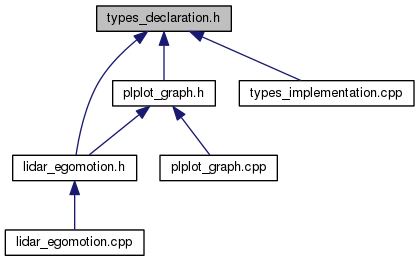
Generic types declaration for use in the lidar_egomotion algorithm. More...
#include <iostream>#include <iomanip>#include <boost/shared_ptr.hpp>#include <boost/bind.hpp>#include <vector>#include <ros/ros.h>#include <opencv/cv.h>#include <opencv/cxcore.h>#include <opencv/cxcore.hpp>#include <pcl/point_cloud.h>#include <pcl/point_types.h>
Go to the source code of this file.
Classes | |
| struct | ray_config_t |
| struct | ray_definition |
| struct | ray_history |
| struct | ray_measurment_t |
| struct | s_pose |
| struct | t_flag |
| This structure contains global flags parameters. More... | |
| struct | t_fps |
Macros | |
| #define | deg2rad(a) (a*M_PI/180.) |
| #define | rad2deg(a) (a*180./M_PI) |
Typedefs | |
| typedef struct s_pose | t_pose |
| typedef boost::shared_ptr< t_pose > | t_posePtr |
Functions | |
| void | AddToHistory (ray_definition *rays, ray_history *h_rays) |
| void | ClearRays (ray_measurment_t *rays, ray_config_t *ray_config) |
| void | ClearRays (ray_definition *src) |
| void | CopyRays (ray_config_t *cfg, ray_measurment_t *src, ray_measurment_t *dst) |
| void | CopyRays (ray_definition *src, ray_definition *dst) |
| double | get_fps (double dt, t_fps *acc) |
| double | get_m_phi (t_pose &i) |
| double | get_m_vl (t_pose &i) |
| double | get_orientation (t_pose &i) |
| double | get_phi (t_pose &i) |
| double | get_vl (t_pose &i) |
| void | InitRayDefinition (ray_definition *src) |
| void | InitRayHistory (ray_history *h_rays) |
| double | max_orientation (const std::vector< t_posePtr > &vec) |
| double | max_x (const std::vector< t_posePtr > &vec) |
| double | max_y (const std::vector< t_posePtr > &vec) |
| double | min_orientation (const std::vector< t_posePtr > &vec) |
| double | min_x (const std::vector< t_posePtr > &vec) |
| double | min_y (const std::vector< t_posePtr > &vec) |
| void | PointCloud2Ray (pcl::PointCloud< pcl::PointXYZ > &point_cloud, ray_definition *dst) |
| void | Pointcloud2Rays (pcl::PointCloud< pcl::PointXYZ > &point_cloud, ray_config_t *config, ray_measurment_t *rays) |
| void | RemoveOverlappingPoints (ray_config_t *config, ray_measurment_t *rays) |
| void | RemoveOverlappingPoints (ray_definition *src) |
| int | Theta2Index (double theta, ray_config_t *config) |
Detailed Description
Generic types declaration for use in the lidar_egomotion algorithm.
Definition in file types_declaration.h.
Macro Definition Documentation
| #define deg2rad | ( | a | ) | (a*M_PI/180.) |
Definition at line 49 of file types_declaration.h.
| #define rad2deg | ( | a | ) | (a*180./M_PI) |
Definition at line 50 of file types_declaration.h.
Typedef Documentation
Definition at line 136 of file types_declaration.h.
Function Documentation
| void AddToHistory | ( | ray_definition * | rays, |
| ray_history * | h_rays | ||
| ) |
Definition at line 312 of file types_implementation.cpp.
| void ClearRays | ( | ray_measurment_t * | rays, |
| ray_config_t * | ray_config | ||
| ) |
Definition at line 237 of file types_implementation.cpp.
| void ClearRays | ( | ray_definition * | src | ) |
Definition at line 243 of file types_implementation.cpp.
| void CopyRays | ( | ray_config_t * | cfg, |
| ray_measurment_t * | src, | ||
| ray_measurment_t * | dst | ||
| ) |
Definition at line 288 of file types_implementation.cpp.
| void CopyRays | ( | ray_definition * | src, |
| ray_definition * | dst | ||
| ) |
Definition at line 275 of file types_implementation.cpp.
| double get_fps | ( | double | dt, |
| t_fps * | acc | ||
| ) |
Definition at line 333 of file types_implementation.cpp.
| double get_m_phi | ( | t_pose & | i | ) |
Definition at line 34 of file types_implementation.cpp.
| double get_m_vl | ( | t_pose & | i | ) |
Definition at line 39 of file types_implementation.cpp.
| double get_orientation | ( | t_pose & | i | ) |
Definition at line 49 of file types_implementation.cpp.
| double get_phi | ( | t_pose & | i | ) |
Definition at line 44 of file types_implementation.cpp.
| double get_vl | ( | t_pose & | i | ) |
Definition at line 54 of file types_implementation.cpp.
| void InitRayDefinition | ( | ray_definition * | src | ) |
Definition at line 254 of file types_implementation.cpp.
| void InitRayHistory | ( | ray_history * | h_rays | ) |
Definition at line 306 of file types_implementation.cpp.
| double max_orientation | ( | const std::vector< t_posePtr > & | vec | ) |
Definition at line 59 of file types_implementation.cpp.
| double max_x | ( | const std::vector< t_posePtr > & | vec | ) |
Definition at line 83 of file types_implementation.cpp.
| double max_y | ( | const std::vector< t_posePtr > & | vec | ) |
Definition at line 107 of file types_implementation.cpp.
| double min_orientation | ( | const std::vector< t_posePtr > & | vec | ) |
Definition at line 71 of file types_implementation.cpp.
| double min_x | ( | const std::vector< t_posePtr > & | vec | ) |
Definition at line 95 of file types_implementation.cpp.
| double min_y | ( | const std::vector< t_posePtr > & | vec | ) |
Definition at line 119 of file types_implementation.cpp.
| void PointCloud2Ray | ( | pcl::PointCloud< pcl::PointXYZ > & | point_cloud, |
| ray_definition * | dst | ||
| ) |
Definition at line 223 of file types_implementation.cpp.
| void Pointcloud2Rays | ( | pcl::PointCloud< pcl::PointXYZ > & | point_cloud, |
| ray_config_t * | config, | ||
| ray_measurment_t * | rays | ||
| ) |
Definition at line 181 of file types_implementation.cpp.
| void RemoveOverlappingPoints | ( | ray_config_t * | config, |
| ray_measurment_t * | rays | ||
| ) |
Definition at line 132 of file types_implementation.cpp.
| void RemoveOverlappingPoints | ( | ray_definition * | src | ) |
Definition at line 160 of file types_implementation.cpp.
| int Theta2Index | ( | double | theta, |
| ray_config_t * | config | ||
| ) |
Definition at line 171 of file types_implementation.cpp.