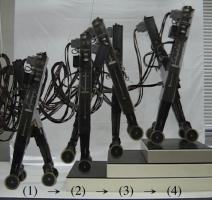
General description of the walking machine project
Name of the walking machine/project: Biped type leg-wheeled robot Begin and end of the Project: 1996 - 2001 Project costs: 6 Mio Yen p.a. (hardware) Building effort [person years]: 2 p.a. Source of financial support:Japanese Government Research group Mechanism Div., Robotics Dep., Mechanical Engineering Lab., AIST, MITI Staff of the project: Dr. Osamu Matsumoto Dr. Shuuji Kajita Dr. Muneharu Saigo Prof. Dr. Kazuo Tani Information via www: http://www.mel.go.jp/KEIJI/press/h10-9-25/H10-9-25.html Contact address: Dr. Osamu Matsumoto, Mechanical Engineering Lab., AIST, MITI 1-2, Namiki, Tsukuba, Ibaraki, 305-8564, Japan Tel:+81-298-58-7281, Fax:+81-298-58-7275, Email: matsumoto@mel.go.jp Technical data of the walking machine Dimension Capacity Mobility Energy supply Length Max. speed 6cm/s legged locomation Number of legs 2 Energy supply DC-servos Hight 0.575 - 0.74cm Weight 10kg Act. degrees of freedom 5 Power supply Not self-contained 12V DC Width 0.23m Load 2kg Pas. degrees of freedom 0 Power consumption 80Watt References [Osamu Matsumoto and KazuoTani, 1998] back to main page of walking machines catalogue %
Research group
Mechanism Div., Robotics Dep., Mechanical Engineering Lab., AIST, MITI
Staff of the project:
Dr. Osamu Matsumoto Dr. Shuuji Kajita Dr. Muneharu Saigo Prof. Dr. Kazuo Tani
Information via www: http://www.mel.go.jp/KEIJI/press/h10-9-25/H10-9-25.html
Contact address:
Dr. Osamu Matsumoto, Mechanical Engineering Lab., AIST, MITI 1-2, Namiki, Tsukuba, Ibaraki, 305-8564, Japan Tel:+81-298-58-7281, Fax:+81-298-58-7275, Email: matsumoto@mel.go.jp
Technical data of the walking machine
References
[Osamu Matsumoto and KazuoTani, 1998]
back to main page of walking machines catalogue
%