class which evaluates the trajectories planned More...
#include <ros/ros.h>#include <stdio.h>#include <vector>#include <math.h>#include <visualization_msgs/Marker.h>#include <visualization_msgs/MarkerArray.h>#include <tf/transform_listener.h>#include <pcl_ros/transforms.h>#include <pcl/conversions.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/segmentation/extract_polygonal_prism_data.h>#include <pcl/filters/extract_indices.h>#include <pcl/filters/project_inliers.h>#include <pcl/filters/voxel_grid.h>#include <numeric>#include <trajectory_planner/c_trajectory.h>#include <mtt/TargetListPC.h>#include <trajectory_planner/traj_info.h>#include <pcl_conversions/pcl_conversions.h>
Include dependency graph for c_manage_trajectory.h:

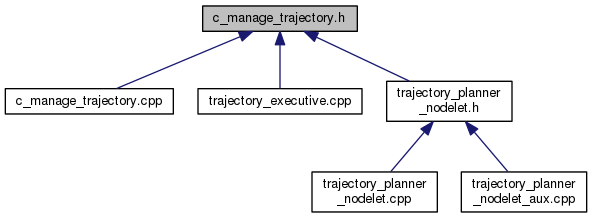
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | c_manage_trajectory |
| struct | t_desired_coordinates |
| struct | t_obstacle |
Macros | |
| #define | _SPEED_REQUIRED_ 0.25 |
| #define | _SPEED_SAFFETY_ 0.05 |
| #define | _TRAJECTORY_LIB_DEBUG_ 1 |
| #define | _USE_MATH_DEFINES |
| #define | COLLINEAR 2 |
| #define | DO_INTERSECT 1 |
| #define | DONT_INTERSECT 0 |
Typedefs | |
| typedef boost::shared_ptr < c_manage_trajectory > | c_manage_trajectoryPtr |
Detailed Description
class which evaluates the trajectories planned
- Version
- v0
- Date
- 2012-05-10
Definition in file c_manage_trajectory.h.
Macro Definition Documentation
| #define _SPEED_REQUIRED_ 0.25 |
Definition at line 79 of file c_manage_trajectory.h.
| #define _SPEED_SAFFETY_ 0.05 |
Definition at line 80 of file c_manage_trajectory.h.
| #define _TRAJECTORY_LIB_DEBUG_ 1 |
Definition at line 82 of file c_manage_trajectory.h.
| #define _USE_MATH_DEFINES |
Definition at line 81 of file c_manage_trajectory.h.
| #define COLLINEAR 2 |
Definition at line 78 of file c_manage_trajectory.h.
| #define DO_INTERSECT 1 |
Definition at line 77 of file c_manage_trajectory.h.
| #define DONT_INTERSECT 0 |
Definition at line 76 of file c_manage_trajectory.h.
Typedef Documentation
| typedef boost::shared_ptr<c_manage_trajectory> c_manage_trajectoryPtr |
Definition at line 142 of file c_manage_trajectory.h.