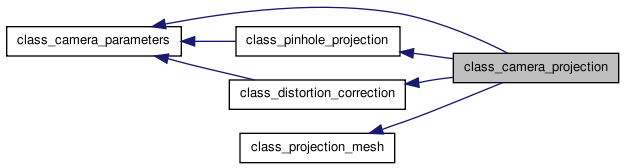
The class camera projection. Provides functionalities to perform projection of an image into a polygon plane. More...
#include <camera_projection.h>
Public Member Functions | |
| class_camera_projection (void) | |
| Constructor. | |
| int | compute_pixel_list_to_vertex_list (pcl::ModelCoefficientsPtr coeff) |
| void | compute_projectable_pixels (void) |
| int | create_image_canvas (const cv::Mat *image, std::vector< pcl::PointXY > *pts) |
| Creates the image canvas pixels list and stores it to. | |
| int | create_image_canvas_for_known_camera (const cv::Mat *image, std::vector< pcl::PointXY > *pts, std::string name) |
| int | create_polygon_from_pts_list (const pcl::PointCloud< pcl::PointXYZ > *vertexes, pcl::PointCloud< pcl::PointXYZ > *vertices) |
| int | draw_pixels_projectable (cv::Mat *image, pcl::PointCloud< pcl::PointXYZRGB > *pc, const cv::Scalar color, int thickness=1) |
| int | draw_pixels_vector (cv::Mat *image, std::vector< pcl::PointXY > *pts, const cv::Scalar color, int thickness=1) |
| int | draw_pixels_vector_as_polyline (cv::Mat *image, std::vector< pcl::PointXY > *pts, const cv::Scalar color, int thickness) |
| float | get_weight_for_pixel (int l, int c, double resolution_factor, float px, float py, float pz) |
| int | set_image (const cv::Mat *image, ros::Time time, std::string name="none") |
| Sets the image to be projected. Also computes the canvas, canny and grid masks. | |
| int | set_vertex_chull (const pcl::PointCloud< pcl::PointXYZ >::Ptr vertexes) |
| ~class_camera_projection (void) | |
| The destrictor. Does nothing. | |
Public Attributes | |
| std::vector< float > | face_weight |
| cv::Mat | image_corrected |
| cv::Mat | image_gray |
| cv::Mat | image_gui |
| cv::Mat | image_original |
| bool | is_mapped_to_mesh |
| cv::Mat | mask_canny |
| cv::Mat | mask_grid |
| cv::Mat | mask_intersection |
| cv::Mat | mask_projectable_pixels |
| pcl::PointCloud< pcl::PointXYZRGB > | pixel_list |
| std::vector< pcl::PointXY > | pixels_intersection |
| pcl::PointCloud< pcl::PointXYZRGB > | pixels_projectable |
| std::string | projection_name |
| pcl::PointCloud< pcl::PointXYZ > | vertex_canvas |
| pcl::PointCloud< pcl::PointXYZ > | vertex_chull |
| pcl::PointCloud< pcl::PointXYZ > | vertex_intersection |
| pcl::PointCloud< pcl::PointXYZRGB > | vertex_list |
| pcl::PointCloud< pcl::PointXYZRGB > | vertex_projectable |
The class camera projection. Provides functionalities to perform projection of an image into a polygon plane.
Definition at line 69 of file camera_projection.h.
| class_camera_projection::class_camera_projection | ( | void | ) | [inline] |
Constructor.
Definition at line 79 of file camera_projection.h.
| class_camera_projection::~class_camera_projection | ( | void | ) | [inline] |
The destrictor. Does nothing.
Definition at line 84 of file camera_projection.h.
| std::vector<float> class_camera_projection::face_weight |
Definition at line 146 of file camera_projection.h.
Definition at line 123 of file camera_projection.h.
Definition at line 127 of file camera_projection.h.
Definition at line 124 of file camera_projection.h.
Definition at line 122 of file camera_projection.h.
Definition at line 148 of file camera_projection.h.
Definition at line 128 of file camera_projection.h.
Definition at line 129 of file camera_projection.h.
Definition at line 130 of file camera_projection.h.
Definition at line 131 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZRGB> class_camera_projection::pixel_list |
Definition at line 144 of file camera_projection.h.
| std::vector<pcl::PointXY> class_camera_projection::pixels_intersection |
Definition at line 137 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZRGB> class_camera_projection::pixels_projectable |
Definition at line 138 of file camera_projection.h.
| std::string class_camera_projection::projection_name |
Definition at line 121 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZ> class_camera_projection::vertex_canvas |
Definition at line 134 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZ> class_camera_projection::vertex_chull |
Definition at line 135 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZ> class_camera_projection::vertex_intersection |
Definition at line 136 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZRGB> class_camera_projection::vertex_list |
Definition at line 145 of file camera_projection.h.
| pcl::PointCloud<pcl::PointXYZRGB> class_camera_projection::vertex_projectable |
Definition at line 139 of file camera_projection.h.

