
RAZOR_imagem1
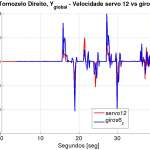
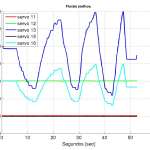
ZZ_servo12
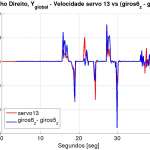
ZZ_servo13
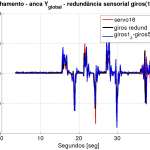
ZZ_servo16_gyro_redund
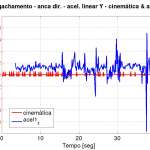
accel_ZZ_y_1
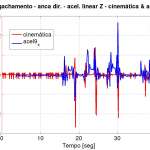
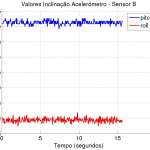
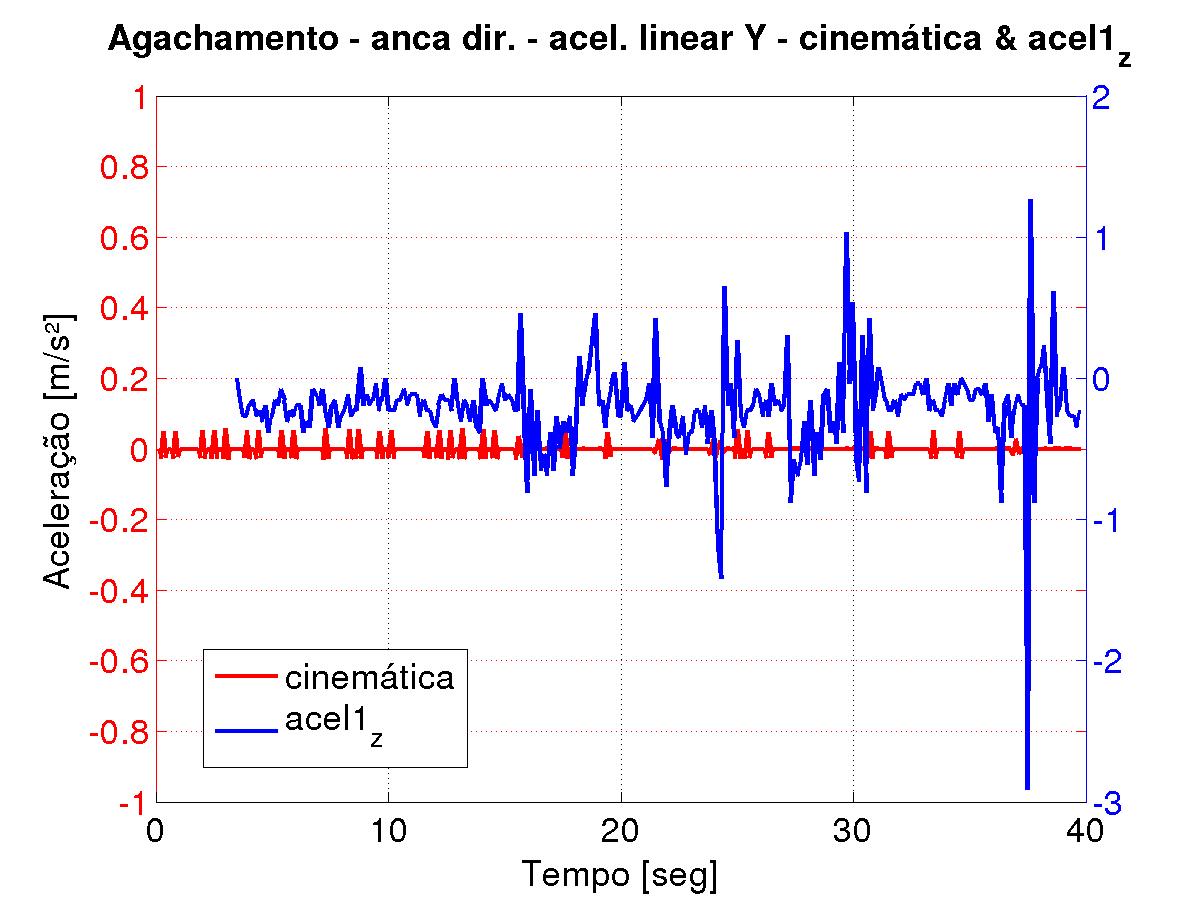
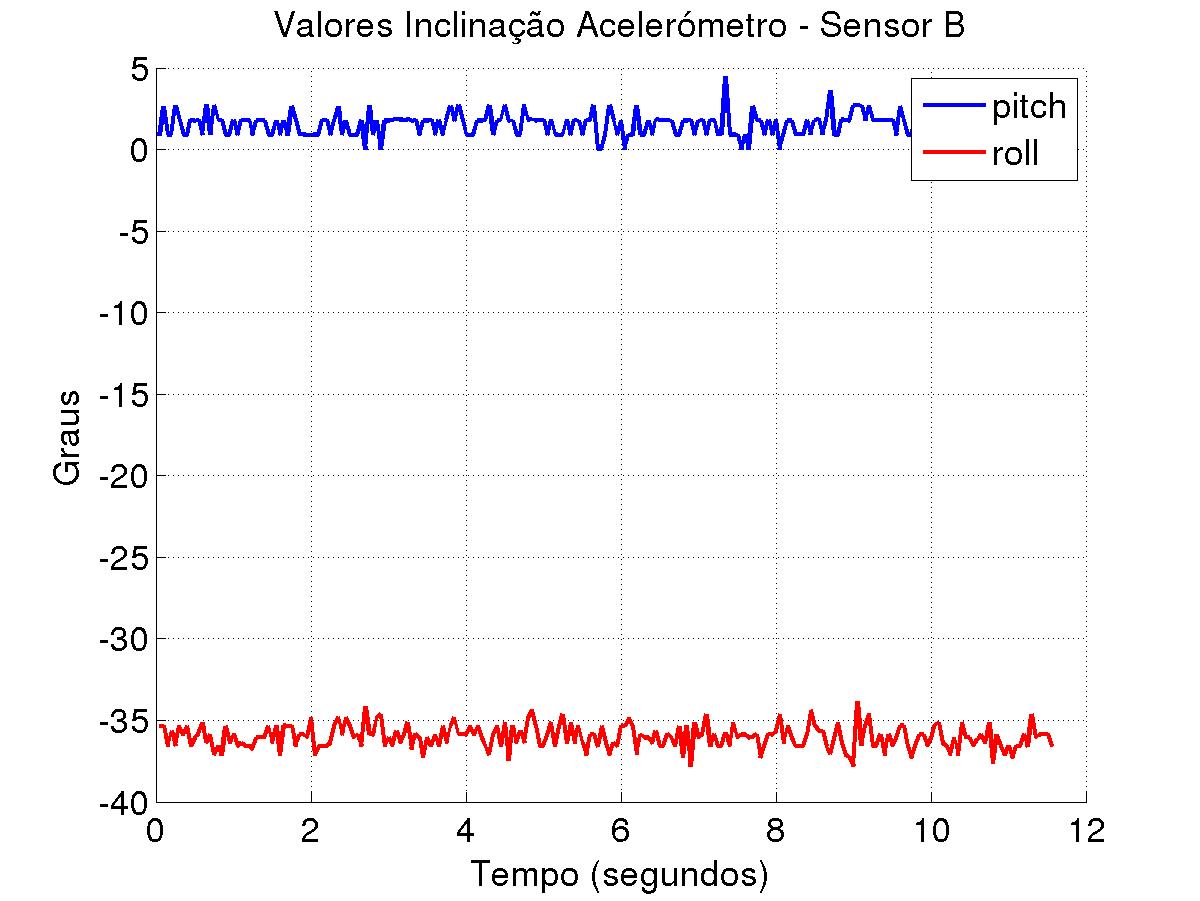
accel_ZZ_z_9

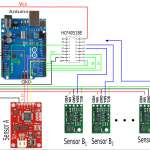
aquisicao_rede
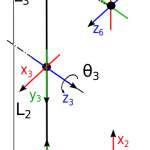
diagrama_cinematica_perna_1
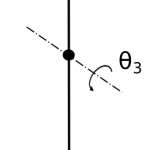
diagrama_cinematica_perna_simplificado
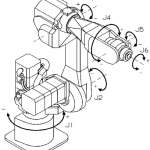
fanuc_joints
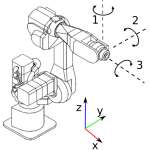
fanuc_rot
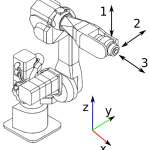
fanuc_trans
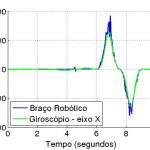
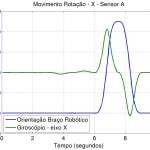
gyro_vs_fanuc

humanoid_inferior_small_diagram

humanoid_network

humanoid_v2
inclin_30_Y_POLOLU

inclin_35_Y_POLOLU
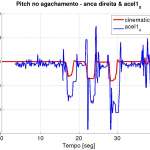
inclin_ZZ_pitch_1
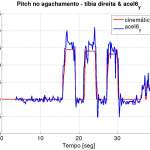
inclin_ZZ_pitch_6

inclin_ZZ_pitch_redund

magn_yaw_trans_A

magn_yaw_trans_B

minIMU_POLOLU_image1
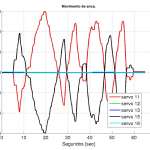
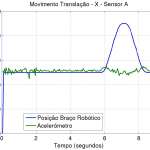
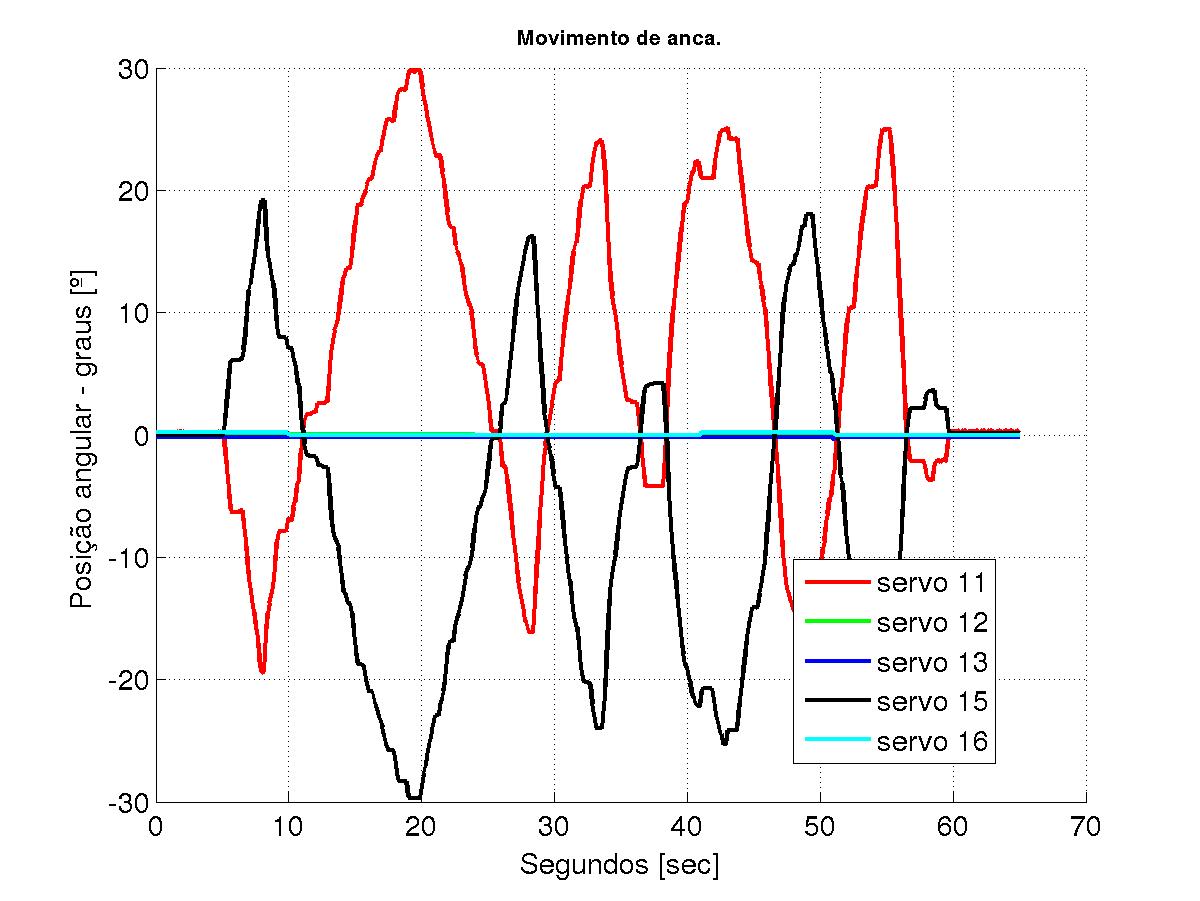
move_XX
move_YY

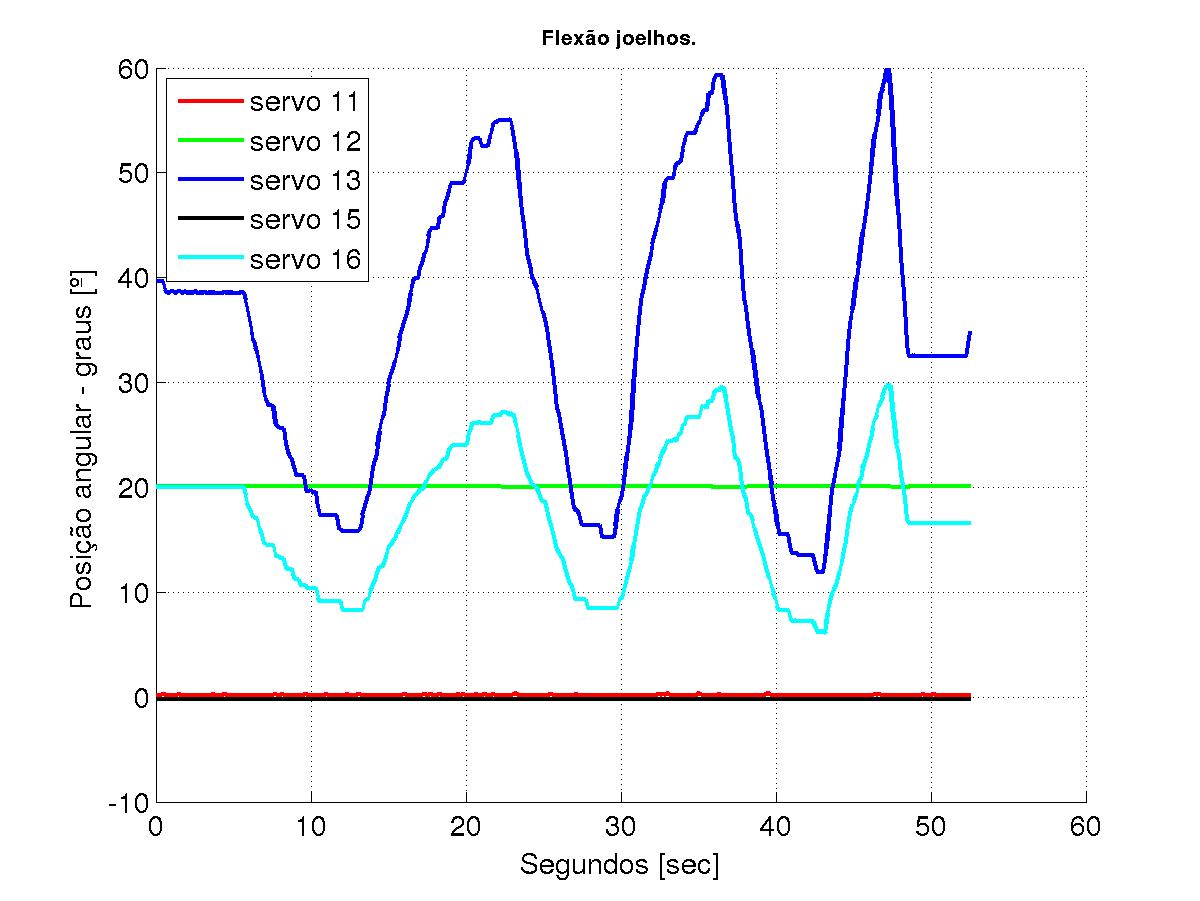
move_ZZ

orientacao_imu

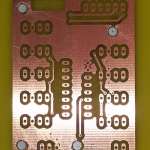
placa_PCB_com_solda
placa_PCB_sem_solda
rede_pequena_esquema_RAZOR
rot_0_0_0_gyro_X_RAZOR

rpy
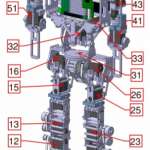
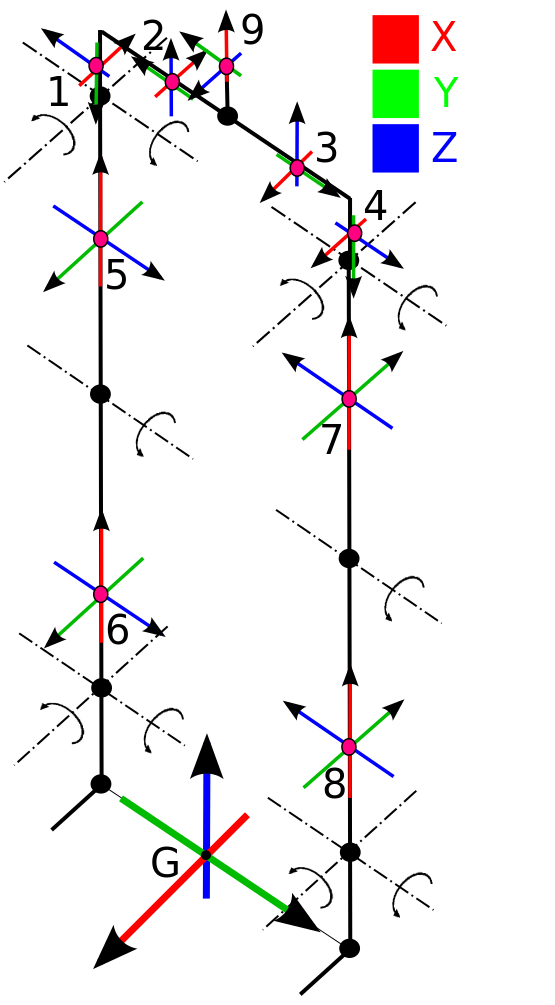
servos_numbered

trans_0_0_0_acel_X_POLOLU
trans_0_0_0_acel_X_RAZOR
 RAZOR_imagem1
RAZOR_imagem1
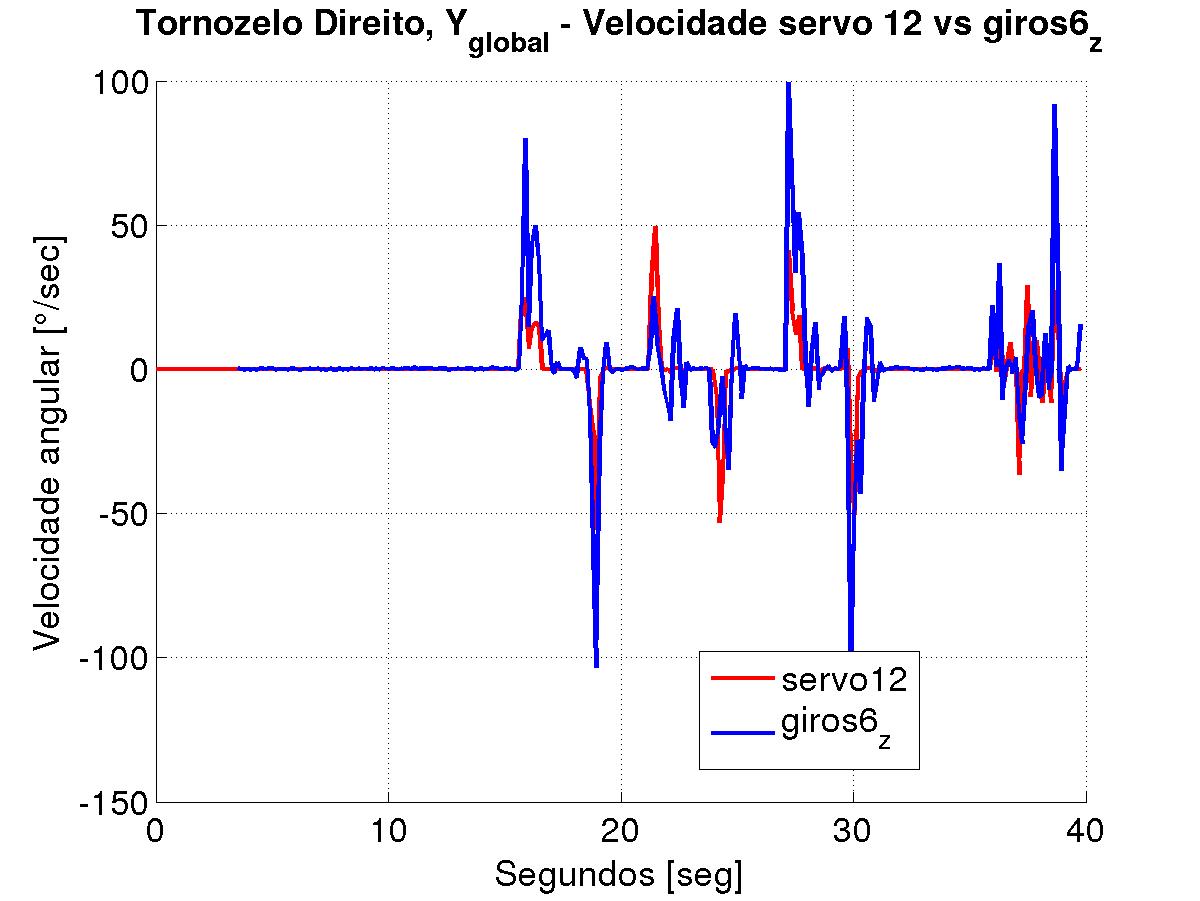 ZZ_servo12
ZZ_servo12
 ZZ_servo13
ZZ_servo13
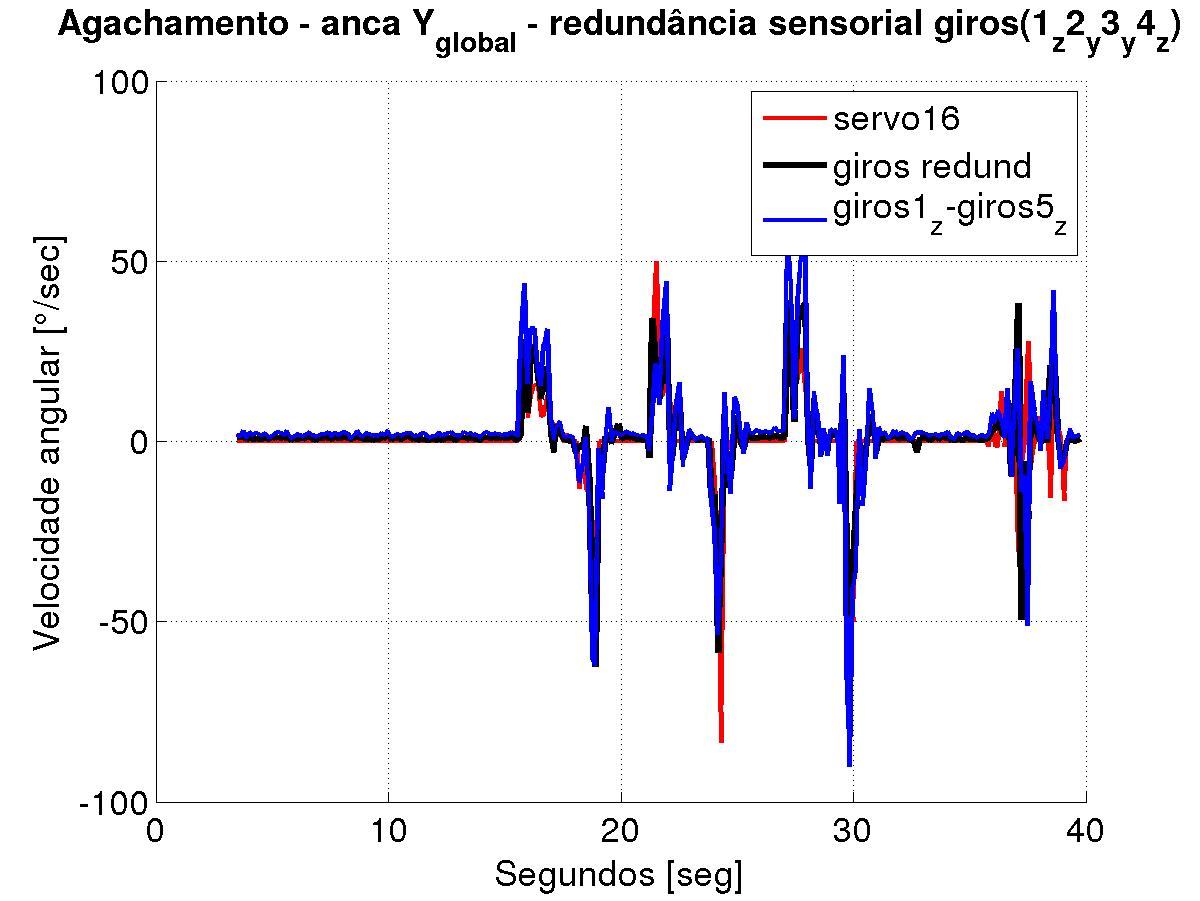 ZZ_servo16_gyro_redund
ZZ_servo16_gyro_redund
 accel_ZZ_y_1
accel_ZZ_y_1
 accel_ZZ_z_9
accel_ZZ_z_9
 aquisicao_rede
aquisicao_rede
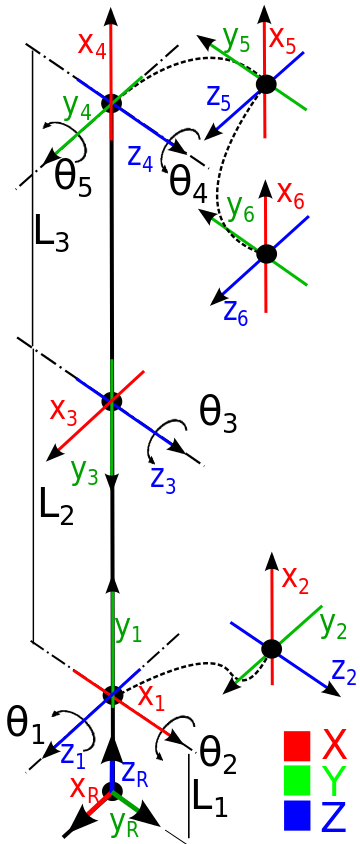 diagrama_cinematica_perna_1
diagrama_cinematica_perna_1
 diagrama_cinematica_perna_simplificado
diagrama_cinematica_perna_simplificado
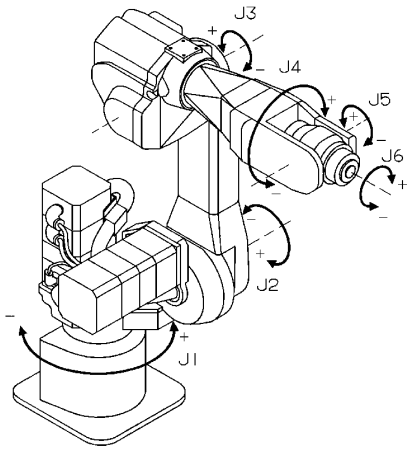 fanuc_joints
fanuc_joints
 fanuc_rot
fanuc_rot
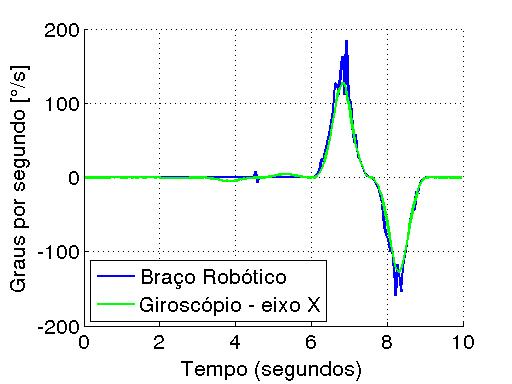 gyro_vs_fanuc
gyro_vs_fanuc
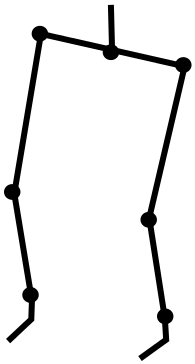 humanoid_inferior_small_diagram
humanoid_inferior_small_diagram
 humanoid_network
humanoid_network
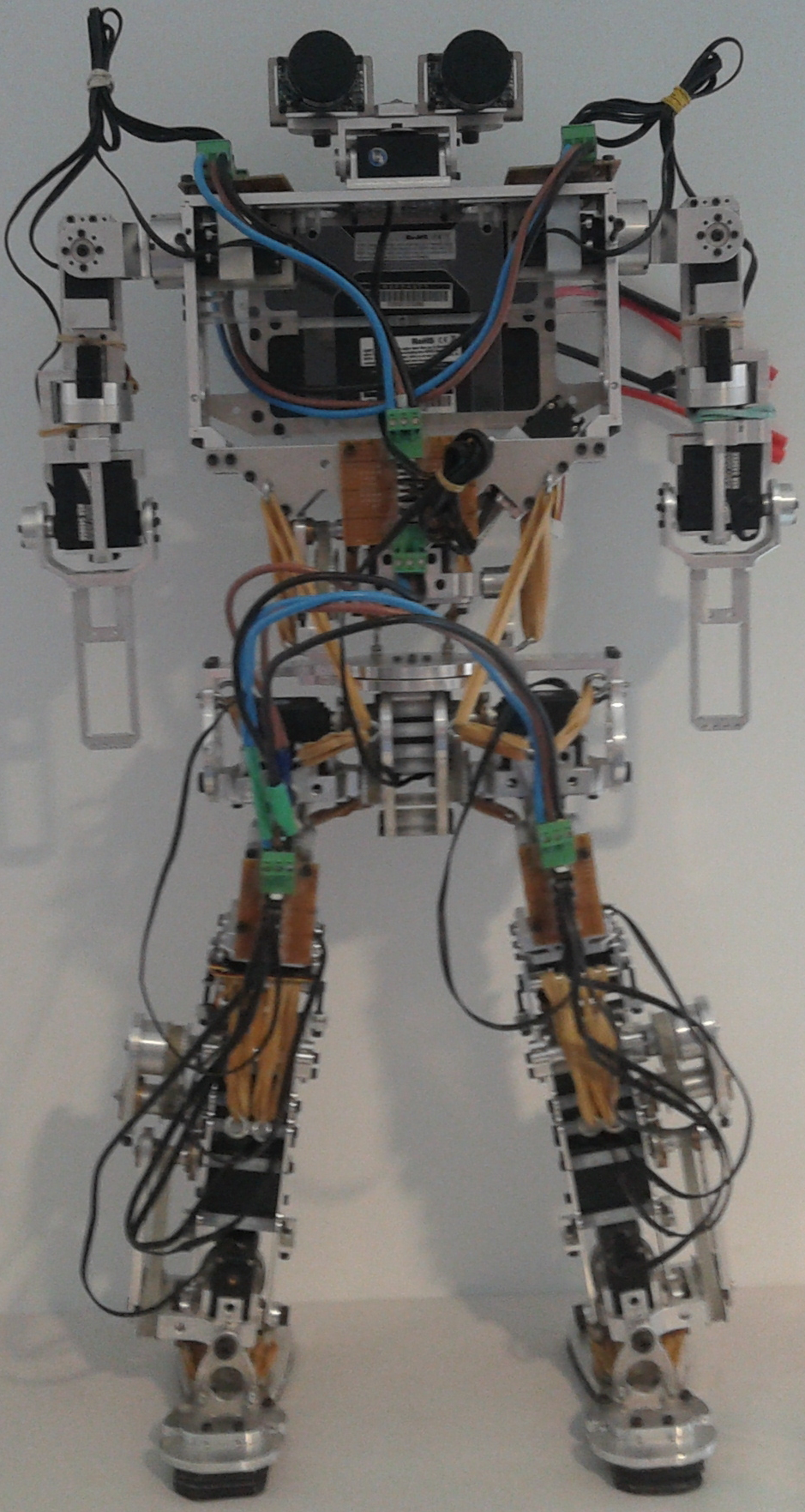 humanoid_v2
humanoid_v2
 inclin_30_Y_POLOLU
inclin_30_Y_POLOLU
 inclin_35_Y_POLOLU
inclin_35_Y_POLOLU
 inclin_ZZ_pitch_1
inclin_ZZ_pitch_1
 inclin_ZZ_pitch_6
inclin_ZZ_pitch_6
 inclin_ZZ_pitch_redund
inclin_ZZ_pitch_redund
 minIMU_POLOLU_image1
minIMU_POLOLU_image1
 move_XX
move_XX
 move_YY
move_YY
 move_ZZ
move_ZZ
 orientacao_imu
orientacao_imu
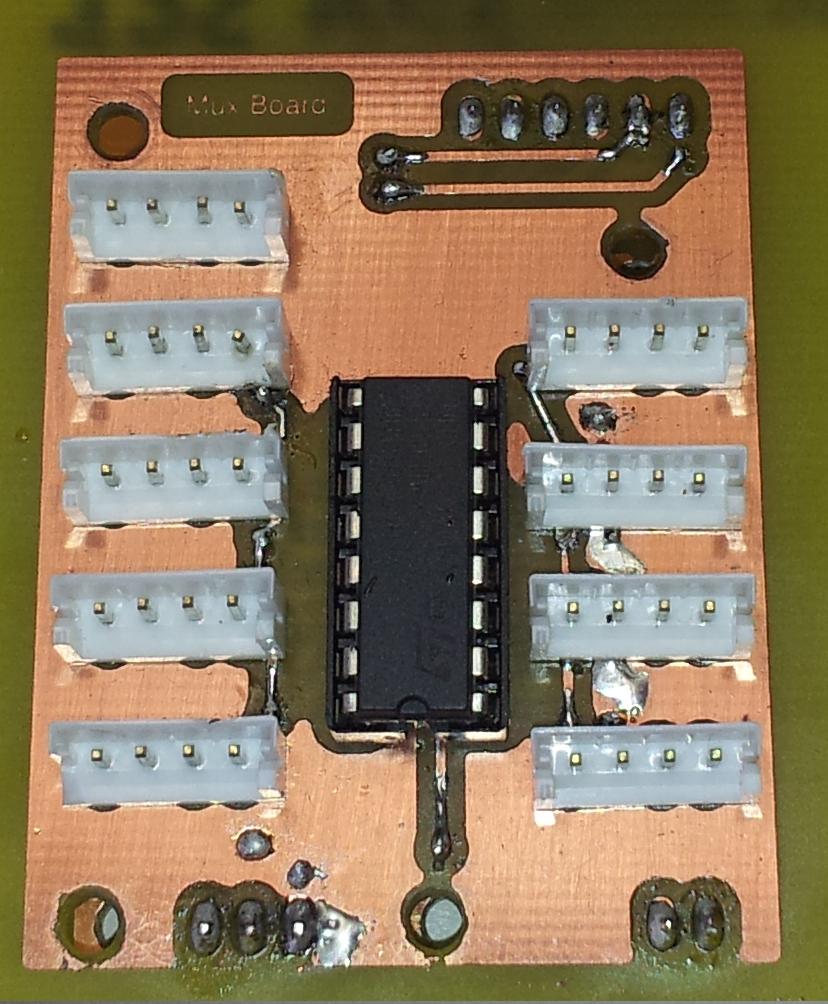 placa_PCB_com_solda
placa_PCB_com_solda
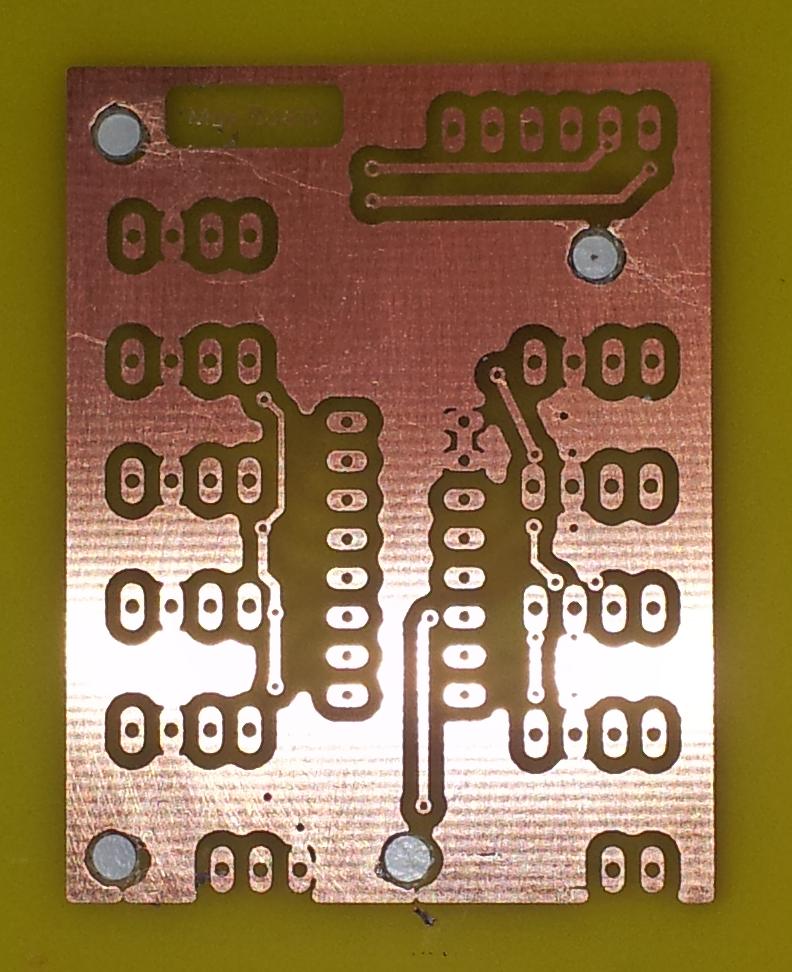 placa_PCB_sem_solda
placa_PCB_sem_solda
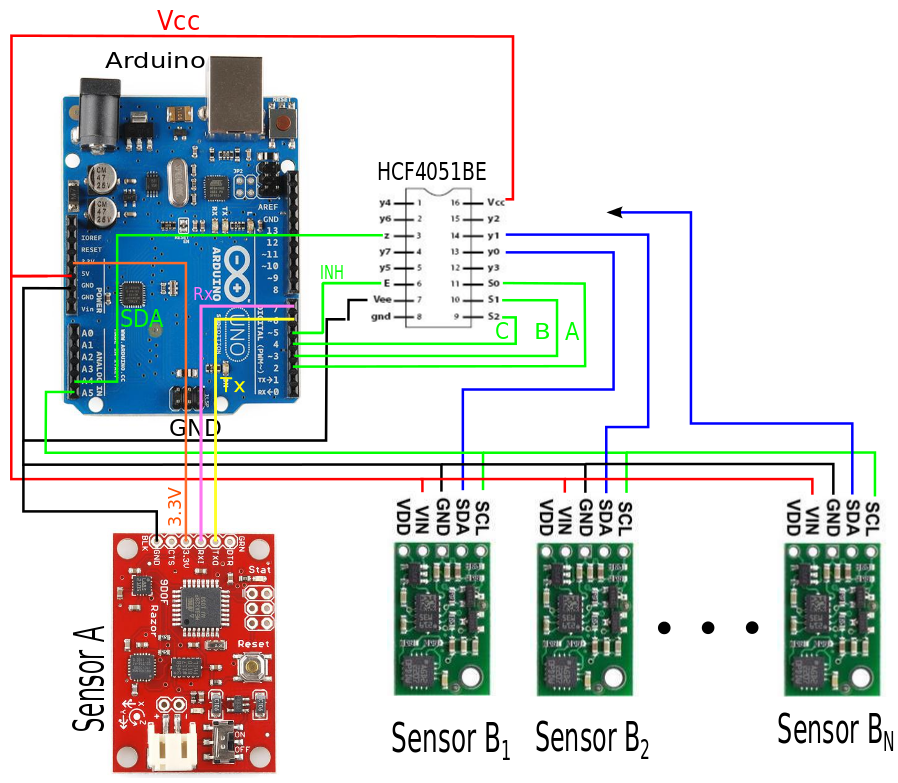 rede_pequena_esquema_RAZOR
rede_pequena_esquema_RAZOR
 rot_0_0_0_gyro_X_RAZOR
rot_0_0_0_gyro_X_RAZOR
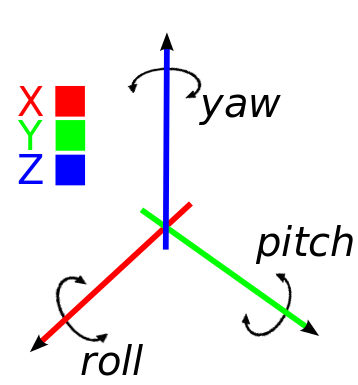 rpy
rpy
 servos_numbered
servos_numbered