Class para fazer o processamento da imagem. More...
#include "main.hh"#include "cmdline.h"#include "LaneDetector.hh"#include <stdio.h>#include <fstream>#include <sstream>#include <iostream>#include <iomanip>#include <ctime>#include <cv.h>#include <highgui.h>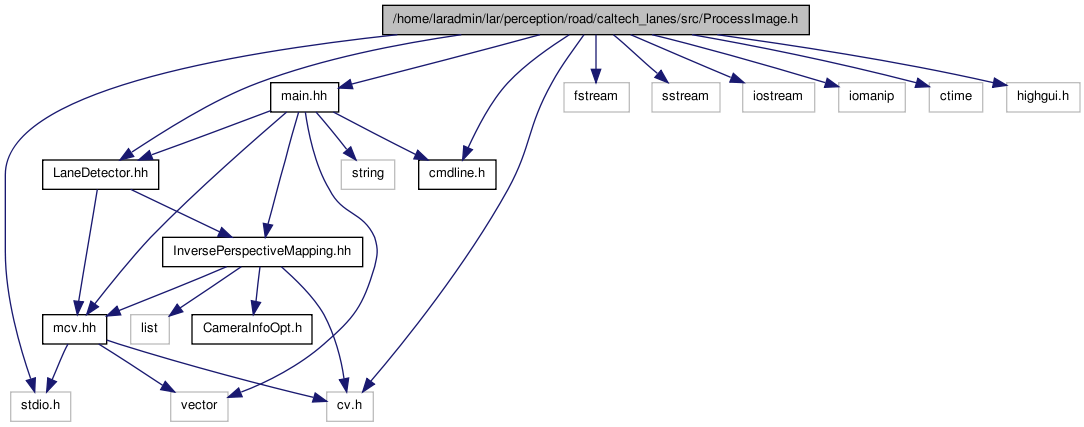
Go to the source code of this file.
Classes | |
| class | Procecess |
Defines | |
| #define | ERROR(fmt,...) (fprintf(stderr, "%s:%d error " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? -1 : -1) |
| #define | MSG(fmt,...) (fprintf(stdout, "%s:%d msg " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? 0 : 0) |
Class para fazer o processamento da imagem.
| filename | the input file name | |
| cameraInfo | the camera calibration info | |
| lanesConf | the lane detection settings | |
| stoplinesConf | the stop line detection settings | |
| options | the command line arguments |
Definition in file ProcessImage.h.
| #define ERROR | ( | fmt, | |||
| ... | ) | (fprintf(stderr, "%s:%d error " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? -1 : -1) |
Definition at line 62 of file ProcessImage.h.
| #define MSG | ( | fmt, | |||
| ... | ) | (fprintf(stdout, "%s:%d msg " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? 0 : 0) |
Definition at line 58 of file ProcessImage.h.

