
ENQUADRAMENTO
q A
concepção de um Robot Humanóide constitui um dos maiores desafios na área da
robótica:
Ø Construir
um ser artificial semelhante ao homem é um sonho inato
Ø Marcas
como a Sony ou a Honda já deram os primeiros passos
q Um
projecto de colaboração entre o DETI e o DEM, iniciado em 2003, permitiu a
construção de uma plataforma humanóide de baixo custo para a realização de
investigação em áreas tão diversas como o controlo, a percepção e a navegação
OBJECTIVOS
q Este
projecto visava o desenvolvimento e implementação de um conjunto de módulos de
hardware e software a testar na plataforma Humanóide, sendo decomposto nas
seguintes fases:
1.
Desenvolvimento dos módulos de
comunicação entre os diversos componentes da arquitectura distribuída de
controlo
2.
Desenvolvimento e implementação de
estratégias de controlo a adoptar na actuação das juntas (controlo em posição e
velocidade)
3.
Implementação de um exemplo de controlo
local baseado em sensores de força nos pés (equilíbrio sobre um plano de
inclinação variável)

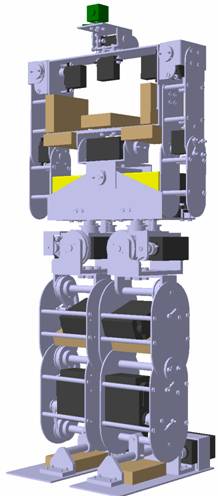
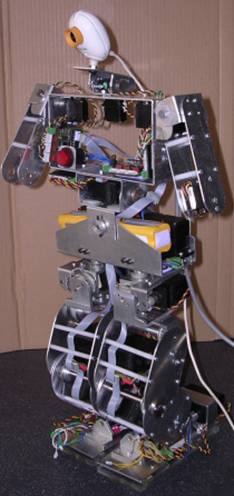
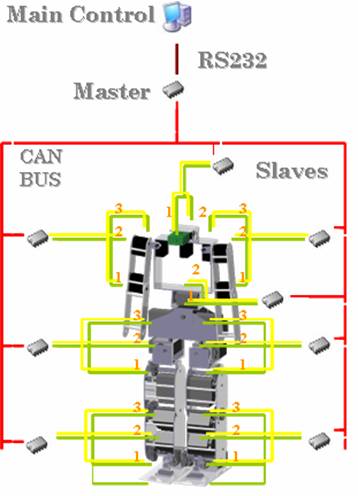
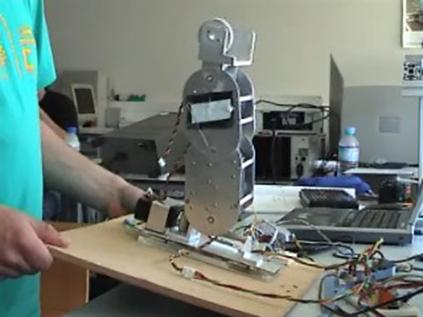
Modelo 3D (esquerda), implementação
(centro) e arquitectura distribuída (direita) do robot
q
Plataforma humanóide
Ø
22 graus de liberdade
Ø
Peso:
Ø
Altura:
q
Arquitectura distribuída
Ø
Rede de controladores interligados por CAN-bus
Ø
Configuração Master/Multi-Slave
q
Comunicações
assíncronas:
Ø
Master e Slaves: CAN
bus a 1 Mbit/s
Ø
Master e PC: série
RS232 a 115 Kbaud
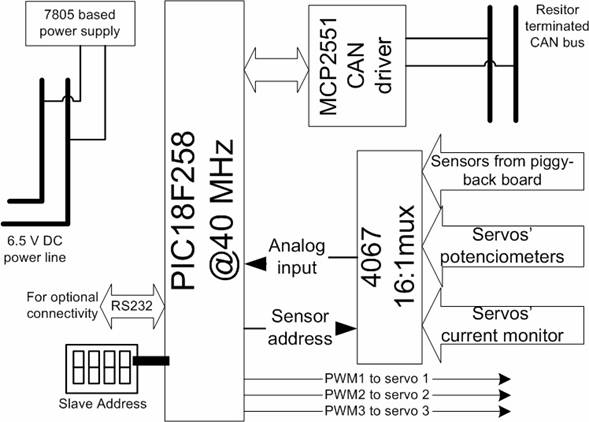


q
Actuação
nas juntas: servomotores HITEC
C
Pequenos,
compactos e relativamente baratos
C
Incluem
motor, redutor e electrónica de controlo
C
Oferecem
controlo directo de posição
q
Limitações/desvantagens
C
Não
disponibilizam controlo de velocidade e/ou binário
C
Comportamento
não linear em função da carga
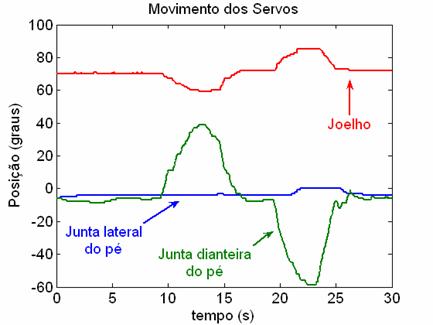
q Actuação e Leitura Sensorial
Ø Controlo de posição: PWM a 50 Hz e duty-cycle
de 1-2 ms
Ø Leitura da posição e estimativa da corrente
consumida

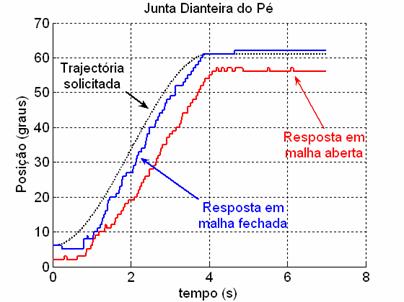
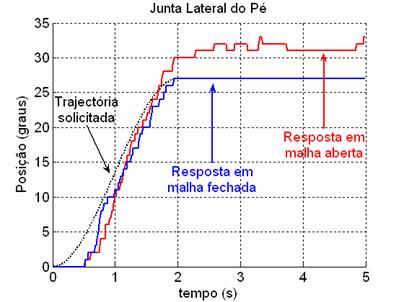
q
Solução: compensação por software usando
malha externa de controlo!
q
Os resultados mostram:
Ø
Bom comportamento em regime estacionário
Ø
Melhoria no seguimento de trajectória
![]()





![]()








q A arquitectura distribuída revela várias
vantagens:
Ø Sistema de controlo mais simples e fiável
Ø Debugging simplificado
q O controlador de baixo-nível mostra
desempenho adequado:
Ø Controlo de posição optimizado com a adição
de um compensador PID
Ø Controlo de velocidade possível com
aplicação de trajectórias suaves
Ø
O
robô é capaz de realizar movimento básicos e “caminha” para a marcha
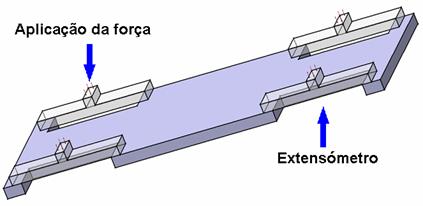
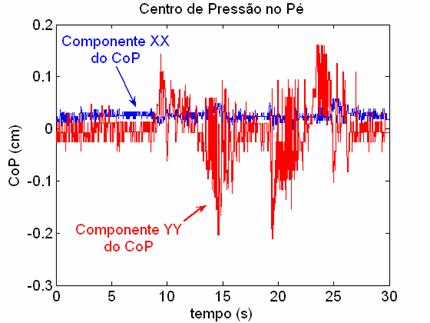
q O controlo local baseado nos sensores de
força é possível:
Ø Resposta bastante reactiva a inclinações do
plano! Mais evoluções à vista …
q Perspectivas futuras:
Ø Compensar variações de inércia usando
estimativa de corrente consumida
Ø Combinar controlo de posição/velocidade com
o controlo de equilíbrio
Ø Substituir PC por sistema baseado em PC104,
nano-ITX ou similar
Ø Participar na próxima edição do ROBOCUP
(Liga Humanóide)

Apresentações
|
Poster |
|
|
Apresentação para o Robótica 2006 |
Vídeos
|
Locomoção sem carga |
|
|
Locomoção com carga de 2.1Kg sobre a anca |
|
|
Controlo de equilíbrio à variação do plano |
|
|
Controlo de equilíbrio pressionando os sensores |
|
|
Controlo de equilíbrio na presença de perturbações |
Artigos publicados
|
Milton Ruas, Filipe M. T. Silva, Vítor M. F. Santos,“Parameter Measurement for Speed and Torque Control of RC Servomotors on a Small-Size Humanoid Robot”, nas actas do Encontro Científico Robótica2006, Guimarães, 2006. |
|
|
Milton Ruas, Filipe M. T. Silva, Vítor M. F. Santos, “A Low-Level Control Architecture for a Humanoid Robot”, submetido à International Conference on Humanoid Robots 2006. |
|
|
Vítor M. F. Santos, Filipe M. T. Silva, “Desenvolvimento de uma Plataforma Humanóide Autónoma de Custo Limitado: Componentes e Soluções Tecnológicas”, proceedings of the IEEE International Conference on Humanoid Robots 2005. |
|
|
Vítor M. F. Santos, Filipe M. T. Silva, “Development of a Low-Cost Humanoid Robot: Components and Technological Solutions”, proceedings of the CLAWAR 2005. |
Relatórios
|
Relatório 2006 |