General description of the walking machine project
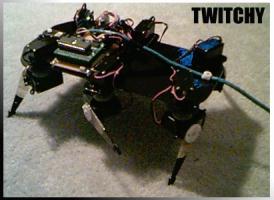
Name of the walking machine/project: Twitchy (Hexapod) Begin and end of the Project: March 1998 to present Project costs: Building effort [person years]: 1 Source of financial support:self financed Research group Silicon R&D Staff of the project: Colin MacKenzie Information via www: http://www.colinmackenzie.net Colin MacKenzie, Silicon R&D 66 Mountain Rd, Halifax, Nova Scotia, Canada Tel. (902) 453-0700 or (902) 479-1175, Email: robots@colinmackenzie.net Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.3m Max. speed 10cm/s Number of legs 6 Energy supply DC-servos Hight 0.13m Weight 12kg Act. degrees of freedom 12 Power supply 12V, 5V Width 0.15m Load 1kg Pas. degrees of freedom 0 Power consumption References back to main page of walking machines catalogue %
Research group
Silicon R&D
Staff of the project:
Colin MacKenzie
Information via www: http://www.colinmackenzie.net
Colin MacKenzie, Silicon R&D 66 Mountain Rd, Halifax, Nova Scotia, Canada Tel. (902) 453-0700 or (902) 479-1175, Email: robots@colinmackenzie.net
Technical data of the walking machine
References
back to main page of walking machines catalogue
%