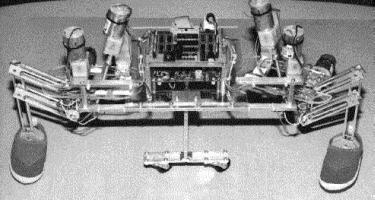
General description of the walking machine project
Name of the walking machine/project: Autonomous Modular Walking Vehicle Begin and end of the Project: Jan-96 to April 97 Project costs: Building effort [person years]: Source of financial support: Research group Staff of the project: Dylan Horvath (dhorvath@novice.uwaterloo.ca) Stef Williams (s2willia@novice.uwaterloo.ca) Jeff Lee (jplee@systems.uwaterloo.ca) Information via www: http://real.uwaterloo.ca/~robot Contact address: Dylan Horvath, Department Systems design Engineering, University Waterloo 200 University Avenue West, Waterloo, Ontario, Canada N2L 3G1 Tel: ++ 1 519 888-4567 , Fax: ++ 1 519 884-8009, Email: dhorvath@novice.uwaterloo.ca Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.61m Max. speed 1cm/s Number of legs 6 Energy supply Nickel MiH rechargeable power packs Height 0.3m Weight 4.5kg Act. degrees of freedom 18 Power supply 12V DC Width 0.46m Load 2.5kg Pas. degrees of freedom 0 Power consumption References back to main page of walking machines catalogue %
Research group
Staff of the project:
Dylan Horvath (dhorvath@novice.uwaterloo.ca) Stef Williams (s2willia@novice.uwaterloo.ca) Jeff Lee (jplee@systems.uwaterloo.ca)
Information via www: http://real.uwaterloo.ca/~robot
Contact address:
Dylan Horvath, Department Systems design Engineering, University Waterloo 200 University Avenue West, Waterloo, Ontario, Canada N2L 3G1 Tel: ++ 1 519 888-4567 , Fax: ++ 1 519 884-8009, Email: dhorvath@novice.uwaterloo.ca
Technical data of the walking machine
References
back to main page of walking machines catalogue
%