General description of the walking machine project
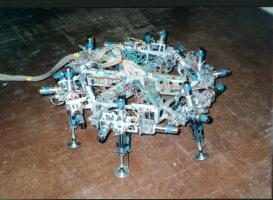
Name of the walking machine/project: Salford-hexapod Begin and end of the Project: 1991-1997 Project costs: Building effort [person years]: 2-3 years Source of financial support:EPSRC and the University of Salford Research group Machines, Kinematics and Robotics Staff of the project: Dr. David Howard Dr. Shan Miao Information via www: http://www.salford.ac.uk/ Contact address: Dr. David Howard, Aeronautical, Mechanical & Manufacturing Engineering Salford, M5 4WT, United Kingdom Tel: ++44-161-2953584, Fax: ++44-161-2955575, Email: D.Howard@amme.Salford.ac.uk Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.835m Max. speed 0.2m/s Number of legs 6 Energy supply DC-servos Hight 0.353m Weight 16.75kg Act. degrees of freedom 18 Power supply Width 0.835m Load Pas. degrees of freedom 18 Power consumption References back to main page of walking machines catalogue %
Research group
Machines, Kinematics and Robotics
Staff of the project:
Dr. David Howard Dr. Shan Miao
Information via www: http://www.salford.ac.uk/
Contact address:
Dr. David Howard, Aeronautical, Mechanical & Manufacturing Engineering Salford, M5 4WT, United Kingdom Tel: ++44-161-2953584, Fax: ++44-161-2955575, Email: D.Howard@amme.Salford.ac.uk
Technical data of the walking machine
References
back to main page of walking machines catalogue
%