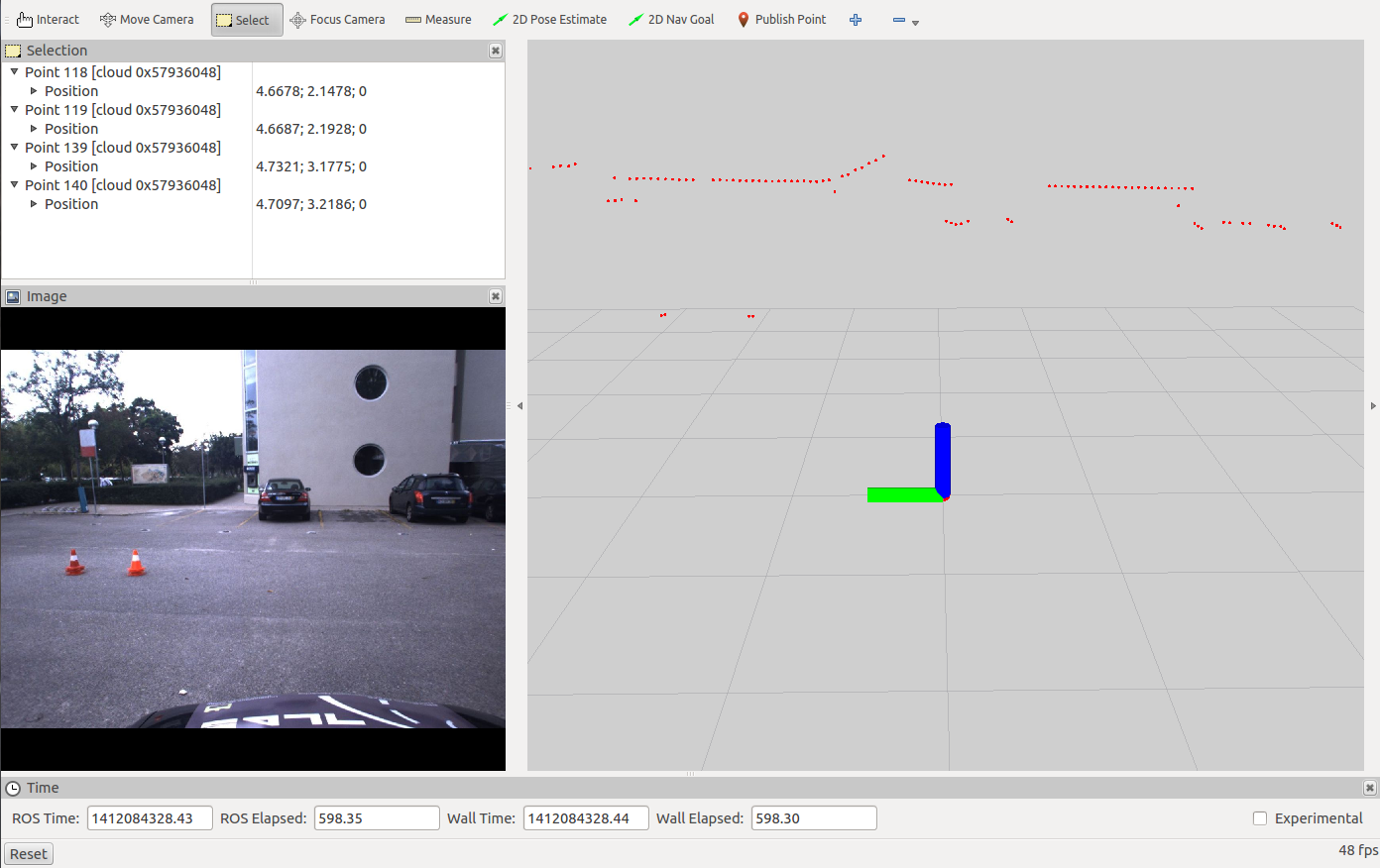
 rviz_manual_calib_atlascar_2
rviz_manual_calib_atlascar_2
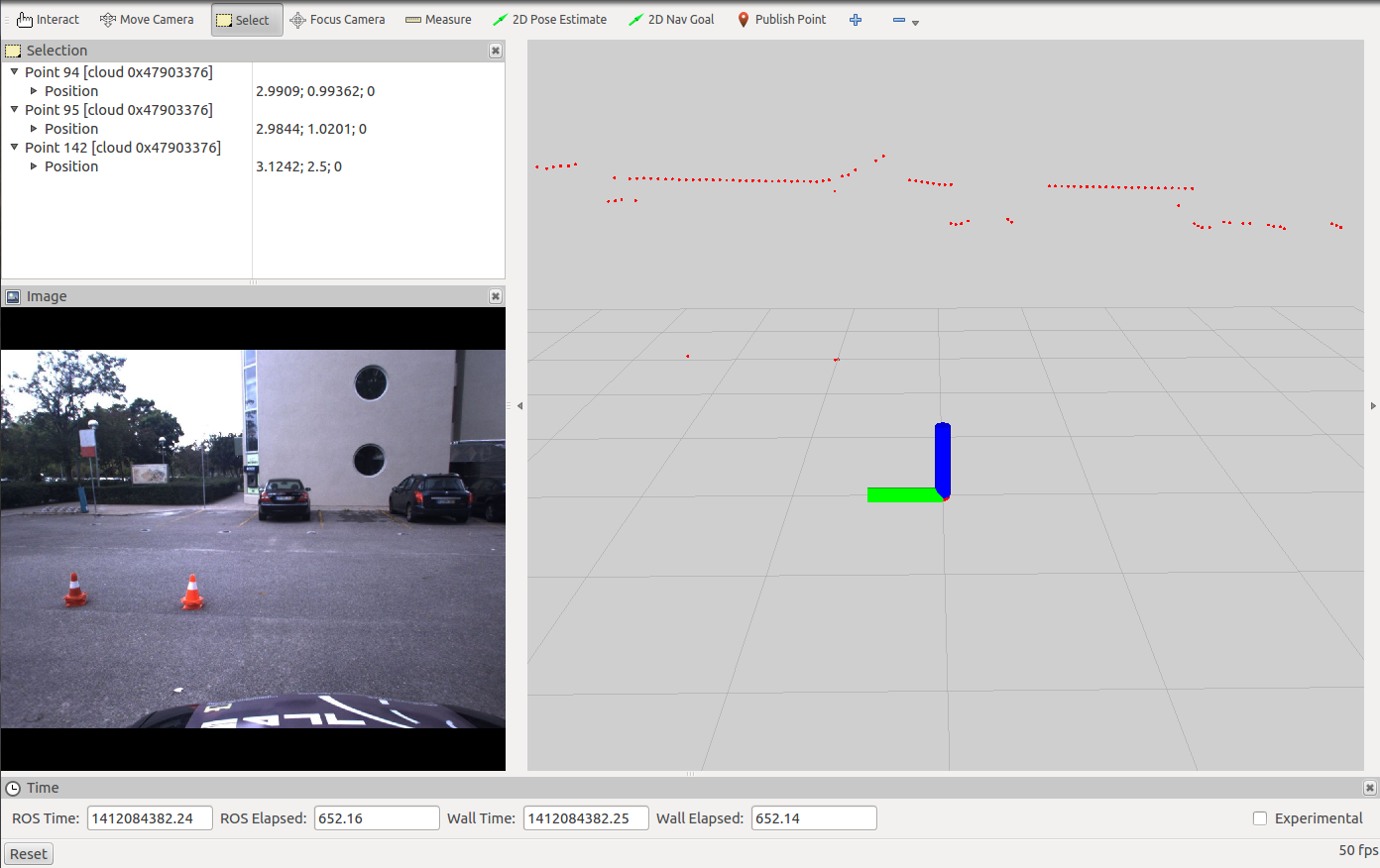
 rviz_manual_calib_atlascar_3
rviz_manual_calib_atlascar_3
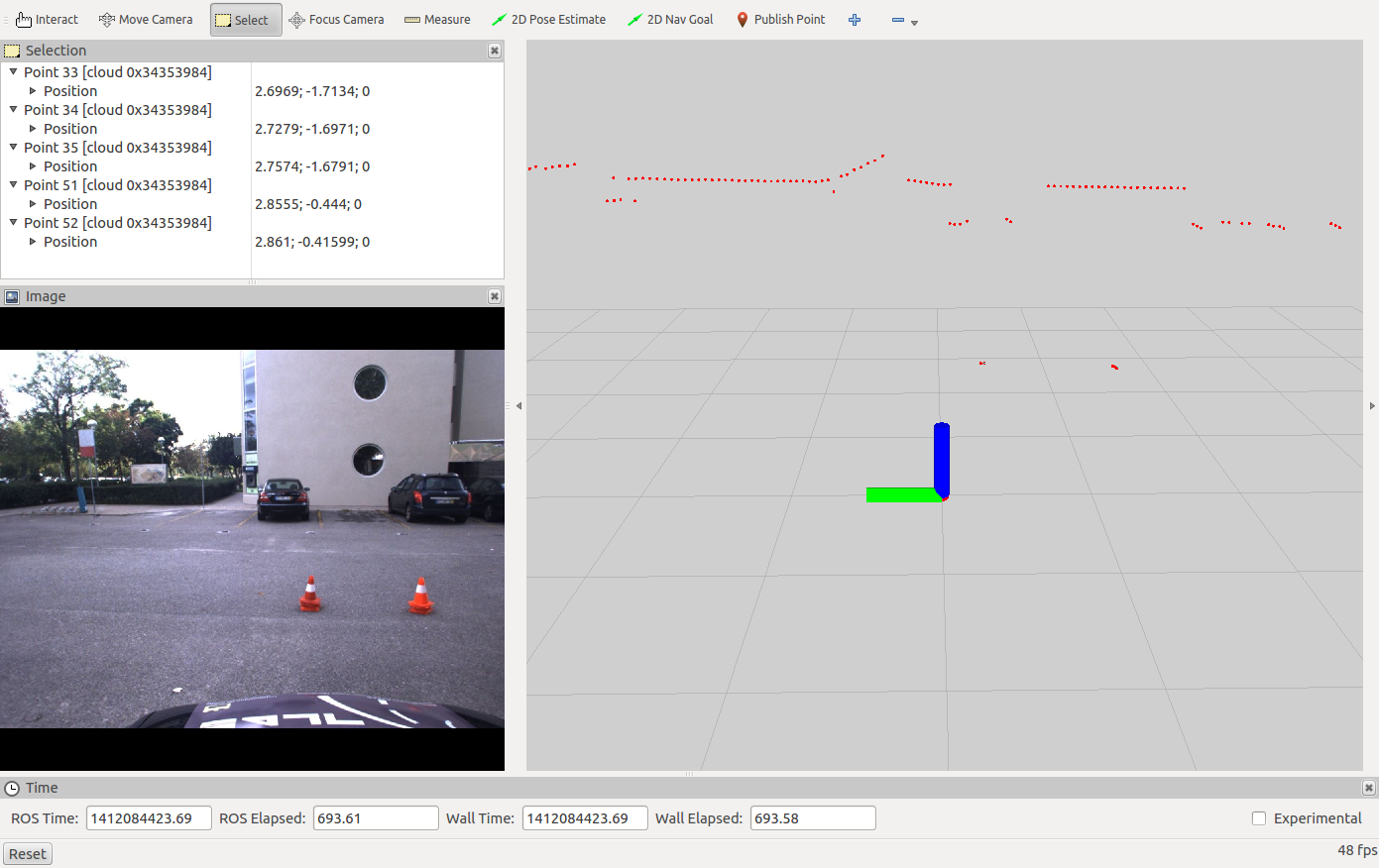
 rviz_manual_calib_atlascar_4
rviz_manual_calib_atlascar_4
 rviz_manual_calib_atlascar_5
rviz_manual_calib_atlascar_5
 rviz_manual_calib_atlascar_6
rviz_manual_calib_atlascar_6
 stereo
stereo
 xb3front
xb3front