Projecto de Automação e Seminário de
Processos Tecnológicos
Robucar
Ó-
Estrutura Multi-terreno com Acoplamento Automático para um Robot
Móvel
Este
trabalho foi desenvolvido no âmbito da disciplina de Projecto de
Automação / Seminário de Processos Tecnológicos da Licenciatura
em Engenharia Mecânica da Universidade de Aveiro com o nome de Robucar
- Estrutura Multi-terreno com Acoplamento Automático para um Robot
Móvel.
O
robot móvel em questão, Robuter III
é uma plataforma robótica autónoma de elevadas capacidades.
Uma das suas principais limitações é o seu uso inadequado
para a navegação em ambientes não laboratoriais. Algumas experiências
em pavimento
de calçada (pavimento com alguma irregularidade)
ilustraram a violência que sofre toda a estrutura devido à sua
rigidez, o que é particularmente delicado para os sistemas electrónicos
a bordo, como seja disco rígido de um PC, entre outros.
O objectivo
foi conceber uma estrutura com acoplamento automático, para
que seja possível a navegação do robot em ambientes exteriores.
Características
do Robuter III:
-
Peso:
+ 150 kg
-
Capacidade
de carga: + 120 kg
-
Velocidade:
5 cm/s até 1.25 m/s
-
Motores:
2´300
W, DC
-
Transmissão:
diferencial, com velocidades relativas nas 2 rodas independentes
O peso actual do robot
do DEM da UA ronda os 180Kg porque lhe foram adicionados alguns
equipamentos como por exemplo um PC, um laser, entre outros.
Especificações
principais da estrutura RobuCar:
-
Suportar
um robot com ±130
Kg em velocidade nominal de 0.6 m/s com máximo de 1 m/s em
piso com irregularidade típica de calçada, e acidentes de
relevo ocasionais com altura de 5 cm.
-
A
estrutura a construir deve ser passiva
-
Dotado
de suspensão ou sistema de amortecimento tal que não permita
acelerações danosas para um disco rígido de PC.
-
Unidade
de acoplamento às rodas motrizes do robot com relação de
transmissão de 1:1, permitindo o movimento nos dois sentidos
e independente nas duas rodas permitindo o direccionamento do
robot usando rodas dianteiras livres.
-
Capacidade
de formação de um plano inclinado, para a
elevação e a descida do robot < 20º (devido há
falta de binário instantâneo disponível no robot)
à custa de uma unidade motorizada.
-
A
unidade deve depois permitir ser colocada numa geometria de
segurança para a fixação do robot e para o movimento
propriamente dito.
-
Deve-se
ter um bloqueio automático da transmissão na subida ou
descida
-
Na
posição de descida, a transmissão da tracção não pode
ocorrer para permitir ao robot desacoplar-se e sair da
estrutura.
Após
varias idealizações e alguns estudos efectuados, como por
exemplo a forma e as forças envlovidas no sistema de elevação
ou ainda a forma da propria rampa para permitir a transmissão da
tracção do robot para a plataforma, chegou-se a uma solução final
que vêm dar resposta a todas as
especificações anteriormente descritas.
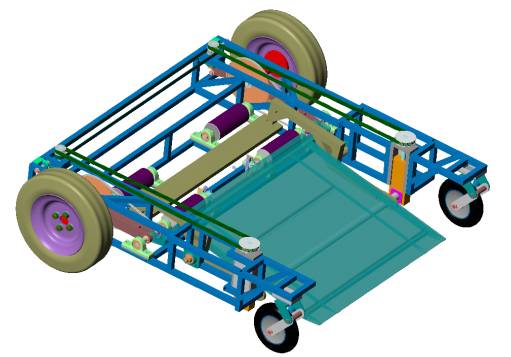
A
estrutura apresentada anteriormente foi modelada no SolidWorks. O
recurso a catálogos de componentes já existentes no mercado foi
uma das principais prioridades na idealização deste modelo,
tentando desta forma minimizar o numero de peças a
realizar. Foram realizados algumas análises estruturais
estáticas a componentes como por exemplo a estrutura de suporte
exterior (chassis) , rampas para a elevação do robot para
se prever os valores das tensões
e deformações em diferentes tipos de
solicitação.
Para
além da componente estrutural foi também realizado uma
pequena parte de automatização do processo onde se utilizam
sensores indutivos, fotoelectricos, solenoides, um motor de
corrente continua e uma UPS, permitindo deste modo que o robot
possa de uma forma autónoma subir e descer da plataforma.
Para
se compreender o processo de acoplamento automático do robot à
plataforma apresenta-se em seguida uma breve descrição de
todo o processo: O robot aproxima-se da estrutura através da detecção de
duas hastes, que irão servir como guia na fase de aproximação e
de subida da plataforma. Estas hastes serão colocadas na parte de
trás da estrutura. Após esta fase de aproximação o robot
começará a subir a rampa até se colocar integralmente em cima
desta activando automaticamente o processo de subida da rampa.
Este processo terminará quando o robot assentar em cima dos rolos
de tracção. O conjunto robot/plataforma estará assim pronto
para iniciar a navegação em ambientes exteriores sendo todo o
controlo efectuado por o robot recorrendo aos seus meios de
navegação.
