Class para fazer o processamento da imagem. More...
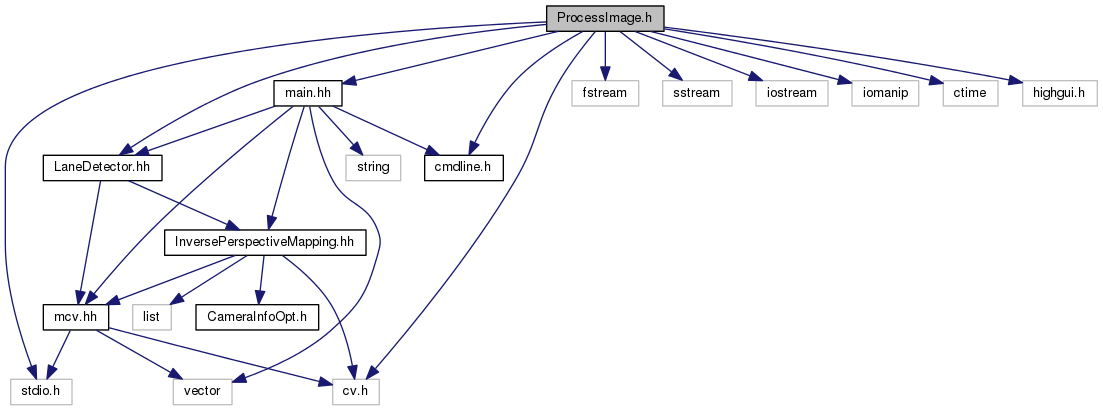
#include "main.hh"#include "cmdline.h"#include "LaneDetector.hh"#include <stdio.h>#include <fstream>#include <sstream>#include <iostream>#include <iomanip>#include <ctime>#include <cv.h>#include <highgui.h>
Include dependency graph for ProcessImage.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Procecess |
Macros | |
| #define | ERROR(fmt,...) (fprintf(stderr, "%s:%d error " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? -1 : -1) |
| #define | MSG(fmt,...) (fprintf(stdout, "%s:%d msg " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? 0 : 0) |
Detailed Description
Class para fazer o processamento da imagem.
- Date
- Maio 2013
- Parameters
-
filename the input file name cameraInfo the camera calibration info lanesConf the lane detection settings stoplinesConf the stop line detection settings options the command line arguments
Definition in file ProcessImage.h.
Macro Definition Documentation
| #define ERROR | ( | fmt, | |
| ... | |||
| ) | (fprintf(stderr, "%s:%d error " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? -1 : -1) |
Definition at line 62 of file ProcessImage.h.
| #define MSG | ( | fmt, | |
| ... | |||
| ) | (fprintf(stdout, "%s:%d msg " fmt "\n", __FILE__, __LINE__, ##__VA_ARGS__) ? 0 : 0) |
Definition at line 58 of file ProcessImage.h.