
PLATE-FORME ROBOTIQUE
![]()
CONSTITUTION
La plate-forme Robotique est essentiellement composée de systèmes à muscles
artificiels pneumatiques et mécanochimiques. Le but visé par ces muscles
artificiels est de donner aux robots-manipulateurs une souplesse articulaire
comparable à celle du corps humain tout en développant une puissance suffisante
à la motorisation de robots de taille comparable à celle des robots industriels
usuels. Nos efforts se sont particulièrement portés sur les muscles artificiels
pneumatiques dit de McKibben qui apparaissent actuellement comme les muscles
artificiels les plus intéressants pour la Robotique. Cependant, la 'compliance'
naturelle de ces actionneurs à muscles antagonistes a pour contre-partie une
forte non-linéarité de fonctionnement qui en fait un système dynamique très
spécifique nécessitant la mise en oeuvre de commandes particulièrement robustes.
A ce titre nous avons développé et validé la commande d'un premier prototype de
robot à deux degrés de liberté et un prototype de bras anthropomorphe à 7 d.d.l.
entièrement motorisé par muscles artificiels est en cours de développement.
The robotic platform is essentially comopsed of pneumatic artificial
muscle systems. Thanks to these muscles the robot-arm get a joint compliance to
be compared to this of human joints. The power of these muscles is well adapted
to the motorization of robot-arms. Our work privileges the McKibben artificial
muscle which presently appears like the best one for Robotics. However the
natural compliance of the McKibben muscle actuator has a main drawback, its
high working non-linearity which implies a specific robust control. We
have applied a sliding mode approach to the control of a two degrees of freedom
robot prototype. A seven degrees of freedom anthropomorphic robot arm entirely
actuated by McKibben artificial muscles is in progress.

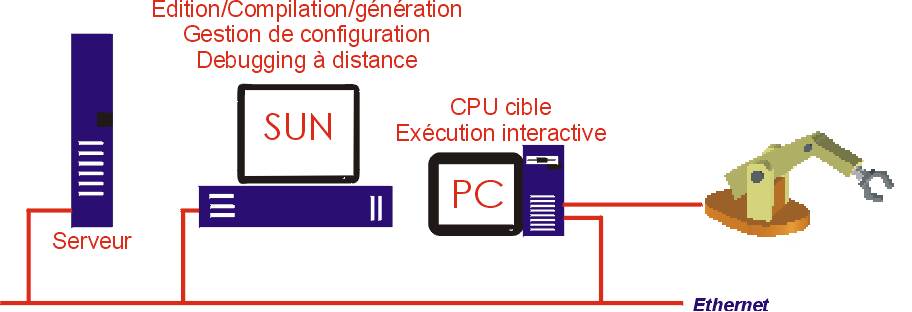
Le contrôleur est implanté sur un PC sous le système d'exploitation
Vxworks. Le développement du
programme et la mise au point s'effectue sur
une station sous UNIX avec l'application Tornado. La
transmission du
programme compilé se fait par le réseau.
The controller is implemented on
a PC using the Vxworks system.
INTERETS
Outre la possibilité d'utiliser ces muscles artificiels comme des systèmes
dynamiques validant des approches non-linéaires originales, on cherche à travers
cette motorisation copiant celle du corps humain à participer au développement
d'une Robotique de Service apte à travailler en présence et
coopération avec
l'homme.
This actuation type aims at developping a Service Robotics able
to work in cooperation with the human operator.
CONTACTS
| Plate-forme de Robotique | Bertrand
Tondu : (33) 05-61-55-98-40 mailto:tondu@dge.insa-tlse.fr |
![]()