| En
esta sección os vamos a contar como desarrollamos el "Proyecto
Stiquito". Ayudados por unos manuales en inglés, comenzamos la
construcción de nuestro pequeño robot de seis patas.
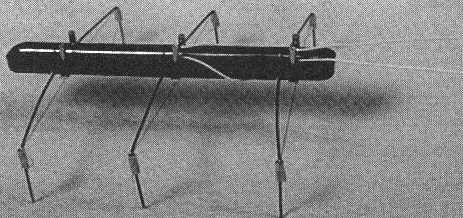
El robot construido es muy simple. Consiste en un cuerpo de plástico con seis patas de metal. Es más, para simplificar aun más el experimento solo utilizamos tres alambres que atravesando la pieza de plástico nos daban como resultado las seis patas.
|
|
|
|
|
| El
movimiento de las patas iba a ser cruzado. La primera y la última de
un lado se moverían a la vez que la pata situada entre las de los
extremos del otro lado. La única finalidad de mover las patas de
esta manera es evitar que el "insecto" diese "cabezazos" al caminar,
o sea, intentamos que tratase de seguir una línea lo mas recta
posible sin que vaya haciendo zig-zag. De todas formas, el
movimiento de las patas se puede hacer de la forma deseada sin
ningún tipo de problema.
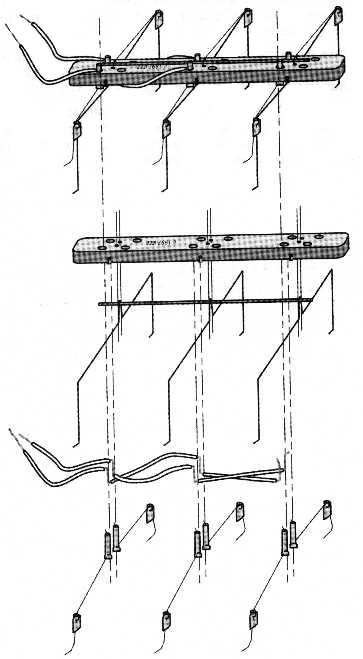
Como íbamos a mover las patas de tres en tres, solo nos hacían falta dos cables para hacer llegar la corriente eléctrica a las patas. Aquí surgía un problema ya que el alambre que componía cada una de las patas era el mismo que el de su simétrica por lo que al hacer llegar corriente eléctrica a una llegaría también a la otra. Para evitar esto, había dos posibles soluciones. Una era cortar los alambres por la mitad y la otra era enviar la corriente a tierra justo cuando fuese a llegar a la otra pata. Para adoptar la segunda solución, lo único que necesitamos hacer era colocar una pieza de metal con mayor masa que las patas justo en la mitad de cada pata, con lo que colocamos una varilla metálica a lo largo de todo el cuerpo de plástico del exápodo que contactaba con el metal de las patas justo en su punto medio. Con el esqueleto ya hecho, colocamos hilos de Nitinol (aleación de niquel y titanio) desde el cuerpo del insecto al codo de cada una de las seis patas, dejando estas un poco arqueadas como consecuencia de la tensión del hilo. Esta iba a ser la clave del movimiento, que los hilos de Nitinol estuviesen a la misma tensión en cada una de las patas. Para unir el hilo de Nitinol a las patas, no podíamos emplear soldaduras porque con el calor del soldador el Nitinol se contraía y era imposible la unión, así que hicimos las uniones mediante el aplastamiento de tubos de metal, dentro del cual habíamos introducido previamente el alambre que formaba la pata y el hilo de Nitinol.
|
 |
|
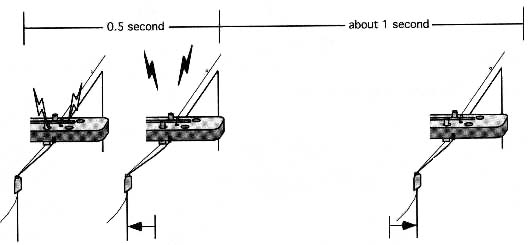
El funcionamiento del robot es muy simple. Al hacer llegar electricidad a la pata, el metal de que está compuesto esta se calienta, lo que provoca que el Nitinol se caliente también y este, al calentarse, se contrae y provoca el movimiento al hacer que la pata se doble. El Nitinol no conduce electricidad. La corriente eléctrica se puede hacer llegar en forma de pulsos al robot de forma manual, mediante un circuito integrado que haga el reparto de pulsos a las distintas patas de manera equitativa o mediante un programa en ensamblador a través de una tarjeta de entrada/salida.
|
|
|
|
|
©
Copyright eitig.com
1999-2000
Resolución recomendada: 800 x 600
webmaster@eitig.com