main.m File Reference
Functions | |
| Scans | y (i,:) |
| end | figure (1) |
| xlabel ('Theta/rad') | |
| ylabel ('R/mm') plot(Scans.t(previous_scan_index | |
| Scans | r (previous_scan_index,:) |
| Scans | figure (2) |
| plot (Scans.x(previous_scan_index,:), Scans.y(previous_scan_index,:),'.') axis([-4000 4000-4000 4000]) | |
| xlabel ('x/mm') | |
| ylabel ('y/mm') | |
| if | abs (d) > 100 imax |
| object | ph (1,:) |
| object | ph (2,:) |
| object | ph (3,:) |
Variables | |
| clear | all |
| clc Scans | r = dlmread('datafile') |
| Scans | t = repmat(deg2rad(linspace(-45,-45+270,1081)),size(Scans.r,1),1) |
| previous_scan_index = 190 | |
| for | i |
| hold | on |
| __pad0__ | |
| hold | off |
| index = (g.t+45)*4+1 | |
| break | |
| hold on object | x = Scans.x(previous_scan_index,imin:imax) |
| object | y = Scans.y(previous_scan_index,imin:imax) |
| object | dt = abs(Scans.t(previous_scan_index,imin)-Scans.t(previous_scan_index,imax)) |
| object | tm = (Scans.t(previous_scan_index,imin)+Scans.t(previous_scan_index,imax))/2 |
| object | rmin = min(object.r) |
| object | rmax = max(object.r) |
| object | dr = object.rmax-object.rmin |
| object hyp | tx = linspace(-80,80,10) |
| object hyp | ty = linspace(-80,80,10) |
| object hyp | rx = 0 |
| object hyp | ry = 0 |
| new_scan_index = previous_scan_index+1 | |
Function Documentation
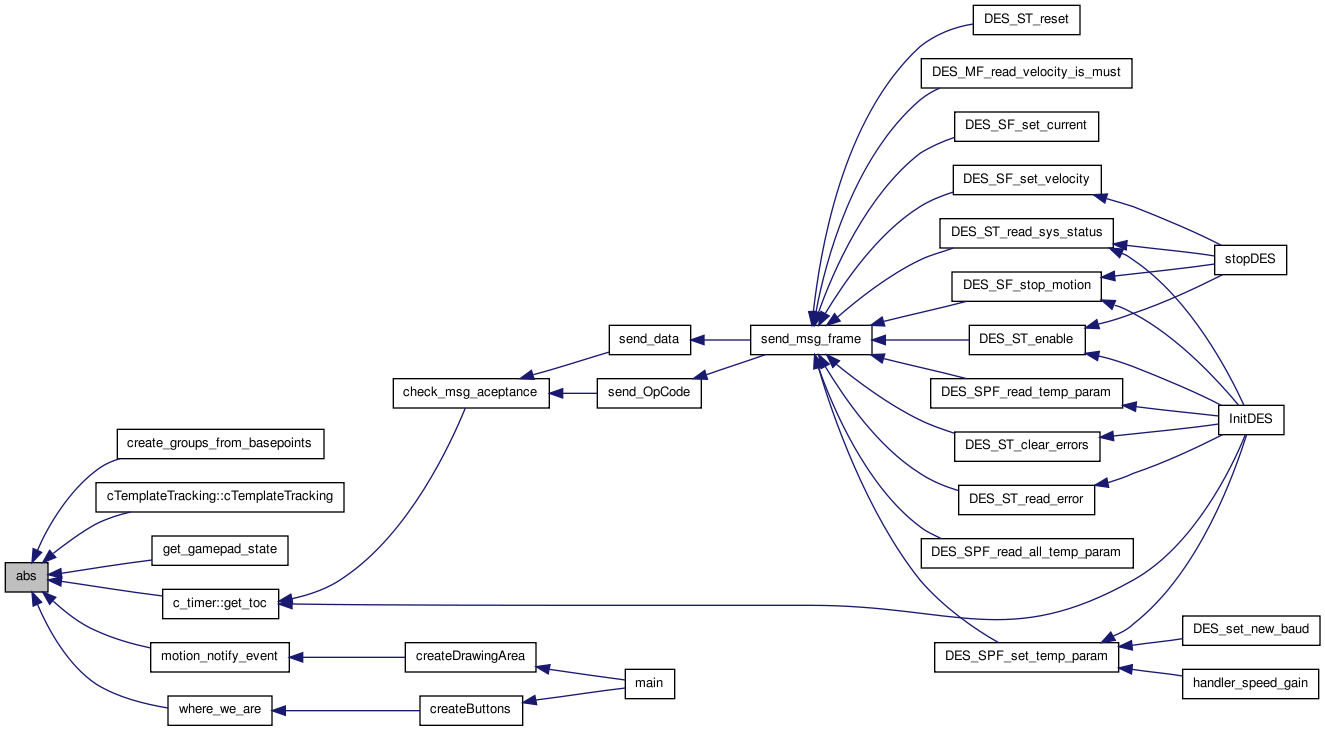
| if abs | ( | d | ) |
Referenced by create_groups_from_basepoints(), cTemplateTracking::cTemplateTracking(), get_gamepad_state(), c_timer::get_toc(), motion_notify_event(), and where_we_are().
Here is the caller graph for this function:
| Scans figure | ( | 2 | ) |
| end figure | ( | 1 | ) |
| object ph | ( | 3 | , | |
| : | ||||
| ) |
| object ph | ( | 2 | , | |
| : | ||||
| ) |
| object ph | ( | 1 | , | |
| : | ||||
| ) |
| plot | ( | Scans. | xprevious_scan_index,:, | |
| Scans. | yprevious_scan_index,:, | |||
| '.' | ||||
| ) |
| Scans r | ( | previous_scan_index | , | |
| : | ||||
| ) |
- Type Constraints
-
| xlabel | ( | 'x/mm' | ) |
| xlabel | ( | 'Theta/rad' | ) |
| Scans y | ( | i | , | |
| : | ||||
| ) |
| ylabel | ( | 'y/mm' | ) |
| ylabel | ( | 'R/mm' | ) |
Variable Documentation
| close all |
| object dr = object.rmax-object.rmin |
| object dt = abs(Scans.t(previous_scan_index,imin)-Scans.t(previous_scan_index,imax)) |
Referenced by compute_distance_traveled().
Referenced by main(), read_parameters(), and recursive_IEPF().
| hold off |
| previous_scan_index = 190 |
| object r = dlmread('datafile') |
| object rmax = max(object.r) |
| object rmin = min(object.r) |
| object hyp rx = 0 |
| object hyp ry = 0 |
| object t = repmat(deg2rad(linspace(-45,-45+270,1081)),size(Scans.r,1),1) |
| object hyp tx = linspace(-80,80,10) |
| object hyp ty = linspace(-80,80,10) |
| hold on object x = Scans.x(previous_scan_index,imin:imax) |
Referenced by create_hyp(), laser_pts(), main(), motion_notify_event(), myShowImage(), and class_advancedfloodfill::print_griddata().
| object y = Scans.y(previous_scan_index,imin:imax) |
Referenced by calculate_traj_distance_to_atractor_pts(), calculate_traj_distance_to_repulsor_pts(), create_hyp(), detect_haar_signal(), draw(), drawtrajectories(), generate_trajectories(), laser_handler(), laser_pts(), main(), motion_notify_event(), myShowImage(), class_advancedfloodfill::print_griddata(), and ScaleTemplate().
