
This project is a testbed for various methods of powering a small robot by air. The energy source may be stored gas or via a compressor, i.e. Chemical energy storage. The point is that power is delivered to the actuators pneumatically and that power and range should be comparable to traditional battery/motor combinations. The project has currently given way to others due to time pressure. The original Zephyrus robot had several shortcomings and a successor is still yet to be built. The details are below.
Contents of this page
If you just wish to read this page sequentially then go straight to the overview.
If you wish to buy a vehicle of this type then please mail Shadow sales.
What's New
The original Zephyrus, now called Zephyrus 1, was
rebuilt using muscles as antagonistic pairs. This was for greater air
supply tolerance and ease of maintenance; it also allows for higher
pressure air and so a heavier load. Zephyrus 1 will principally be used to
test sources off board. Zephyrus 2 on the other hand will become the live
test vehicle.
The original Zephyrus is still used as a workshop
demonstrator and has a leg speed of 4.5 Hz.
General overview
The perception is that pneumatic robots are only
useful in fixed applications or when tethered to an air umbilical.
Pneumatic robotics are often associated with large compressors to maintain
the steady 3 bar or more that is often needed. This project aims to
challenge that view.
Both stored gas and compressors will be tried.
The best solution will be the one that can give up to 6 bar pressure with
1kg. or less weight. The consumption of the robot is about 80 cubic cm.
per second at 3 bar, but this can be reduced by simply allowing the robot
to walk slower. The other main consideration is cost. The target is about
900 UK pounds total sale price which limits the robot to compressors
currently on the market. The current stumbling block is still a
lightweight fixed air regulator to get us from a 50 bar CO2 cylinder to
the 6 bar region needed for the robot operation.
Physical construction
The frame is plastic construction using the polymek ®
construction kit. These materials are available in the UK via Unilab®.
Another robot, Zephyrus 2, is to be constructed from metal for
greater strength. This allows the use of more powerful actuators and so
extends the load bearing capacity.
The legs have no joints save that
to the body which have two degrees of freedom. The legs are 15mm plastic
square beam. Taken together this results in probably the simplest walker
that can be created with all of the legs active.
There is one area
where we are having unforeseen problems. The robot now goes so fast that
vibration has become a problem. We are frantically adding locking washers
as different parts work themselves loose!
Actuators
The actuators used are Shadow air muscles®, a
development of the "McKibben" muscles.

Shadow Air Muscle® (6mm)
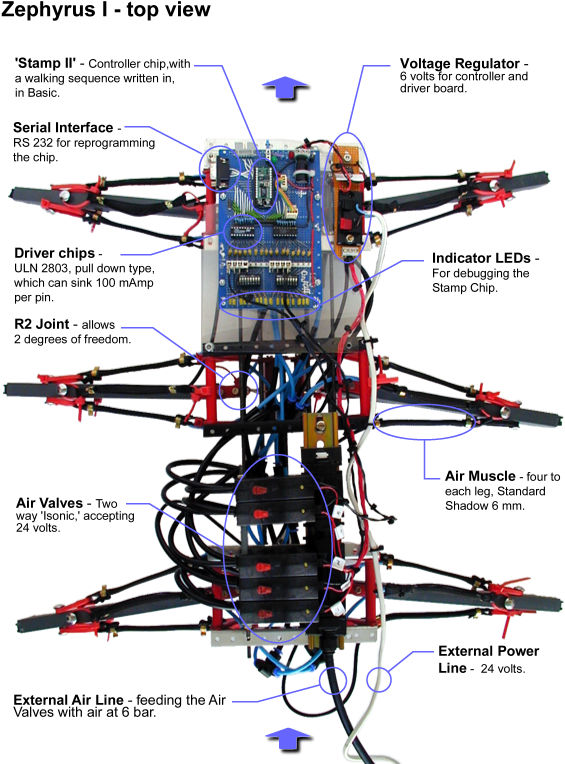
These were chosen due to their light weight, easy attachment, their ruggedness, high efficiency and high power over short distances. The 150mm by 6mm muscles were used throughout because of their much lower cost relative to the larger sizes. Twenty four muscles are now used. These are arranged in antagonistic pairs, two pairs to each leg. It is possible to run the legs from three such actuators, but with less strength and with more complicated valve arrangements. Larger diameter muscles (180 by 8) will be used in the next version of the robot, due to the higher load, also eight legs instead of six will be used. The aim is to achieve a 3kg. load. The actuators are mounted as a lever action 3cm. from the R2 pivot joint on the body. They are controlled by five 2 way "Isonic" 5 V valves available in the UK. from the Engineering research council. In order to simplify construction a single block of five 2-way valves have be used. These are driven from ULN2803 drivers which pull the valves low from a 12V rail. The 12V rail is tapped and a regulator used to generate 6V for the other electronics. If you have any information on similar performance valves, but drawing less current, an e-mail would be greatly appreciated. The antagonistic pair approach has several advantages to the elastic band returns used earlier...
- Greater tolerance to air pressure
- Ability to walk backward
- Greater stability is now achieved as muscles pull hardest when extended which was previously the least stable point.
- Ability to use higher pressures and thus increase speed (now 6 bar).
- Greater tolerance to a muscle failure.
The five 2-way valves are connected as follows...
1. Raises and lowers opposite triangles.
2.
Controls left side middle leg, forward and backward motion.
3.
Controls right middle leg, forward and backward motion.
4.Moves
forward and aft left legs forward and back.
5. Moves forward and aft
right legs forward and back.
All valves exhaust directly into the atmosphere.
The tip of the leg carves out a diamond with respect to the
body. If the up/down 2-way valve is replaced by a pair of 3/2 valves then
a distorted hexagon is produced. Much smoother. If a pair of 2-way valves
are used, then the ideal clipped triangle can be produced, greatly
smoothing the rather jerky motion. This will be one of the modifications
in the next version of the vehicle.
At present the step time is 110ms
for a 12cm. step on one side. i.e. 220ms for full step giving approx.
50cm/sec. or 1.2mph. The legs need to be properly tensioned as they thrash
about somewhat at present. A 15cm. Step at a slightly higher speed is then
possible for a speed of 1.6mph.
The next version will have several
improvements.
The walking gait is a simple double quadruped. This has
the advantage over the tripods of grater stability. The stable area for
the centre of gravity to be in is twice the size of the tripod one. Also,
the tripod gait results in half of the total weight of the robot being
placed on the middle leg during a half cycle. This situation is prevented
here. Also it increases the total carrying capacity by a third.
Electronics
The on board computer is a Stamp II controller
chip.
This processor has 16 input/output lines, 32 bytes of RAM and 2K
of EEPROM. Six of these are used to control the muscles, a further four
will be used to read simple right and left bumpers mounted at the front
and rear. It includes it's own regulator for it's own internal 5V
operation.
The isonic valves require 1.3 Watts at 12V which is too
much for the controller to supply directly. The controller outputs are fed
to ULN2803A drivers that pull the 12V line low through the valve. Sensor
inputs require no additional circuitry beyond that recommended in the
controller manual.
Sensors: Whisker or bump sensors are due to be mounted front and rear. No other sensors are planned as this is rather off topic. The Shadow project has a habit of recycling old robots, however, so this may change. Switches may be added to the feet to give feedback of the gait. The ideal would be electronic stops, making the robots behaviour robust with respect to air supply fluctuations.
Energy Sources
The energy source is the raison d'être of the Zephyrus
project. Several suggestions have been tried. Here are some of the
conclusions...
1.Air can results
2.Gas cylinders
3.Small
compressors
4.Exotic suggestions
Air can results
The first attempt of gas supply was a liquid air canister. This was rather unsatisfactory due to the tendency of the can to freeze if a large continuous draw of air was made. This prevents further evaporation. Using 15 bar "Air duster" style cans, this can take as little as ten seconds when drawing 80cc per sec at 3.5 bar. A similar try was air brush cans available from hobby shops.
Unfortunately these also have a freezing tendency. Range is about 2 metres! If the air can is warmed in a bucket of water, the robot will run for 10 minutes. at 0.6 m/sec. Clearly the robot cannot carry around a bucket of water. Reducing the flow rate is the core of this problem. With the greater carrying capacity of Zephyrus 2 it is hoped to carry four such cans. Zephyrus 2 uses at least twice the air of Zephyrus 1, but by lowering the speed some sort of performance should be possible.
Gas cylinders
Gas cylinder options are many. The gas can be stored
as liquid or solid. Storing as a gas seems either too clumsy due to the
amount needed or too dangerous with a high pressure.
Candidates are...
Solid carbon dioxide
Acts as an insulator
preventing further evaporation.
Liquid carbon dioxide
Requires a 50bar storage
cylinder, but fast.
Clean air
Provides low cost, but needs a high
pressure cylinder.
At the group we have an 1800 litre, 50 bar CO2 cylinder. It only costs 7 uk pounds to recharge from BOC. The next experiment will be to continually run Zephyrus 1 until this cylinder is useless. This crude test will give us our first real data point for future designs. Note that liquid CO2 gives about five times the capacity of the gaseous state even though the cylinder can only hold about 40 percent of it's volume in the liquid state for safety reasons. A paintball gun cylinder will be built into Zephyrus 2.
Small compressors
A small diaphragm compressor and battery have been
tested. This means that the ultimate energy source is electrical, thus the
problem becomes the old one of batteries. At present Zephyrus 1 is too
weak to carry a full load of batteries for the compressor. Alterations in
the design are being attempted as a stopgap whilst Zephyrus 2 is built.
The existing design will then function as a measuring tool for gas
supplies.
Exotic options
I have received many curious suggestions from the
Internet. Unfortunately I have not logged the originators of these ideas
for which I apologise. These include...
Hydrogen peroxide - A bit dangerous and not much gas
produced.
Beer brewing kit - A bit too much of the by-product I think.
Thanks for these and keep 'em coming. Please Please mail me if you have any other suggestions or applications for this research.
Mapping
There is currently no map building strategy. A simple
wall following strategy will be implemented initially. Other (more
complex) strategies will be studied later, but I am still open to any
e-mailed ideas. Bear in mind that the Stamp II only has 32 bytes of RAM
and 2k of EEPROM.
As the only sensors to be fitted so far planned are
bumpers, the robot will have to follow the wall by repeatedly ramming it.
Upon hitting the wall, the robot will turn and attempt to hit the wall
again. In failing to do so, it will be following the wall. After a
timeout, it will head toward the wall again. The turn angle and time-out
depend on the odomotry errors from the robot movements. If anyone has any
better strategies or references to some, please mail me. Any ideas on
simple sensors that could revolutionise this approach will also receive
grovelling thanks.
© The Shadow Robot Company 1999