General description of the walking machine project
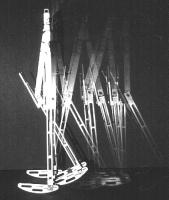
Name of the walking machine/project: Dynamite series Begin and end of the Project: 88-90 Project costs: Building effort [person years]: 1 Source of financial support:Canadian National Sciences and Engineering Research Council Research group Engineering Science, Simon Fraser University Staff of the project: Tad McGeer Keith Antonelli Information via www: http://tam.cornell.edu/faculty/ruina/ruina.html Contact address: Tad McGeer, The Insitu Group 401 Bingen Point Way, Bingen, WA, USA 98605 Tel: ++1 509 493 8600, Fax: ++1 509 493 8601, Email: insitu@insitugroup.com Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.8m Max. speed 60cm/s Number of legs 2 Energy supply Hight Weight 6.2kg Act. degrees of freedom 0 Power supply Width 0.3m Load Pas. degrees of freedom 4 (2D biped with pinned knee and hip joints) Power consumption gravity only References T. McGeer. Principles of walking and running. Advances in Comparative and Environmental Physiology 11: Mechanics of Animal Locomotion. R. McN. Alexander, ed. Berlin: Springer-Verlag 1992. T. McGeer. Dynamics and control of bipedal locomotion. J. Theoretical Biology 163: 277-314, 1993. T. McGeer. Passive bipedal running. Proc. Royal Society of London, Series B 240(1297), May 1990. T. McGeer. Passive dynamic walking. Int. J. Robotics Research. 9(2) April 1990. T. McGeer. Passive dynamic biped catalogue 1991. Proc. 2nd Int. Symp. experimental robotics.Toulouse, June 1991. back to main page of walking machines catalogue %
Research group
Engineering Science, Simon Fraser University
Staff of the project:
Tad McGeer Keith Antonelli
Information via www: http://tam.cornell.edu/faculty/ruina/ruina.html
Contact address:
Tad McGeer, The Insitu Group 401 Bingen Point Way, Bingen, WA, USA 98605 Tel: ++1 509 493 8600, Fax: ++1 509 493 8601, Email: insitu@insitugroup.com
Technical data of the walking machine
References
T. McGeer. Principles of walking and running. Advances in Comparative and Environmental Physiology 11: Mechanics of Animal Locomotion. R. McN. Alexander, ed. Berlin: Springer-Verlag 1992. T. McGeer. Dynamics and control of bipedal locomotion. J. Theoretical Biology 163: 277-314, 1993. T. McGeer. Passive bipedal running. Proc. Royal Society of London, Series B 240(1297), May 1990. T. McGeer. Passive dynamic walking. Int. J. Robotics Research. 9(2) April 1990. T. McGeer. Passive dynamic biped catalogue 1991. Proc. 2nd Int. Symp. experimental robotics.Toulouse, June 1991.
back to main page of walking machines catalogue
%