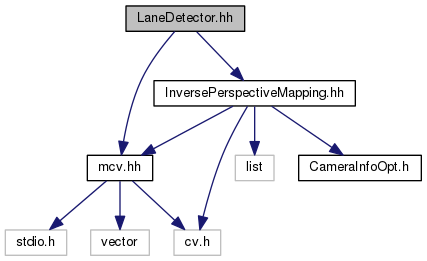
Include dependency graph for LaneDetector.hh:
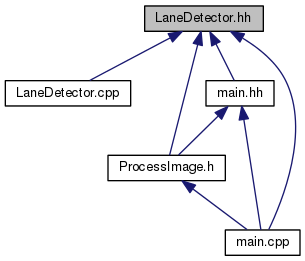
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | LaneDetector::LaneDetectorConf |
| Structure to hold lane detector settings. More... | |
| struct | LaneDetector::Line |
| Line structure with start and end points. More... | |
| struct | LaneDetector::LineState_ |
| struct | LaneDetector::Spline |
| Spline structure. More... | |
Namespaces | |
| LaneDetector | |
Macros | |
| #define | FILTER_LINE_HORIZONTAL 0 |
| #define | FILTER_LINE_VERTICAL 1 |
| #define | GROUPING_TYPE_HOUGH_LINES 1 |
| #define | GROUPING_TYPE_HV_LINES 0 |
| #define | HV_LINES_HORIZONTAL 0 |
| #define | HV_LINES_VERTICAL 1 |
Typedefs | |
| typedef enum LaneDetector::CheckSplineStatus_ | LaneDetector::CheckSplineStatus |
| typedef struct LaneDetector::LaneDetectorConf | LaneDetector::LaneDetectorConf |
| Structure to hold lane detector settings. More... | |
| typedef struct LaneDetector::Line | LaneDetector::Line |
| Line structure with start and end points. More... | |
| typedef enum LaneDetector::LineColor_ | LaneDetector::LineColor |
| Line color. More... | |
| typedef struct LaneDetector::LineState_ | LaneDetector::LineState |
| typedef enum LaneDetector::LineType_ | LaneDetector::LineType |
| Line type. More... | |
| typedef struct LaneDetector::Spline | LaneDetector::Spline |
| Spline structure. More... | |
Enumerations | |
| enum | LaneDetector::CheckSplineStatus_ { LaneDetector::ShortSpline = 0x1, LaneDetector::CurvedSpline = 0x2, LaneDetector::CurvedSplineTheta = 0x4, LaneDetector::HorizontalSpline = 0x8 } |
| enum | LaneDetector::LineColor_ { LaneDetector::LINE_COLOR_NONE, LaneDetector::LINE_COLOR_YELLOW, LaneDetector::LINE_COLOR_WHITE } |
| Line color. More... | |
| enum | LaneDetector::LineType_ { LaneDetector::LINE_HORIZONTAL = 0, LaneDetector::LINE_VERTICAL = 1 } |
| Line type. More... | |
Functions | |
| CvPoint2D32f | LaneDetector::mcvAddVector (CvPoint2D32f v1, CvPoint2D32f v2) |
| void | LaneDetector::mcvBinarizeImage (CvMat *inImage) |
| void | LaneDetector::mcvCheckLaneWidth (vector< Line > &lines, vector< float > &scores, float wMu, float wSigma) |
| This function takes a bunch of lines, and check which 2 lines can make a lane. More... | |
| bool | LaneDetector::mcvCheckMergeLines (const Line &line1, const Line &line2, float thetaThreshold, float rThreshold) |
| bool | LaneDetector::mcvCheckMergeSplines (const Spline &sp1, const Spline &sp2, float thetaThreshold, float rThreshold, float meanThetaThreshold, float meanRThreshold, float centroidThreshold) |
| int | LaneDetector::mcvCheckPoints (const CvMat *points) |
| int | LaneDetector::mcvCheckSpline (const Spline &spline, float curvenessThreshold, float lengthThreshold, float thetaDiffThreshold, float thetaThreshold) |
| int | LaneDetector::mcvChooseBestPeak (const vector< CvPoint2D32f > &peaks, const vector< float > &peakVals, CvPoint2D32f &peak, float &peakVal, float contThreshold, const CvPoint2D32f &tangent, const CvPoint2D32f &prevPoint, float angleThreshold) |
| void | LaneDetector::mcvCumSum (const CvMat *inMat, CvMat *outMat) |
| void | LaneDetector::mcvDrawLine (CvMat *image, Line line, CvScalar color, int width) |
| void | LaneDetector::mcvDrawRectangle (CvMat *image, CvRect rect, CvScalar color, int width) |
| void | LaneDetector::mcvDrawSpline (CvMat *image, Spline spline, CvScalar color, int width) |
| void | LaneDetector::mcvDrawText (CvMat *image, char *str, CvPoint point, float size, CvScalar color) |
| CvMat * | LaneDetector::mcvEvalBezierSpline (const Spline &spline, float h, CvMat *tangents) |
| CvMat * | LaneDetector::mcvExtendPoints (const CvMat *im, const CvMat *inPoints, float angleThreshold, float meanDirAngleThreshold, int linePixelsTangent, int linePixelsNormal, float contThreshold, int deviationThreshold, CvRect bbox, bool smoothPeaks) |
| void | LaneDetector::mcvFilterLines (const CvMat *inImage, CvMat *outImage, unsigned char wx, unsigned char wy, FLOAT sigmax, FLOAT sigmay, LineType lineType) |
| Spline | LaneDetector::mcvFitBezierSpline (CvMat *points, int degree) |
| void | LaneDetector::mcvFitRansacLine (const CvMat *image, int numSamples, int numIterations, float threshold, float scoreThreshold, int numGoodFit, bool getEndPoints, LineType lineType, Line *lineXY, float *lineRTheta, float *lineScore) |
| void | LaneDetector::mcvFitRansacSpline (const CvMat *image, int numSamples, int numIterations, float threshold, float scoreThreshold, int numGoodFit, int splineDegree, float h, Spline *spline, float *splineScore, int splineScoreJitter, float splineScoreLengthRatio, float splineScoreAngleRatio, float splineScoreStep, vector< Spline > *prevSplines) |
| void | LaneDetector::mcvFitRobustLine (const CvMat *points, float *lineRTheta, float *lineAbc) |
| void | LaneDetector::mcvGet2DerivativeGaussianKernel (CvMat *kernel, unsigned char w, FLOAT sigma) |
| CvMat * | LaneDetector::mcvGetBezierSplinePixels (Spline &spline, float h, CvSize box, bool extendSpline) |
| Line | LaneDetector::mcvGetExtendedNormalLine (CvPoint2D32f &curPoint, CvPoint2D32f &tangent, int linePixelsTangent, int linePixelsNormal, CvPoint2D32f &nextPoint) |
| void | LaneDetector::mcvGetGaussianKernel (CvMat *kernel, unsigned char w, FLOAT sigma) |
| void | LaneDetector::mcvGetHoughTransformLines (const CvMat *inImage, vector< Line > *lines, vector< FLOAT > *lineScores, FLOAT rMin, FLOAT rMax, FLOAT rStep, FLOAT thetaMin, FLOAT thetaMax, FLOAT thetaStep, bool binarize, bool localMaxima, FLOAT detectionThreshold, bool smoothScores, bool group, FLOAT groupThreshold) |
| void | LaneDetector::mcvGetHVLines (const CvMat *inImage, vector< Line > *lines, vector< FLOAT > *lineScores, LineType lineType, FLOAT linePixelWidth, bool binarize, bool localMaxima, FLOAT detectionThreshold, bool smoothScores) |
| vector< int > | LaneDetector::mcvGetJitterVector (int maxJitter) |
| void | LaneDetector::mcvGetLanes (const CvMat *inImage, const CvMat *clrImage, vector< Line > *lanes, vector< FLOAT > *lineScores, vector< Spline > *splines, vector< float > *splineScores, CameraInfo *cameraInfo, LaneDetectorConf *stopLineConf, LineState *state) |
| float | LaneDetector::mcvGetLineAngle (const Line &line) |
| void | LaneDetector::mcvGetLineExtent (const CvMat *im, const Line &inLine, Line &outLine) |
| float | LaneDetector::mcvGetLinePeak (const CvMat *im, const Line &line, vector< CvPoint2D32f > &peaks, vector< float > &peakVals, bool positivePeak, bool smoothPeaks) |
| CvMat * | LaneDetector::mcvGetLinePixels (const Line &line) |
| void | LaneDetector::mcvGetLines (const CvMat *image, LineType lineType, vector< Line > &lines, vector< float > &lineScores, vector< Spline > &splines, vector< float > &splineScores, LaneDetectorConf *lineConf, LineState *state) |
| void | LaneDetector::mcvGetLinesBoundingBoxes (const vector< Line > &lines, LineType type, CvSize size, vector< CvRect > &boxes) |
| This function extracts bounding boxes from lines. More... | |
| double | LaneDetector::mcvGetLocalMaxSubPixel (double val1, double val2, double val3) |
| void | LaneDetector::mcvGetMatLocalMax (const CvMat *inMat, vector< double > &localMaxima, vector< CvPoint > &localMaximaLoc, double threshold) |
| void | LaneDetector::mcvGetMatMax (const CvMat *inMat, vector< double > &maxima, vector< CvPoint > &maximaLoc, double threshold) |
| CvMat * | LaneDetector::mcvGetNonZeroPoints (const CvMat *inMat, bool floatMat) |
| LineColor | LaneDetector::mcvGetPointsColor (const CvMat *im, const CvMat *points, int window, float numYellowMin, float rgMin, float rgMax, float gbMin, float rbMin, bool rbf, float rbfThreshold) |
| void | LaneDetector::mcvGetPointsFeatures (const CvMat *points, CvPoint2D32f *centroid, float *theta, float *r, float *length, float *meanTheta, float *meanR, float *curveness) |
| CvPoint2D32f | LaneDetector::mcvGetPointsMeanVector (const CvMat *points, bool forward) |
| FLOAT | LaneDetector::mcvGetQuantile (const CvMat *mat, FLOAT qtile) |
| void | LaneDetector::mcvGetRansacLines (const CvMat *im, vector< Line > &lines, vector< float > &lineScores, LaneDetectorConf *lineConf, LineType lineType) |
| void | LaneDetector::mcvGetRansacSplines (const CvMat *im, vector< Line > &lines, vector< float > &lineScores, LaneDetectorConf *lineConf, LineType lineType, vector< Spline > &splines, vector< float > &splineScores, LineState *state) |
| void | LaneDetector::mcvGetSplineFeatures (const Spline &spline, CvPoint2D32f *centroid, float *theta, float *r, float *length, float *meanTheta, float *meanR, float *curveness) |
| void | LaneDetector::mcvGetSplinesBoundingBoxes (const vector< Spline > &splines, LineType type, CvSize size, vector< CvRect > &boxes) |
| This function extracts bounding boxes from splines. More... | |
| float | LaneDetector::mcvGetSplineScore (const CvMat *image, Spline &spline, float h, int jitterVal, float lengthRatio, float angleRatio) |
| void | LaneDetector::mcvGetStopLines (const CvMat *inImage, vector< Line > *stopLines, vector< float > *lineScores, const CameraInfo *cameraInfo, LaneDetectorConf *stopLineConf) |
| void | LaneDetector::mcvGetVectorLocalMax (const CvMat *inVec, vector< double > &localMaxima, vector< int > &localMaximaLoc) |
| void | LaneDetector::mcvGetVectorMax (const CvMat *inVector, double *max, int *maxLoc, int ignore) |
| float | LaneDetector::mcvGetVectorNorm (const CvPoint2D32f &v) |
| void | LaneDetector::mcvGroupBoundingBoxes (vector< CvRect > &boxes, LineType type, float groupThreshold) |
| This function groups together bounding boxes. More... | |
| void | LaneDetector::mcvGroupLines (vector< Line > &lines, vector< float > &lineScores, float groupThreshold, CvSize bbox) |
| void | LaneDetector::mcvGroupSplines (vector< Spline > &splines, vector< float > &scores) |
| void | LaneDetector::mcvInitLaneDetectorConf (char *const fileName, LaneDetectorConf *stopLineConf) |
| void | LaneDetector::mcvIntersectLineRThetaWithBB (FLOAT r, FLOAT theta, const CvSize bbox, Line *outLine) |
| void | LaneDetector::mcvIntersectLineRThetaWithRect (FLOAT r, FLOAT theta, const Line &rect, Line &outLine) |
| void | LaneDetector::mcvIntersectLineWithBB (const Line *inLine, const CvSize bbox, Line *outLine) |
| bool | LaneDetector::mcvIsPointInside (FLOAT_POINT2D point, CvSize bbox) |
| bool | LaneDetector::mcvIsPointInside (FLOAT_POINT2D &point, const Line &rect) |
| bool | LaneDetector::mcvIsPointInside (FLOAT_POINT2D &point, const CvRect &rect) |
| bool | LaneDetector::mcvIsValidPeak (const CvPoint2D32f &peak, const CvPoint2D32f &tangent, const CvPoint2D32f &prevPoint, float angleThreshold) |
| void | LaneDetector::mcvLines2Mat (const vector< Line > *lines, CvMat *mat) |
| void | LaneDetector::mcvLinesImIPM2Im (vector< Line > &lines, IPMInfo &ipmInfo, CameraInfo &cameraInfo, CvSize imSize) |
| void | LaneDetector::mcvLineXY2RTheta (const Line &line, float &r, float &theta) |
| Spline | LaneDetector::mcvLineXY2Spline (const Line &line, int degree) |
| void | LaneDetector::mcvLocalizePoints (const CvMat *im, const CvMat *inPoints, CvMat *outPoints, int numLinePixels, float angleThreshold) |
| void | LaneDetector::mcvMat2Lines (const CvMat *mat, vector< Line > *lines) |
| void | LaneDetector::mcvMatInt2Float (const CvMat *inMat, CvMat *outMat) |
| CvPoint2D32f | LaneDetector::mcvMultiplyVector (CvPoint2D32f v, float s) |
| CvPoint2D32f | LaneDetector::mcvNormalizeVector (const CvPoint2D32f &v) |
| CvPoint2D32f | LaneDetector::mcvNormalizeVector (const CvPoint &v) |
| CvPoint2D32f | LaneDetector::mcvNormalizeVector (float x, float y) |
| void | LaneDetector::mcvPostprocessLines (const CvMat *image, const CvMat *clrImage, const CvMat *rawipm, const CvMat *fipm, vector< Line > &lines, vector< float > &lineScores, vector< Spline > &splines, vector< float > &splineScores, LaneDetectorConf *lineConf, LineState *state, IPMInfo &ipmInfo, CameraInfo &cameraInfo) |
| void | LaneDetector::mcvSampleWeighted (const CvMat *cumSum, int numSamples, CvMat *randInd, CvRNG *rng) |
| void | LaneDetector::mcvSetMat (CvMat *inMat, CvRect mask, double val) |
| void | LaneDetector::mcvSortPoints (const CvMat *inPoints, CvMat *outPoints, int dim, int dir) |
| void | LaneDetector::mcvSplinesImIPM2Im (vector< Spline > &splines, IPMInfo &ipmInfo, CameraInfo &cameraInfo, CvSize imSize) |
| CvPoint2D32f | LaneDetector::mcvSubtractVector (const CvPoint2D32f &v1, const CvPoint2D32f &v2) |
| void | LaneDetector::mcvThresholdLower (const CvMat *inMat, CvMat *outMat, FLOAT threshold) |
| void | LaneDetector::SHOW_LINE (const Line line, char str[]) |
| void | LaneDetector::SHOW_SPLINE (const Spline spline, char str[]) |
Detailed Description
- Date
- Thu 26 Jul, 2007
Definition in file LaneDetector.hh.
Macro Definition Documentation
| #define FILTER_LINE_HORIZONTAL 0 |
This function filters the input image looking for horizontal or vertical lines with specific width or height.
- Parameters
-
inImage the input image outImage the output image in IPM wx width of kernel window in x direction = 2*wx+1 (default 2) wy width of kernel window in y direction = 2*wy+1 (default 2) sigmax std deviation of kernel in x (default 1) sigmay std deviation of kernel in y (default 1) lineType type of the line LINE_HORIZONTAL (default) LINE_VERTICAL
Definition at line 358 of file LaneDetector.hh.
| #define FILTER_LINE_VERTICAL 1 |
Definition at line 359 of file LaneDetector.hh.
| #define GROUPING_TYPE_HOUGH_LINES 1 |
Definition at line 81 of file LaneDetector.hh.
| #define GROUPING_TYPE_HV_LINES 0 |
Definition at line 80 of file LaneDetector.hh.
| #define HV_LINES_HORIZONTAL 0 |
This function groups the input filtered image into horizontal or vertical lines.
- Parameters
-
inImage input image lines returned detected lines (vector of points) lineScores scores of the detected lines (vector of floats) lineType type of lines to detect LINE_HORIZONTAL (default) or LINE_VERTICAL linePixelWidth width (or height) of lines to detect localMaxima whether to detect local maxima or just get the maximum detectionThreshold threshold for detection
Definition at line 378 of file LaneDetector.hh.
| #define HV_LINES_VERTICAL 1 |
Definition at line 379 of file LaneDetector.hh.