|
ISAC is a humanoid robot that
was designed and built in the IRL as a research platform for
service robotics. The humanoid system also provides a test-bed
to develop new technologies for human-to-robot and
robot-to-human communications, including audio, visual, and
gestural methods.
Imtiaz Uddin,
Lab Manager
Dr. Kazuhiko Kawamura, Director
Dr. Alan Peters, Assistant
Director
Dr. Mitch Wilkes, Assistant
Director
|
|
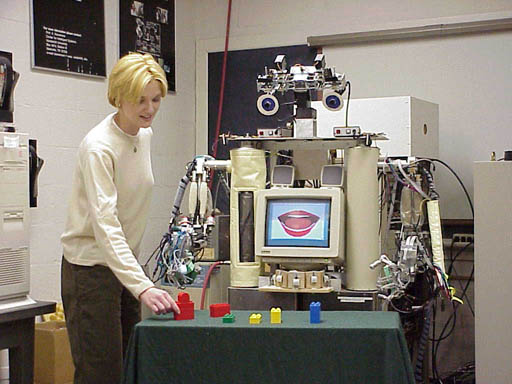
The humanoid system contains
- Two pneumatic
6DOF SoftArms actuated by McKibben artificial
muscles.
- An air
compressor and compressed air delivery system.
- Two four
fingered, anthropomorphic dexterous manipulators, that we
call the PneuHands, designed and built by the IRL.
- Two force-torque
sensors connected at the arms' wrist joints.
- A Directed
Perception pan-tilt platform modified in house for
independent verge control of two color cameras.
- Two 200 MHz Dual
processor Pentium Pros. One controls grayscale image
processing and a multi-channel audio signal processor and
the other controls the two SoftArms with two arm controller
boards (built in house).
- One 266 MHz
Pentium-II which controls hand using in-house controller
board.
- Two dual
Pentium-III with two color frame grabbers for primary image
processing.
|
|
