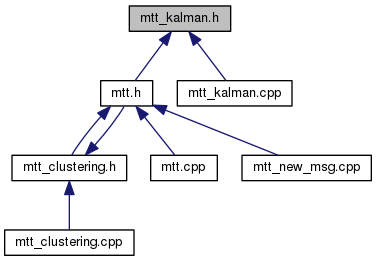
Kalman estimation related functions header. More...
#include "mtt_common.h"
Go to the source code of this file.
Functions | |
| void | AddPointPath (t_path *path, double x, double y) |
| void | AllocMotionModels (t_list &list, t_config &config) |
| CvKalman * | CreateModelCTRV (void) |
| CvKalman * | CreateModelCV (void) |
| CvKalman * | CreateModelCV_SC (void) |
| CvKalman * | CreateModelFwdCt (void) |
| void | dA_FwdCt (CvKalman *model, double q[6], double dt, double l=2.54) |
| void | dH_FwdCt (CvKalman *model) |
| void | GetErrorConvariance (t_errors *error) |
| Get covariance. More... | |
| void | IterateMotionModelCTRV (CvKalman *model, double vm, double wm) |
| void | IterateMotionModelCV (CvKalman *model, double vxm, double vym) |
| double | IterateMotionModelCV_SC (CvKalman *model, double vm) |
| void | IterateMotionModelFwdCt (CvKalman *model, double z[2]) |
| void | MotionModelsIteration (vector< t_listPtr > &list, t_config &config) |
| double | point2line_distance (double alpha, double ro, double x, double y) |
| Calculates the line to point distance. More... | |
| int | real2print (double x, t_config *config) |
| void | SetSearchArea (t_list &list, t_config &config) |
| void | UpdateTransitionMatrixCTRV (CvKalman *model, double, double, double t, double v, double w, double dt) |
| void | UpdateTransitionMatrixCV (CvKalman *model, double dt) |
| void | UpdateTransitionMatrixCV_SC (CvKalman *model, double dt) |
Variables | |
| FILE * | fp |
| double | grxy |
| double | s [6] |
| int | select_object |
| double | theta |
| double | vel |
Detailed Description
Kalman estimation related functions header.
Definition in file mtt_kalman.h.
Function Documentation
| void AddPointPath | ( | t_path * | path, |
| double | x, | ||
| double | y | ||
| ) |
Definition at line 319 of file mtt_association.cpp.
Definition at line 415 of file mtt_kalman.cpp.
| CvKalman* CreateModelCTRV | ( | void | ) |
Definition at line 638 of file mtt_kalman.cpp.
| CvKalman* CreateModelCV | ( | void | ) |
Definition at line 706 of file mtt_kalman.cpp.
| CvKalman* CreateModelCV_SC | ( | void | ) |
Definition at line 674 of file mtt_kalman.cpp.
| CvKalman* CreateModelFwdCt | ( | void | ) |
Definition at line 757 of file mtt_kalman.cpp.
| void dA_FwdCt | ( | CvKalman * | model, |
| double | q[6], | ||
| double | dt, | ||
| double | l = 2.54 |
||
| ) |
Definition at line 1037 of file mtt_kalman.cpp.
| void dH_FwdCt | ( | CvKalman * | model | ) |
Definition at line 1026 of file mtt_kalman.cpp.
| void GetErrorConvariance | ( | t_errors * | error | ) |
Get covariance.
- Returns
- void
Initalise auxiliar matrixes
Set accumulators to 0
Do Cov(Innovation) = 1/m * S(i=0,i< m-1,d[k-i]*d[k-i]') and Cov(Residue) = 1/m * S(i=0,i< m-1,e[k-i]*e[k-i]')
- Todo:
- Wend the number of points is growing the covariance is way to big, i don't realy know why
Definition at line 508 of file mtt_kalman.cpp.
| void IterateMotionModelCTRV | ( | CvKalman * | model, |
| double | vm, | ||
| double | wm | ||
| ) |
Definition at line 780 of file mtt_kalman.cpp.
| void IterateMotionModelCV | ( | CvKalman * | model, |
| double | vxm, | ||
| double | vym | ||
| ) |
Definition at line 913 of file mtt_kalman.cpp.
| double IterateMotionModelCV_SC | ( | CvKalman * | model, |
| double | vm | ||
| ) |
Definition at line 874 of file mtt_kalman.cpp.
| void IterateMotionModelFwdCt | ( | CvKalman * | model, |
| double | z[2] | ||
| ) |
Definition at line 842 of file mtt_kalman.cpp.
If the object is new, we set the prestate and poststate, given that this is not a new measurement, of the filter to the current measurement
Get the new measurement into the filter and correct, t=k
Extract the correct state from the filter and put it to path[k]
After correction iterate the filter to make a prediction, t=k+1
Extract the prediction from the filter
Obtain error vectors
Add estimated point to path
Put velocity into data file
Obtain velocity
Put lateral error into data file
Put error cov and AKF gains into data file
Define a new search area based on the kalman errors and predicted position
Do some tweaks on the kalman errors
- Update white noise scale **************************/
Only update if the object is visible
Definition at line 64 of file mtt_kalman.cpp.
| double point2line_distance | ( | double | alpha, |
| double | ro, | ||
| double | x, | ||
| double | y | ||
| ) |
Calculates the line to point distance.
- Parameters
-
alpha polar coordinates of the line ro polar coordinates of the line x cartesian coordinates of the point y
- Returns
- algebric distance
Definition at line 66 of file line_fitting.cpp.
| int real2print | ( | double | x, |
| t_config * | config | ||
| ) |
Small bonus to new objects
- Todo:
- I should use a equation that allowed a more soft transition
Definition at line 252 of file mtt_association.cpp.
| void UpdateTransitionMatrixCTRV | ( | CvKalman * | model, |
| double | , | ||
| double | , | ||
| double | t, | ||
| double | v, | ||
| double | w, | ||
| double | dt | ||
| ) |
Definition at line 1156 of file mtt_kalman.cpp.
| void UpdateTransitionMatrixCV | ( | CvKalman * | model, |
| double | dt | ||
| ) |
Definition at line 975 of file mtt_kalman.cpp.
| void UpdateTransitionMatrixCV_SC | ( | CvKalman * | model, |
| double | dt | ||
| ) |
Definition at line 955 of file mtt_kalman.cpp.
Variable Documentation
| FILE* fp |
| double grxy |
| double s[6] |
| int select_object |
Definition at line 36 of file mtt_kalman.cpp.
| double theta |
| double vel |