General description of the walking machine project
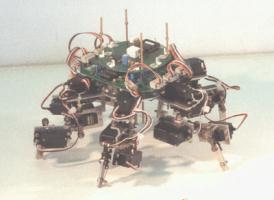
Name of the walking machine/project: MAX (Mobile Autonomous heXapod) Begin and end of the Project: October 1993 - October 1996 Project costs: Building effort [person years]: 3 Source of financial support:UK Engineering and Physical Science Research Council Research group Mobile Robot Research Group, University of Salford Staff of the project: Dr. David P. Barnes Dr. Javan B. Wardle Information via www: http://www.salford.ac.uk/eee/staff/dpb/homepage.html Contact address: Dr. David P. Barnes, Dept. Electronic & Electrical Engineering, University of Salford, The Crescent, Salford, Lancashire, UK, M5 4WT. Tel: ++44 0161 745 5000, Fax: ++44 0161 745 5999, Email: d.p.barnes@eee.salford.ac.uk Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.3m Max. speed 0.1m/s Number of legs 6 Energy supply DC-servos Hight 0.16m Weight 0.762kg Act. degrees of freedom 18 Power supply 5V DC Width 0.3m Load 0.2kg Pas. degrees of freedom 0 Power consumption 15Watt References Please visit: http://www.salford.ac.uk/eee/staff/dpb/homepage.html or http://www.robotics.co.uk/ back to main page of walking machines catalogue %
Research group
Mobile Robot Research Group, University of Salford
Staff of the project:
Dr. David P. Barnes Dr. Javan B. Wardle
Information via www: http://www.salford.ac.uk/eee/staff/dpb/homepage.html
Contact address:
Dr. David P. Barnes, Dept. Electronic & Electrical Engineering, University of Salford, The Crescent, Salford, Lancashire, UK, M5 4WT. Tel: ++44 0161 745 5000, Fax: ++44 0161 745 5999, Email: d.p.barnes@eee.salford.ac.uk
Technical data of the walking machine
References
Please visit: http://www.salford.ac.uk/eee/staff/dpb/homepage.html or http://www.robotics.co.uk/
back to main page of walking machines catalogue
%