Concepção:
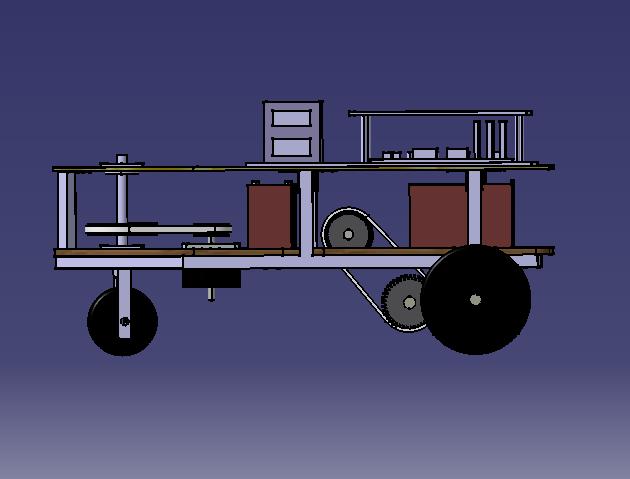
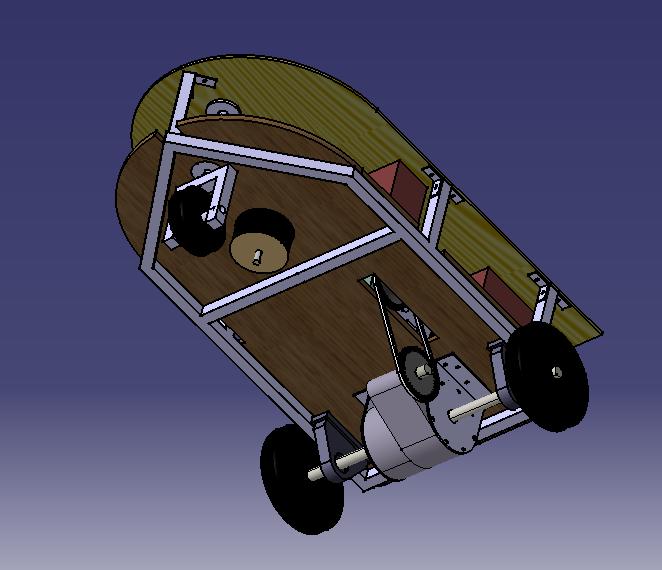
A geometria e design do robot, assentam numa forma ovalada, ou rectangular arredondada numa das extremidades, em que a estética foi um dos aspectos levados em conta.
As dimensões físicas do robot estão limitadas pela largura da pista e pelos momentos resultantes com um centro de massa condicionalmente rebaixado em relação ao solo.
Os materiais utilizados para a construção do robot foram madeira (nos pisos), alumínio com ligações soldadas (para a estrutura), material compósito (para os casquilhos das rodas e calços das chumaceiras) e aço para os suportes do diferencial e do motor de tracção.
O sistema de tracção é independente do sistema de direcção, havendo para o efeito um único motor de tracção. Este sistema é mecanicamente mais complexo, uma vez que obriga ao uso de um diferencial mecânico, mas permite uma distribuição de peso mais flexível, sendo os momentos de inércia muito menos relevantes neste caso, com a direcção à frente e outro motor exclusivamente para garantir a direcção do robot.
Esta é também uma ideia inovadora e aliciante devido ao desafio imposto.
O motor escolhido para a tracção é um MAXON RE40 com uma potência de 150W debitada às 7580r.p.m., com um binário de 181mN.m e uma caixa redutora de 1:15, sendo a redução total de 1:30, uma vez que o diferencial mecânico tem uma redução de 1:2.
Na disposição dos componentes, uma das prioridades foi a localização do diferencial, devido à sua massa e importância mecânica, sendo os restantes elementos colocados em função do mesmo, atendendo à minimização do espaço disponível e à localização do centro de massa.