error_analisys.m File Reference
Functions | |
| Ix Iy CIx CIy Rx Ry CRx CRy x y | norm (v) direction(v) Gpx Gvx Gpy Gvy Qx%Qy time_lenght |
| Plot Erro hold on | title ('Residue error') |
| Plot Erro hold on | xlabel ('Time(normalised)') |
| Plot Erro hold on | ylabel ('Error/mm') plot(t |
| Plot Erro hold on residue_x | plot (t, residue_y,'r') mean_residue_x |
| legend (xL, yL,'Location','Best') figure | |
| hold on | title ('Innovation error') |
| hold on innovation_x | plot (t, innovation_y,'r') mean_innovation_x |
| hold on | title ('Residue error covariance(window size 15)') |
| hold on | ylabel ('Covariance') plot(t |
| hold on cov_residue_x | plot (t, cov_residue_y,'r') legend('X' |
| hold on cov_residue_x Y hold on | title ('Innovation error covariance(window size 15)') |
| hold on cov_residue_x Y hold on cov_innovation_x | plot (t, cov_innovation_y,'r') legend('X' |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on | title ('Kalman process noise') |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on | ylabel ('noise/mm') plot(t |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x | plot (t, process_noise_y,'r') legend('X' |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on | title ('Kalman Position Gain') |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on | ylabel ('Gain') plot(t |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x | plot (t, gain_position_y,'r') legend('X' |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on | title ('Kalman Velocity Gain') |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x | plot (t, gain_velocity_y,'r') legend('X' |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on | title ('Object position') |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on | ylabel ('Position/mm') plot(t |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x | plot (t, position_y,'r') legend('X' |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on | title ('Object||velocity||') |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on | ylabel ('Velocity/mm/s') plot(t |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on velocity_module hold on | title ('Object velocity direction') |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on velocity_module hold on | ylabel ('Direction/degrees') plot(t |
Variables | |
| Kalman performance estimation via residue and innovation error Read data clear | all |
| clc | E = dlmread('error_gain_pos_vel') |
| start = 50 | |
| innovation_x = E(start:start+time_lenght,1) | |
| innovation_y = E(start:start+time_lenght,2) | |
| cov_innovation_x = E(start:start+time_lenght,3) | |
| cov_innovation_y = E(start:start+time_lenght,4) | |
| residue_x = E(start:start+time_lenght,5) | |
| residue_y = E(start:start+time_lenght,6) | |
| cov_residue_x = E(start:start+time_lenght,7) | |
| cov_residue_y = E(start:start+time_lenght,8) | |
| position_x = E(start:start+time_lenght,9) | |
| position_y = E(start:start+time_lenght,10) | |
| velocity_module = E(start:start+time_lenght,11) | |
| velocity_angle = E(start:start+time_lenght,12) | |
| gain_position_x = E(start:start+time_lenght,13) | |
| gain_velocity_x = E(start:start+time_lenght,14) | |
| gain_position_y = E(start:start+time_lenght,15) | |
| gain_velocity_y = E(start:start+time_lenght,16) | |
| process_noise_x = E(start:start+time_lenght,17) | |
| process_noise_y = E(start:start+time_lenght,18) | |
| t = linspace(0,1,time_lenght+1) | |
| Plot Erro | figure = ginput(1) |
| std_residue_x = std(residue_x) | |
| mean_residue_y = mean(residue_y) | |
| std_residue_y = std(residue_y) | |
| xL = sprintf('X mean %g std %g',mean_residue_x,std_residue_x) | |
| yL = sprintf('Y mean %g std %g',mean_residue_y,std_residue_y) | |
| std_innovation_x = std(innovation_x) | |
| mean_innovation_y = mean(innovation_y) | |
| std_innovation_y = std(innovation_y) | |
Function Documentation
| Ix Iy CIx CIy Rx Ry CRx CRy x y norm | ( | v | ) |
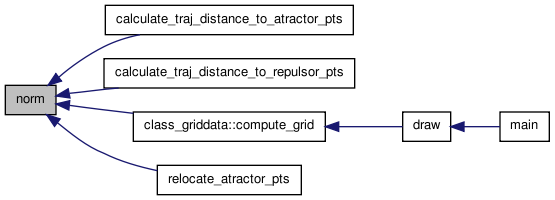
Referenced by calculate_traj_distance_to_atractor_pts(), calculate_traj_distance_to_repulsor_pts(), class_griddata::compute_grid(), and relocate_atractor_pts().
Here is the caller graph for this function:
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x plot | ( | t | , | |
| position_y | , | |||
| 'r' | ||||
| ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x plot | ( | t | , | |
| gain_velocity_y | , | |||
| 'r' | ||||
| ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x plot | ( | t | , | |
| gain_position_y | , | |||
| 'r' | ||||
| ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x plot | ( | t | , | |
| process_noise_y | , | |||
| 'r' | ||||
| ) |
| hold on cov_residue_x Y hold on cov_innovation_x plot | ( | t | , | |
| cov_innovation_y | , | |||
| 'r' | ||||
| ) |
| hold on cov_residue_x plot | ( | t | , | |
| cov_residue_y | , | |||
| 'r' | ||||
| ) |
| hold on innovation_x plot | ( | t | , | |
| innovation_y | , | |||
| 'r' | ||||
| ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on velocity_module hold on title | ( | 'Object velocity direction' | ) |
- Type Constraints
-
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on title | ( | 'Object||velocity||' | ) |
- Type Constraints
-
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on title | ( | 'Object position' | ) |
- Type Constraints
-
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on title | ( | 'Kalman Velocity Gain' | ) |
- Type Constraints
-
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on title | ( | 'Kalman Position Gain' | ) |
- Type Constraints
-
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on title | ( | 'Kalman process noise' | ) |
- Type Constraints
-
| hold on cov_residue_x Y hold on title | ( | 'Innovation error covariance(window size 15)' | ) |
- Type Constraints
-
| hold on xlabel | ( | 'Time(normalised)' | ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on velocity_module hold on ylabel | ( | 'Direction/degrees' | ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on position_x Y hold on ylabel | ( | 'Velocity/mm/s' | ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on gain_velocity_x Y Plot position and velocity hold on ylabel | ( | 'Position/mm' | ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on process_noise_x Y Plot gain position hold on gain_position_x Y hold on ylabel | ( | 'Gain' | ) |
| hold on cov_residue_x Y hold on cov_innovation_x Y Plot process noise hold on ylabel | ( | 'noise/mm' | ) |
| Plot Error Covariance hold on cov_residue_x Y hold on ylabel | ( | 'Covariance' | ) |
| hold on ylabel | ( | 'Error/mm' | ) |
Variable Documentation
| close all |
| cov_innovation_x = E(start:start+time_lenght,3) |
| cov_innovation_y = E(start:start+time_lenght,4) |
| cov_residue_x = E(start:start+time_lenght,7) |
| cov_residue_y = E(start:start+time_lenght,8) |
| E = dlmread('error_gain_pos_vel') |
| end end figure = ginput(1) |
| gain_position_x = E(start:start+time_lenght,13) |
| gain_position_y = E(start:start+time_lenght,15) |
| gain_velocity_x = E(start:start+time_lenght,14) |
| gain_velocity_y = E(start:start+time_lenght,16) |
| innovation_x = E(start:start+time_lenght,1) |
| innovation_y = E(start:start+time_lenght,2) |
| mean_innovation_y = mean(innovation_y) |
| mean_residue_y = mean(residue_y) |
| position_x = E(start:start+time_lenght,9) |
| position_y = E(start:start+time_lenght,10) |
| process_noise_x = E(start:start+time_lenght,17) |
| process_noise_y = E(start:start+time_lenght,18) |
| residue_x = E(start:start+time_lenght,5) |
| residue_y = E(start:start+time_lenght,6) |
| start = 50 |
Referenced by DEVICE_read_data().
| std_innovation_x = std(innovation_x) |
| std_innovation_y = std(innovation_y) |
| std_residue_x = std(residue_x) |
| std_residue_y = std(residue_y) |
| object t = linspace(0,1,time_lenght+1) |
Referenced by calculate_freespace_lanemarkers(), calculate_freespace_laserobstacles(), check_haar_feature_tic(), detect_and_draw(), detect_and_draw_foveated(), interpolate_panandtilt(), logger::logger(), main(), ptucontrol_status_handler(), logger::ReadFormatsFromFile(), class_base_ipm::ReportImagesInProperties(), and search_for_new_target().
| velocity_angle = E(start:start+time_lenght,12) |
| velocity_module = E(start:start+time_lenght,11) |
| xL = sprintf('X mean %g std %g',mean_residue_x,std_residue_x) |
| yL = sprintf('Y mean %g std %g',mean_residue_y,std_residue_y) |
