General description of the walking machine project
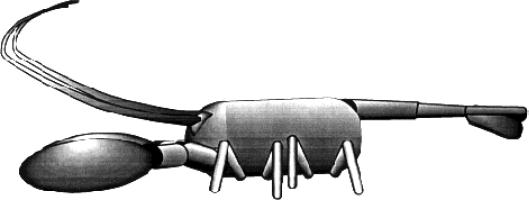
Name of the walking machine/project: Lobster Robot Begin and end of the Project: March 1, 1998-Feb 28, 2001 Project costs: Building effort [person years]: Source of financial support:DARPA/DSO Research group Biomimetic Underwater Robot Program Staff of the project: Joseph Ayers, PI, Don Massa, William Vorus Paul Zavracky, Nick McGruer, Ranjan Mukherjee, Scott Currie Information via www: http://www.dac.neu.edu/msc/burp.html Contact address: Joseph Ayers, Northeastern University Marine Science Center, East Point, Nahant, MA 01908, USA Tel:++ 1 781 581-7370, Email: lobster@neu.edu Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.6m Max. speed Number of legs 8 Energy supply Battery Hight 0.45m Weight Act. degrees of freedom 24 Power supply 12V DC Width 0.15m Load Pas. degrees of freedom 0 Power consumption 90Watt References http://www.dac.neu.edu/msc/biomimeticrobots98.html back to main page of walking machines catalogue %
Research group
Biomimetic Underwater Robot Program
Staff of the project:
Joseph Ayers, PI, Don Massa, William Vorus Paul Zavracky, Nick McGruer, Ranjan Mukherjee, Scott Currie
Information via www: http://www.dac.neu.edu/msc/burp.html
Contact address:
Joseph Ayers, Northeastern University Marine Science Center, East Point, Nahant, MA 01908, USA Tel:++ 1 781 581-7370, Email: lobster@neu.edu
Technical data of the walking machine
References
http://www.dac.neu.edu/msc/biomimeticrobots98.html
back to main page of walking machines catalogue
%