








|
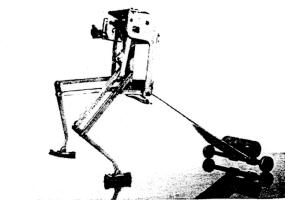
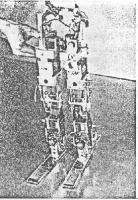
| 1964,Mechanism of Chebyshev - kinematics mock -up of a pair of legs, Dr.sc.,prof. A.L.Kemurdjian and co ll., St. Petersburg, Russia |
|
| 1969, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. The anthropomorphic pneumatically-activated pedipulator WAP-1 was developed. In it, artificial muscles made of rubber were attached as actuatiors. Planar biped locomotion was realized by teaching playback control of its artificial muscles. |
|
| 1970, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. In the second model, WAP-2, the powerful pouch-type artificial muscles were used as actuators. Automatic posture control was obtained by implanting pressure sensors under the soles. |
|
| 1971, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. The WAP-3, a refined model of the WAP-2, was able to move its center of gravity on the frontal plane so that it was able to not only walk on a flat surface but also descend and ascend a staircase or slope and trun while walking. The WAP-3 was directed by a controller based on memory and its actuator was driven by PWM. The three/demensional automatic biped walking realized by the WAP-3 was the first in the world. |
|
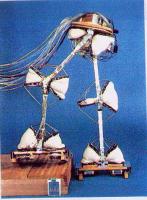
| 1971, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. The mini-computer controlled model WL-5 was developed. It had a laterally bedable body thorugh which it could move it s center of gravity on a frontal plane. Automatic biped walking and the ability to change the direction when it was walking in were made possible through the use of a mini computer. The WL-5 was used as the lower limbs of the WABOT-1 (45sec/step). |
|
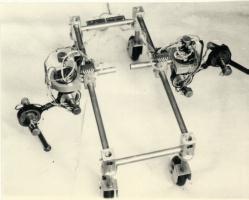
| 1972 Rikscha,Dr.sc.,prof.E.A.Devjanin, Dr. A.V Lensky, Dr. L.G. Stilman and coll., Institute of Mechanics Moscow Lomonossov State University |
|
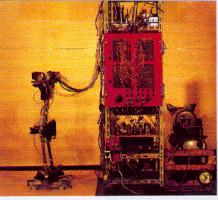
| In 1973 the construction of a human-like robot was started at the Wesada University, Tokyo. The project was led by Ichiro Kato. He and his group developed WABOT I, the first full-scale anthropomorphic robot in the world. It consisted of a limb-control system, a vision system and a conversation system. WABOT-1 was able to communicate with a person in Japanese and to measure distances and directions to the objects using external receptors, artificial ears and eyes, and an artificial mouth. The WABOT-1 walked with his lower limbs and was able to grip and transport objects with hands that used tactile-sensors. It was estimated that the WABOT-1 has the mental faculty of a one-and-half-year-old child. WABOT-1 consisted of the WAM-4 (as its arbificial hands) and the WL-5 (it artificial legs). |
|
| 1980, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. WL-9DR: Quasi-dynamic walking was realized for the first time in the world by the model WL-9DR which used a 16-bit micro/computer as its controller instead of a mini-computer, enabling versatile control. The number of points the WL-9DR's sole touched the floor was increased from three to four. This, in turn, made the mathematical solution of a particular walking pattern much more easily attainable (10sec/step). |
|
| 1982-83, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. The model WL-10R, a refined type of WL-10 was constructed, in which the rotary type servo-actuator (RSA) was introduced and carbon-fiber reinforced plastic (CFRP) was used in its structural parts. The WL-10R added one more degree of freedom at the yaw axis of the hip joint. Consequently the WL-10R acquired the function of walking laterally, turning and walking forward and also backward, which are called plane walking (4.4 sec/step). |
|
| The two legged machine Biper was developed at the University of Tokyo by H. Kimura, M. Mitsuishi, I. Shimoyama and Hirofumi Miura. The machine has 8 degrees of freedom and its energy need is supplied by DC-servos ([Miura and Shimoyama, 1984]). |
|
| The machine Biped was developed in 1985 by Jessica Hodgins and Marc Raibert. It is from 0,44 to 0,67 m long and reaches a maximum speed of 1,5 to 4,1 m/s. With its two legs it has got 4 degrees of freedom. The power supply is guaranteed by hydraulic driven actuators. ([Raibert, 1986b, Hodgins, 1988, Hodgins and Raibert, 1990]) |
|
| 1985, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. WL-10RD> With this machine Kato and his group focused on developing a new biped walking robot which is able to ascend and descend stairs and slight inclines. By modifiying a preset walking pattern, they managed to get a robot that could climb stairs and inclines in 2 to 5 seconds a step. |
|
| 1985, Ichiro Kato, Department of Mechanical engineering School of Science and Engineering, and Humanoid Research Laboratory, Advanced Research Center for Science and engineering, Waseda University, Tokyo, Japan. The WHL-11 (Waseda Hitach Leg-11) biped walking robot was developed by Hitachi Ltd. based on the WL-10R and installing a computer and a hydraulic pump. The WHL-11 is capable of static walking on a flat surface at thirteen seconds a step and turning. |
|
| 1985 Wasubot built by Kato and his research group , Waseda University, Tokyo, Japan. Teh robot musician WASUBOT (WAseda SUmitomo roBOT), veveloped by Sumitomo Electric Industry Ltd., is in general the same as the WABOT-2 except that WAM-8s were used its arms and slight refinements were made to facilitate maintenance. The WASUBOT could play a keyboard instrument after reading a music score, and had a repertoire of 16 tunes. |
|
| BLR-G2, 1984-1988, Gifu University, Japan, J. Furusho, A. Sano, Max. speed 0.35m/s, Number of legs 2, Energy supply DC-servos, Height 0.97m, Act. degrees of freedom 7, ([Furusho and Sano, 1990]) |
|
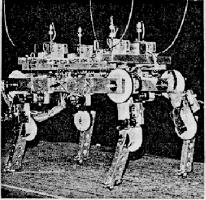
| 1989, Colt3 was developed in the Gifu University, Tokyo, A. Sano, J. Furusho, Length, 0.94m, Max. speed 0.23m/s, Number of legs 4, Energy supply DC-servos, Height 0.88m, Weight 45kg, Act. degrees of freedom 12, Width 0.76m, ([Sano and Furusho, 1989]) |
|
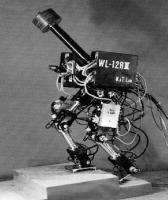
| In 1985 Kato presented with WL10-RD the first robot of this serie. With WL12RIII he developed 1989 a biped walking robot which is able to walk on a terrain stabilized by trunk motion. By introducing a ``Virtual surface''which is defined by terrain's geometry and feet trajectories, they proposed an algorithm to compute trunk`s trajectory effectively. The WL-12RIII realized 2.6 seconds walking up and down stairs with 10cm height and 1.6 seconds walking on a trapezoidal terrain with an inclination of 10 degrees. Kato and his group developed a walking control method which enables stable walking under unknown external forces and moments by using cooperation motion of a trunk and lower- limbs. They proposed a computation algorithm to compute trunk`s trajectory for external forces and moments and a target landing point of a swing foot to converge trunk's trajectory. The WL-12RIII realized 0.64 seconds stepping motion under an unknown external of 100N wiht 0.3 seconds time width by installing a newly developed controller which is able to compute the algorithm in real time. |
|
| 1990, Prof. A. Formalsky, Dr. Lensky und Koll, Institut für Mechanik Universität Moskau |
History of hopping machine at MIT http://www.leglab.ai.mit.edu/leglab/
 back to main page of walking machines catalogue
back to main page of walking machines catalogue