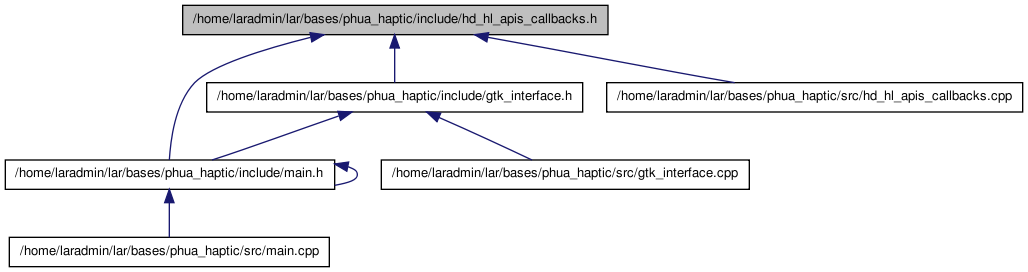
hd_hl_apis_callbacks.h file for this module. Contains includes, prototypes and global vars. More...
#include <HD/hd.h>#include <HDU/hduVector.h>#include <HDU/hduError.h>#include <HDU/hduMatrix.h>#include <HL/hl.h>#include <HLU/hlu.h>#include <HDU/hdu.h>#include <HDU/hduMath.h>#include <stdlib.h>#include <stdio.h>#include <boost/lexical_cast.hpp>#include <boost/format.hpp>#include <types.h>#include <miscellaneous.h>#include <armadillo>#include <hd_hl_apis_aux.h>#include <haptic_rendering_funx.h>
Go to the source code of this file.
|
| |
| #define | PHANToM_TOOLTIP_MASS 0.047 |
| HDCallbackCode HDCALLBACK | CalibrationCallback (void *pUserData) |
| Callback for device calibration. | |
| HDCallbackCode HDCALLBACK | copyDeviceDataCallback (void *pUserData) |
| Callback to update device data structure with the relevant parameters. | |
| HDCallbackCode HDCALLBACK | forcefeedbackCallback (void *pUserData) |
| Callback to update the force feedback of the joystick. | |
| HDCallbackCode HDCALLBACK | updateDeviceCallback (void *pUserData) |
| Callback for max priority servo loop update. | |
| HDCallbackCode HDCALLBACK | updateDeviceParametersCallback (void *pUserData) |
| Callback for retrieving device specific parameters. | |
hd_hl_apis_callbacks.h file for this module. Contains includes, prototypes and global vars.
Definition in file hd_hl_apis_callbacks.h.
| #define PHANToM_TOOLTIP_MASS 0.047 |
Definition at line 74 of file hd_hl_apis_callbacks.h.
| HDCallbackCode HDCALLBACK CalibrationCallback | ( | void * | pUserData | ) |
Callback for device calibration.
This function is PHANToM OMNI specific, for each device can have a different calibration method.
| pUserData | a pointer to a structure. |
Definition at line 519 of file hd_hl_apis_callbacks.cpp.
| HDCallbackCode HDCALLBACK copyDeviceDataCallback | ( | void * | pUserData | ) |
Callback to update device data structure with the relevant parameters.
This function is a callback that runs whenever the haptic loop starts and updates the device data structure with the relevant parameters chosen by the user.
| pUserData | a pointer to a structure. |
Definition at line 107 of file hd_hl_apis_callbacks.cpp.
| HDCallbackCode HDCALLBACK forcefeedbackCallback | ( | void * | pUserData | ) |
Callback to update the force feedback of the joystick.
This function is a callback that runs within the haptic loop. It checks the selected kinematic model and applys force whenever the chosen end point leaves the robot workspace.
| pUserData | a pointer to a structure. |
Definition at line 238 of file hd_hl_apis_callbacks.cpp.
| HDCallbackCode HDCALLBACK updateDeviceCallback | ( | void * | pUserData | ) |
Callback for max priority servo loop update.
This function is the max priority callback that runs in the servo loop thread. It updates the data structure with the current joystick values.
| pUserData | a pointer to a structure. |
Definition at line 41 of file hd_hl_apis_callbacks.cpp.
| HDCallbackCode HDCALLBACK updateDeviceParametersCallback | ( | void * | pUserData | ) |
Callback for retrieving device specific parameters.
This function is a callback executed once in the code that retrieves nominal maxmimum stiffness, damping, force and continuous force, specific for each device.
| pUserData | a pointer to a structure. |
Definition at line 88 of file hd_hl_apis_callbacks.cpp.

