|
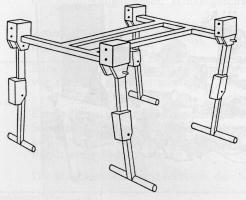
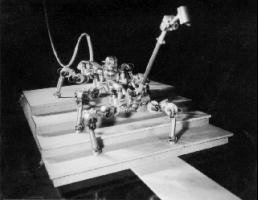
| Blueprint of Phoney Poney built in 1966. Phoney Pony was the first computer controlled walking machine created by McGhee and Frank at the University of South Carolina. (from [Todd, 1985] p.24). |
|
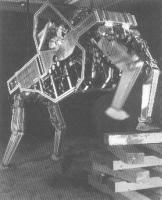
| The G.E. Quardruped, General Electric Walking Truck by R. Mosher was the first manual controled walking truck. The project was finised in 1968 (from [Raibert, 1986b] p.503). |
| \
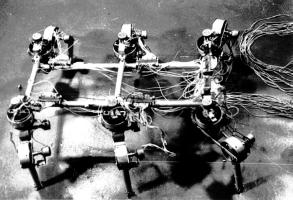
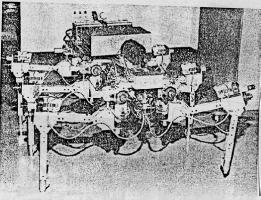
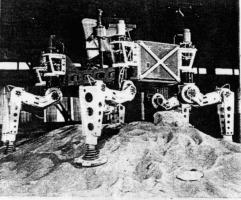
| 1973,Six-legged walking vehicle, Dr.sc.,prof. V.S.Gurfinkel, Dr.sc. A.Yu. Schneider, Dr. E.V. Gurfinkel and coll., Department of Motion control in vital systems and robotics, Institute for Problems of Information, Transmission Russian Academy of Science |
|
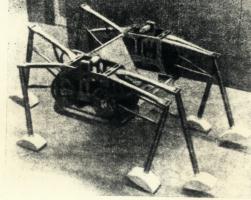
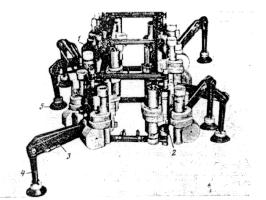
| 1977, 1. Variante Mascha, six-legged walking machine, Prof. Devjanin, Prof. Gurfinkelt, Dr. Lensky, Dr. Schneider, Koll, Institute für Mechanik Moskau Universität und Institut für Probleme der Informatinsübertragung an der russischen Akademie der Wissenschaften |
|
| 1977,"Mascha", six-le117gged walking machine, Prof.Devjonin, Prof. Gurfinkel, Dr. Lensky, Dr. Schneider, Institute for Problems of Information, Transmission Russian Academy of Science. |
|
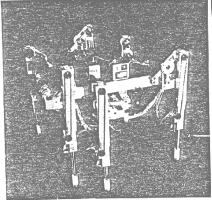
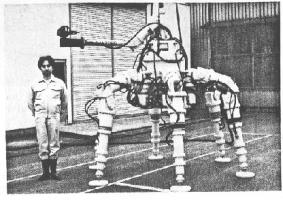
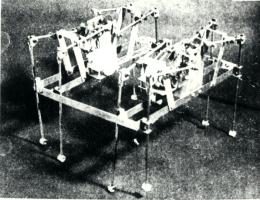
| The OSU Hexapod was presented in 1977 by McGhee at Ohio State University. Its weight is 136kg ([Ozguner et al., 1984]). |
|
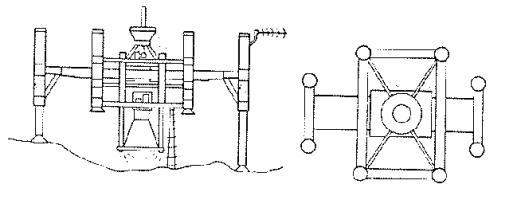
| The eight legged machine ReCUS (Remotley Controlled Underwater Surveyor) was built in 1976 to 1979 by Y. Ishino, T. Naruse, T. Sawano and N. Honma at the Technical Research Center Komatsu Ltd. Japan. The machine is about 8 m long and 6,4 m high. Its width is 5,35 m. ReCUS weighs 29 tonnes and can reach a maximum speed of 0,07 m/s. |
|
| 1979,Six-legged walking vehicle, the body lenght - 0,6m, width - 0,25m lengths of the legs 0,2m, mass of the vehicle - 40kg, Dr.M.V. Kudriavtsev, V.A.Efimov, a.f.Titov, St. Petersburg, Russia |
| The CMU Hexapod was built in the period of 1980-1983 by Southerland and Sproull. The machine is 2.4m long and reaches a max. speed of 0.11m/s ([Raibert and Sutherland, 83, Sutherland and Ullner, 1984]) |
| The name is an acronym from "Tokyo Institute of Technology, Aruku Norimono (walking vehicle)". The feet of the TITAN III are equipped with whisker sensors and a signal processing system that is made up of wires with shape memory alloy properties that have super elastic characteristics and it determines the status of ground contact automatically. Moreover, it is also equipped with a posture sensor, and is loaded with an intelligent gait control system called PEGASUS (Perspective Gait Supervisory System) for the purpose of making decisions about the sensor information in an integrated manner, and realizing terrain adaptive static walk. The length of the legs is 1.2 meters and the weight is 80 kg ([Hirose, 1984, Hirose, 1985, Yoneda and Hirose, 1992]). |

| TITAN IV was displayed at the Government Pavilion of the Science Exhibition at Tsukuba in 1985, and during the half year exhibition period it walked a total of approximately 40 kilometers continuing the round trip across a stage which had three different step levels. In addition, afterwards it also realized static and dynamic fusion gaits in which gaits were automatically switched from a static state, a crawl gait, a dynamic sta te, and a trot gait, in which it walked using two diagonal legs alternately. TITAN IV walked at a velocity of 40 cm/sec. When it enters a dynamic walk, it co nducts a left and right swing motion in which it carries the ZMP (Zero Moment Point) on the diagonal support leg line. The leg length is 1.2 m; the total weight, 160 kg. Three prototypes of this model were made at Mitsubishi Heavy Industries, and one of these runs autonomously with an on-board battery and computer ([Hirose, 1984, Hirose, 1985, Yoneda and Hirose, 1992]). |

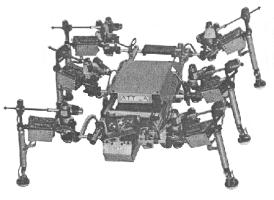
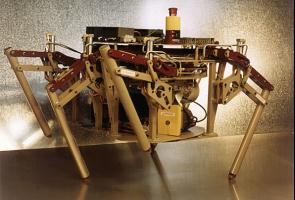
| Odex 1 was presented the first time in 1983. The hexapod was developed by the Odetics Inc., Savannah River Laboratory. (from[M.E.Rosheim, 1994]p.247) |
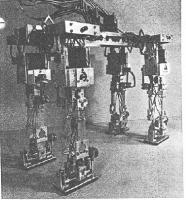
| The four legged machine Collie1 was devolped by H. Miura at the University of Tokyo. The machine has 12degrees of freedom ([Miura et al., 1985, Shin et al., 1989]). |
| The six legged walking machine Melwalk3 was developed in 1985 at the Mechanical Engineering Laboratory, Cybernetics Division, at Namiki, Tsukuba Science City, Ibaraki, Japan. It is electro motor driven, has a weight of 35 kg and is able to load 24 kg ([Kaneko et al., 1985a, Kaneko et al., 1985b]). |
| 1985,the six-legged walking machine OstRover with mass 500kg and supervisor control, developped in St. Petersburg, Russia. |
| The machine Aquarobot was developed and constructed from 1985 - 1989, at the Robotics Laboratory, Port Harbour Research Institute, Ministry of Transport, Japan ([Akizono et al., 1989]). |
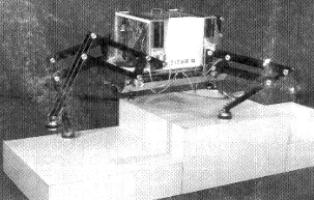
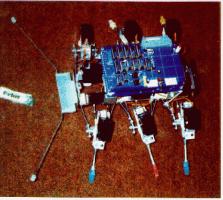
| Attila II is a four legged machine, that was developed by the research group of IS Robotics Corporation, Westlake Village, California. It is 35.5 cm long, 20.3 cm high and its width is 30.5cm. With its weight of 1,5kg it can carry a load of about 150g. ([Brooks, 1989, Dechau and Psihoyos, 1991]). |

| (1990-1994). TitanVI was prototyped for the purpose of actively running on flat ground, and on stairs up to a gradient of 40ˇ using dynamic trot walking. The height is 1.5 m; the left/right width is 1 m; the front/back length is 1.5 m; and the total weight is 190 kg. Twelve 120 W DC motors are used. The machine was planned for high speed and high output performance. A force sensor, which has non-linear characteristics, is provided on the back of the leg, to detect when the ground is touched and to simultaneously measure the support weight ([Hirose et al., 1991b, Hirose and Yoneda, 1991, ]). |
| 1993, The machine MARV was developed in the Intelligent-Autonomous-Systems-Labor University of the West of England, Bristol. |
| |

| |

| |
|
| 1993, Intelligent-Autonomous-Systems-Labor, University of the West of England, Bristol |
| 1998, Hydraumas III builded by students of Ecole de Technologie Superrieure (in Qubec) win the first price at Walking Machine SAE Decathlon. The team take 11 mounts to developped a six legs hydraulics walking machine that can carry 40kg of load. For more info about the competion see URL:http://www.wm.etsmtl.ca and http://www.wm.etsmtl.ca/competition. |

| 1998, Sir Arthur, GMD, St. Augustin, Germany. For mor information see URL: http://set.gmd.de/SET/standard/SirArthur_e.htm. |