alimentação
braços - a mesma maxVel com Tx_0,5
braços - a mesma maxVel com Tx_1,5
braços - a mesma maxVel com Tx_1
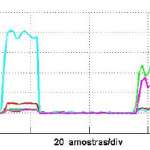
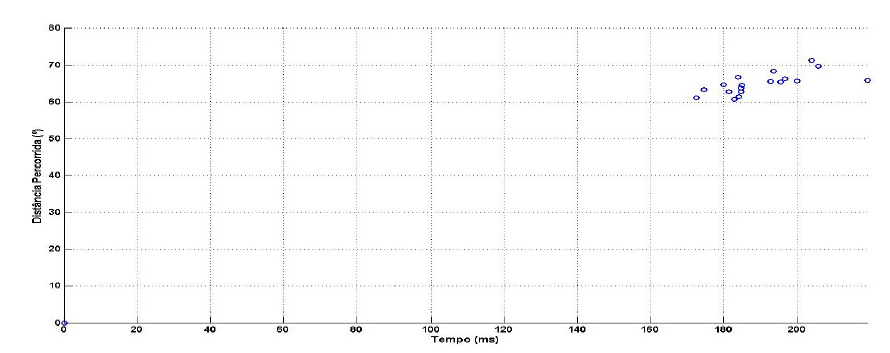
comparação 200 lidos vs ler enviar
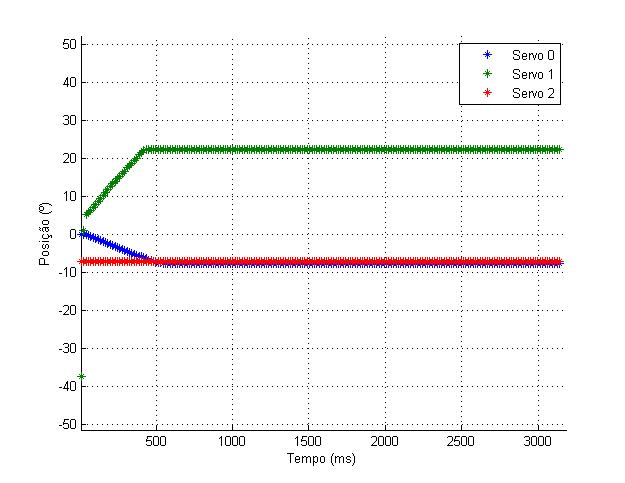
controlo em velocidade com incremento de 0
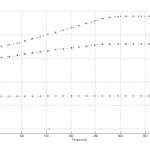
erro de leitura - graf1_speed_20 - graf2_speed_100

erro de leituras - com velocidades iguais 15% o segundo graf temmaior espaçamento entre leituras

inveter sentido do deslocamento
maxVel
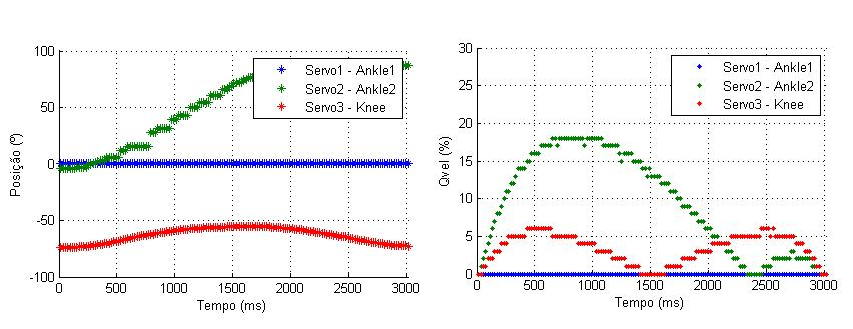
perna - 200valores_speed50
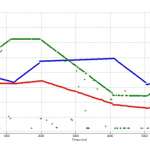
perna - 5movs_speed100
_t.jpg)
perna - 5movs_speed20 (com tempo entre os reads)
perna - 5movs_speed20
perna - ler_enviar_speed50
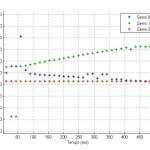
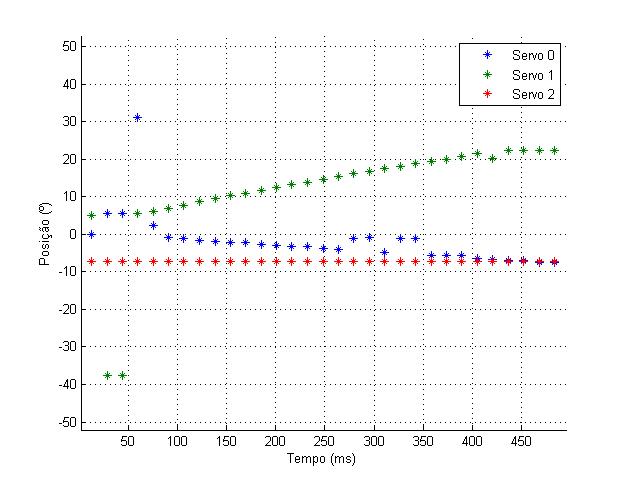
read_pos_speed_incr
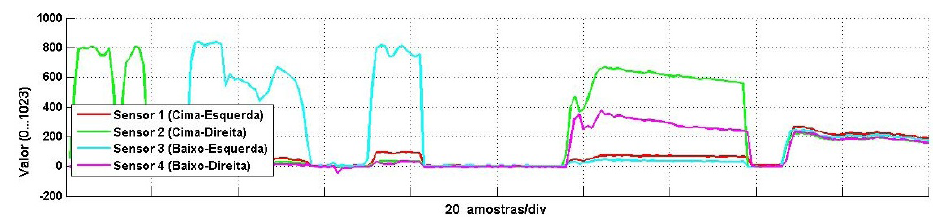
sensor teste 3
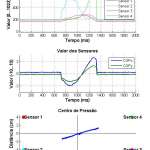
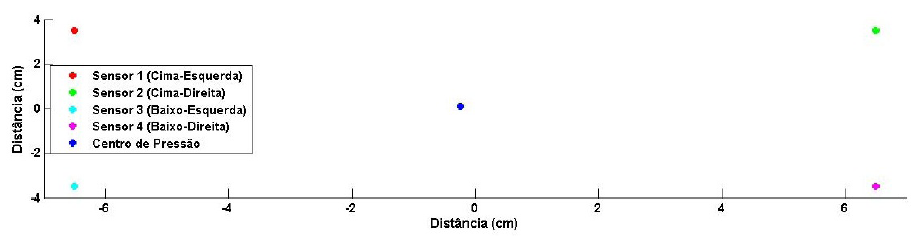
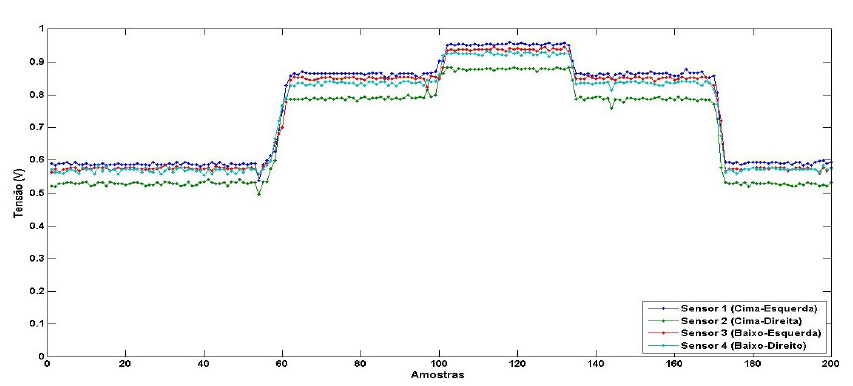
sensores1
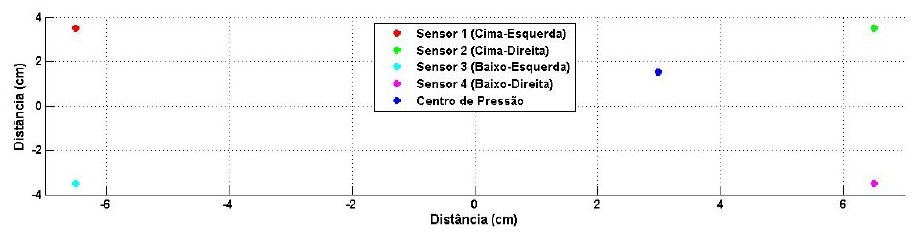
sensores2
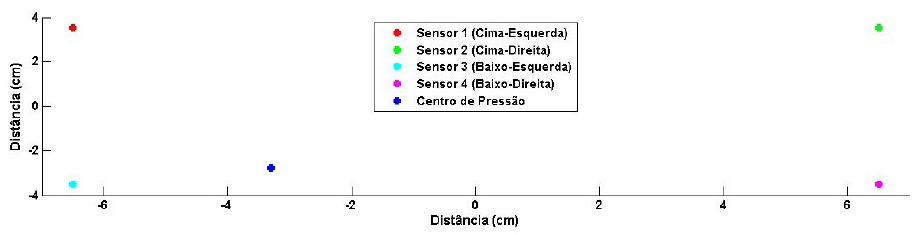
sensores3
sensores4
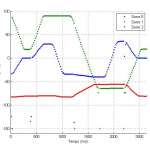
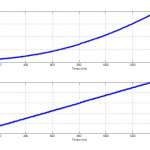
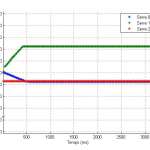
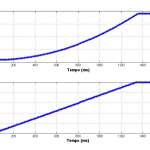
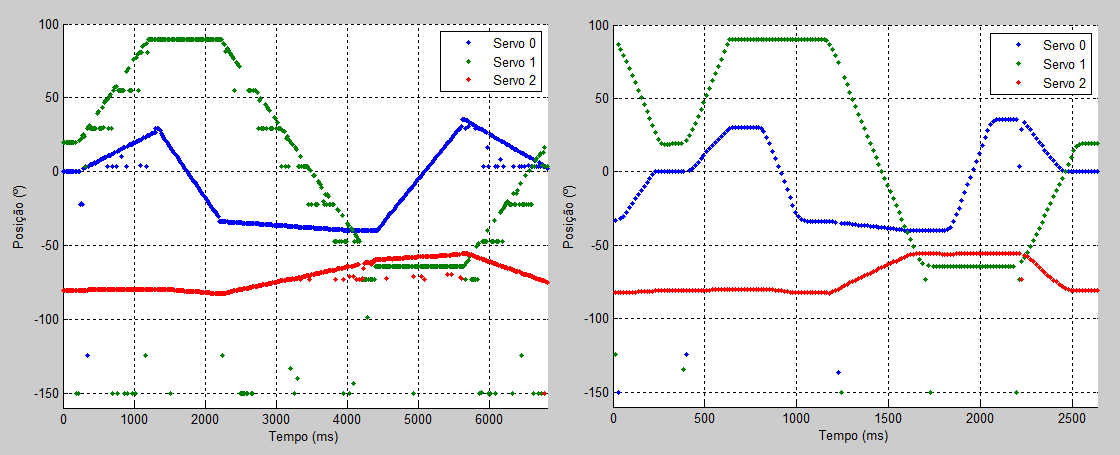
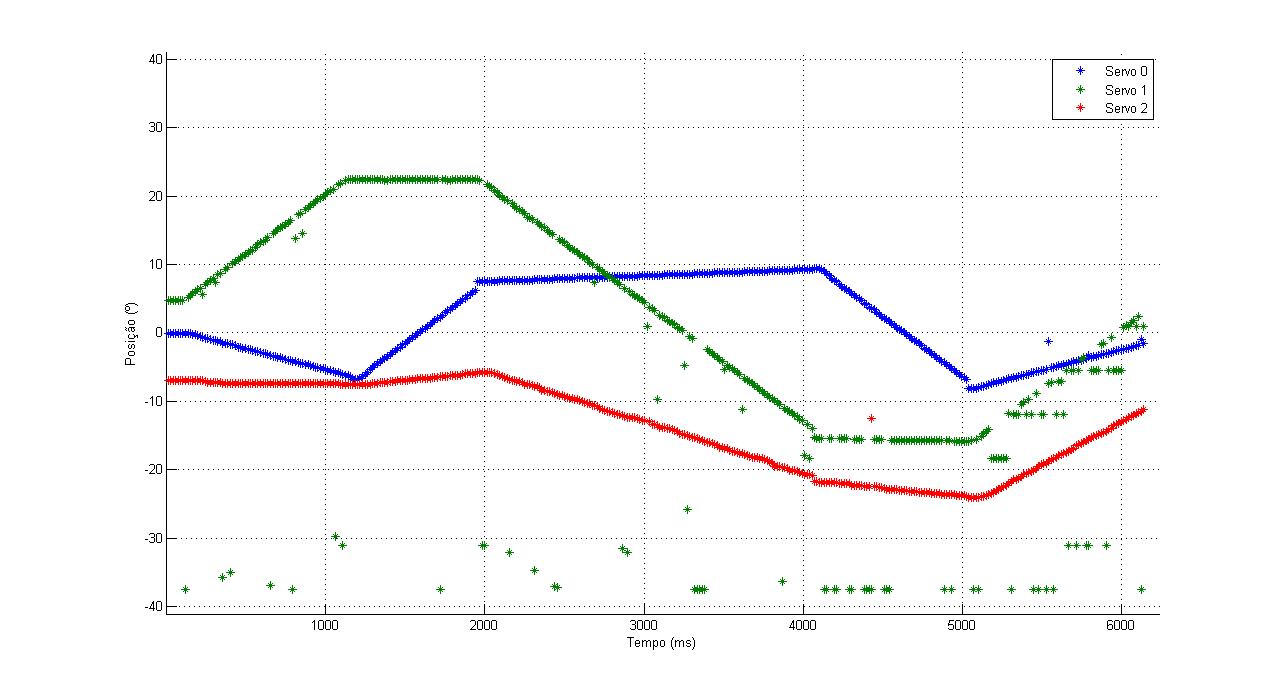
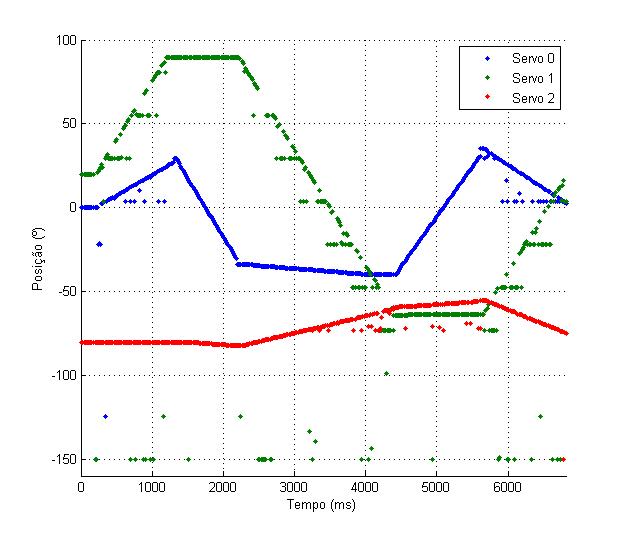
sequencia de movimentos PtP com speed100
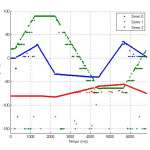
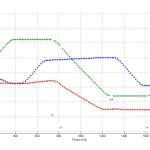
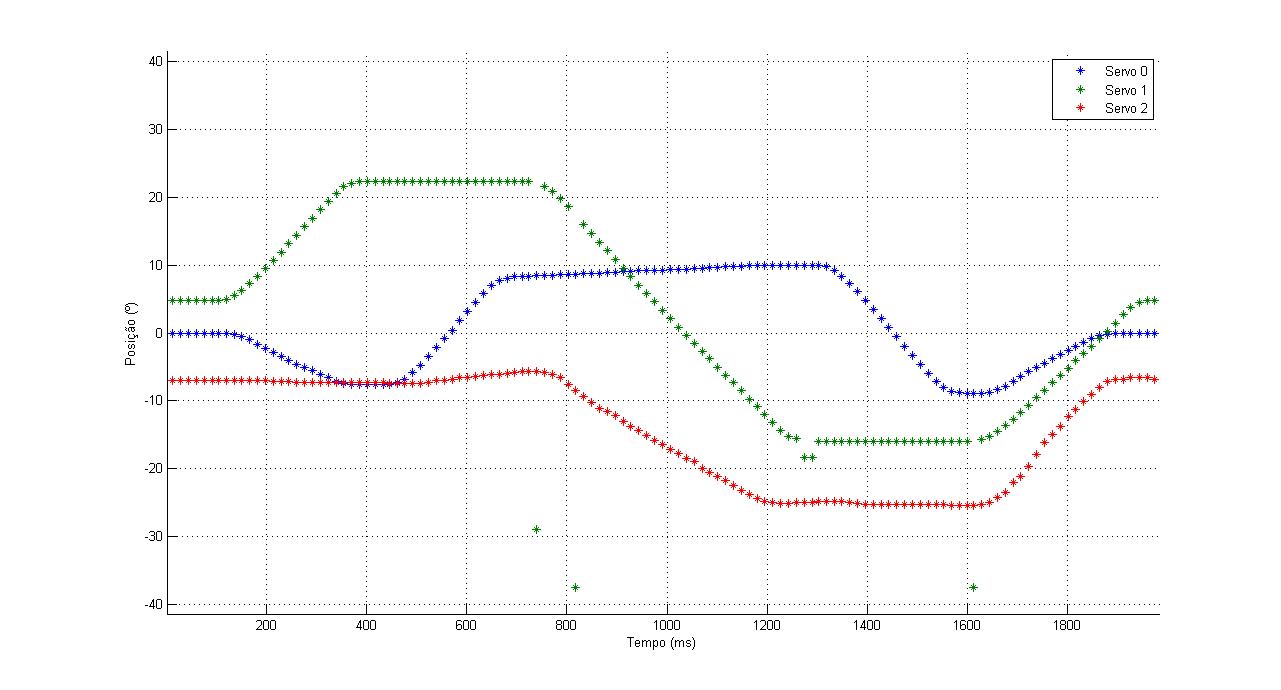
sequencia de movimentos PtP com speed20
valores dinamicos
valores estaticos
 alimentação
alimentação
 braços - a mesma maxVel com Tx_0,5
braços - a mesma maxVel com Tx_0,5
 braços - a mesma maxVel com Tx_1,5
braços - a mesma maxVel com Tx_1,5
 braços - a mesma maxVel com Tx_1
braços - a mesma maxVel com Tx_1
 comparação 200 lidos vs ler enviar
comparação 200 lidos vs ler enviar
 controlo em velocidade com incremento de 0
controlo em velocidade com incremento de 0
 erro de leitura - graf1_speed_20 - graf2_speed_100
erro de leitura - graf1_speed_20 - graf2_speed_100
 inveter sentido do deslocamento
inveter sentido do deslocamento
 maxVel
maxVel
 perna - 200valores_speed50
perna - 200valores_speed50
 perna - 5movs_speed100
perna - 5movs_speed100
.jpg) perna - 5movs_speed20 (com tempo entre os reads)
perna - 5movs_speed20 (com tempo entre os reads)
 perna - 5movs_speed20
perna - 5movs_speed20
 perna - ler_enviar_speed50
perna - ler_enviar_speed50
 read_pos_speed_incr
read_pos_speed_incr
 sensor teste 3
sensor teste 3
 sensores1
sensores1
 sensores2
sensores2
 sensores3
sensores3
 sensores4
sensores4
 sequencia de movimentos PtP com speed100
sequencia de movimentos PtP com speed100
 sequencia de movimentos PtP com speed20
sequencia de movimentos PtP com speed20
 valores dinamicos
valores dinamicos
 valores estaticos
valores estaticos