General description of the walking machine project
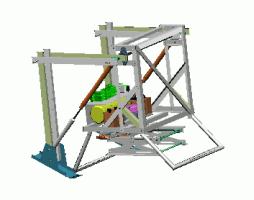
Name of the walking machine/project: Ozomatli Begin and end of the Project: june 1994-april 1996 Project costs:USD 3455 Building effort [person years]: 4 Source of financial support:Internal research project Research group Universidad Panamericana, Mexico City, Mexico Staff of the project: Dr. Roberto F. Jacobus Jesus Zepeda R. Marcela Gutierrez P. Raul Basualdo G. Roberto Diaz L. Information via www: http://www.mixcoac.upmx.mx/info/ozomatli.html Contact address: Dr. Roberto Jacobus, Universidad Panamericana August Rodin 498, Col. Insurgentes Mixcoac, Mexico City, c.p 03920, Mexico D.F, Mexico Tel: ++52 5 598-5388, Fax: ++52 5 563-3747, Email: rjacobus@mixcoac.upmx.mx Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0,7m Max. speed 3m/s Number of legs 3 Energy supply Pneumatic robot Height 0,86m Weight 40 kg Act. degrees of freedom Power supply Width 0,98m Load Pas. degrees of freedom Power consumption References back to main page of walking machines catalogue %
Research group
Universidad Panamericana, Mexico City, Mexico
Staff of the project:
Dr. Roberto F. Jacobus Jesus Zepeda R. Marcela Gutierrez P. Raul Basualdo G. Roberto Diaz L.
Information via www: http://www.mixcoac.upmx.mx/info/ozomatli.html
Contact address:
Dr. Roberto Jacobus, Universidad Panamericana August Rodin 498, Col. Insurgentes Mixcoac, Mexico City, c.p 03920, Mexico D.F, Mexico Tel: ++52 5 598-5388, Fax: ++52 5 563-3747, Email: rjacobus@mixcoac.upmx.mx
Technical data of the walking machine
References
back to main page of walking machines catalogue
%