General description of the walking machine project
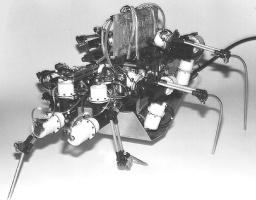
Name of the walking machine/project: Boadicea Begin and end of the Project:September, 1992 - January, 1995 Project costs:USD 15000 Building effort [person years]: 2.5 Source of financial support:NASA Jet Propulsion Laboratory Research group MIT Mobile Robotics Laboratory Staff of the project: 1 graduate student Information via www: http://www.ai.mit.edu/projects/mobile-robots/ Contact address: Center for Design Research Mike Binnard 560 Panama Street Stanford, CA 94305 USA (415) 725-0161 FAX (415) 725-8475, Email: binnard@cdr.stanford.edu Technical data of the walking machine Dimension Capacity Mobility Energy supply Length 0.5m Max. speed 10cm/s Number of legs 6 Energy supply pneumatic power Hight Weight 2.5kg Act. degrees of freedom 16 Power supply Width Load Pas. degrees of freedom 0 Power consumption pneumatic power, 100 psi References see http://www.ai.mit.edu/projects/boadicea (this includes information and photographs) back to main page of walking machines catalogue %
Research group
MIT Mobile Robotics Laboratory
Staff of the project:
1 graduate student
Information via www: http://www.ai.mit.edu/projects/mobile-robots/
Contact address:
Center for Design Research Mike Binnard 560 Panama Street Stanford, CA 94305 USA (415) 725-0161 FAX (415) 725-8475, Email: binnard@cdr.stanford.edu
Technical data of the walking machine
References
see http://www.ai.mit.edu/projects/boadicea (this includes information and photographs)
back to main page of walking machines catalogue
%