Log recording module
[Logging]
This module recordes messages sent via IPC into data files. The module is compromised of two diferent programs, logger and log_recorder. The logger works in the v1.0 log format (1 header file ASCII, 1 data file binary), the log_recorder works in the v2.0 log format (1 header XML, various data files, binary). More...

|
Data Structures | |
| struct | TYPE_log |
| struct | logger_data_struct |
| class | logger |
Files | |
| file | logger.cpp |
Main logger file. | |
| file | logger.h |
Main logger header, global vars, typedefs, parameters. | |
| file | logger_functions.cpp |
Various logger functions. | |
| file | logger_functions.h |
Header containing logger prototypes. | |
| file | logger_types.h |
WORK IN PROGRESS. | |
| file | recorder.cpp |
Main recorder file. | |
| file | recorder.h |
Main header. | |
| file | recorder_common.h |
Recorder common includes and type defs. | |
Defines | |
| #define | LAR_LASER_NAME "lar_laser" |
| #define | perr(a) _perr(__FUNCTION__,__LINE__,(a)); |
| Custom error print function, this function prints a error message in the formagt: Error!! (__FUNCTION__,__LINE__) custom_message. | |
| #define | pwarn(a) _pwarn(__FUNCTION__,__LINE__,(a)); |
| Custom warning print function, this function prints a warning message in the formagt: Warning!! (__FUNCTION__,__LINE__) custom_message. | |
| #define | pdeb(a) _pdeb(__FUNCTION__,__LINE__,(a)); |
| Custom debug print function, this function prints a debug message in the formagt: Debug! (__FUNCTION__,__LINE__) custom_message. | |
| #define | p(a) _p(a); |
| Custom print function, this function prints a message in the formagt: MODULE_NAME (__FUNCTION__,__LINE__) custom_message. | |
| #define | null NULL |
| Same as NULL. | |
| #define | LOG_VERSION "v2.11" |
| Log_recorder version. | |
| #define | MESSAGE_TYPES_FILE "messages.xml" |
| File containing message types. | |
Functions | |
| int | main (int argc, char **argv) |
| void | initialize_format (void) |
| This functions initializes the format structure. | |
| void | shutdown_module (int sig) |
| makes a clean shutdown of the program | |
| void | robot_motion_command_handler (robot_motion_command_message *motion_command) |
| Handler for robot motion messages, when a message is recived it is saved to the log. | |
| void | robot_lights_command_handler (robot_lights_command_message *lights_command) |
| Handler for robot lights messages, when a message is recived it is saved to the log. | |
| void | laser3d_pointcloud_handler (TYPE_laser3d_pointcloud_message *laser3d_message) |
| Handler for laser3d point cloud messages, when a message is recived it is saved to the log. | |
| void | camera_n0_handler (camera_image_message *camera_n0) |
| Handler for camera n0 messages, when a message is recived it is saved to the log. | |
| void | camera_n1_handler (camera_image_message *camera_n1) |
| Handler for camera n1 messages, when a message is recived it is saved to the log. | |
| void | camera_n2_handler (camera_image_message *camera_n2) |
| Handler for camera n2 messages, when a message is recived it is saved to the log. | |
| void | camera_n3_handler (camera_image_message *camera_n3) |
| Handler for camera n3 messages, when a message is recived it is saved to the log. | |
| void | imu_handler (xsens_data_message *imu) |
| Handler for imu messages, when a message is recived it is saved to the log. | |
| void | xb3_handler (xb3_3dpointcloud_message *xb3) |
| Handler for xb3 messages, when a message is recived it is saved to the log. | |
| void | xb3_image_handler (xb3_stereoimage_message *xb3) |
| Handler for xb3 image messages, when a message is recived it is saved to the log. | |
| void | hokuyo_point_cloud_handler (hokuyo_pointcloud_message *hokuyo) |
| Handler for hokuyo_point_cloud messages, when a message is recived it is saved to the log. | |
| void | gpgga_handler (gps_gpgga_data_message *gpgga) |
| Handler for gpgga messages, when a message is recived it is saved to the log. | |
| void | gprmc_handler (gps_gprmc_data_message *gprmc) |
| Handler for gprmc messages, when a message is recived it is saved to the log. | |
| void | ipm_heartbeat_handler (void) |
| Handler for ipm messages, when a message is recived it is saved to the log. | |
| void | camera_n3_heartbeat_handler (void) |
| Handler for camera_n3 server messages, when a message is recived it is saved to the log. | |
| void | hokuyo_heartbeat_handler (void) |
| Handler for hokuyo server messages, when a message is recived it is saved to the log. | |
| void | print_log_status (TYPE_log *log_param) |
| This function indicates what messages will be logged. | |
| void | lar_unified_write_message (void *message, carmen_FILE *outfile, double timestamp, char *message_name, FORMATTER_PTR fmt) |
| This function saves a message to a file in a byte array format, this uses the old standard in which each byte is recorder in hexadecimal format. | |
| void | auxfile_unified_write_message (void *message, carmen_FILE *outfile, carmen_FILE *datafile, double timestamp, char *message_name, FORMATTER_PTR fmt) |
| This function saves a message to a file in a byte array format, this uses the new standard in which each message is recoded sequecialy in a separate file. | |
| void | lar_logwrite_write_header (carmen_FILE *outfile) |
| This function writes the start of the logger file. (New standard only). | |
| void | manager_shutdown_module (int x) |
| void | pusage (int argc, char **argv) |
| Prints module usage. | |
| void | MessageCatcher (MSG_INSTANCE msgInstance, BYTE_ARRAY callData, void *) |
| This function intercepts all messages recived by this module This function intercepts all messages recived by this module, fill the current message with data recived, adds this new message to the log header and writes the information to the respective log data file. | |
| void | _perr (const char *function_name, unsigned int line, const char *text) |
| void | _pwarn (const char *function_name, unsigned int line, const char *text) |
| void | _pdeb (const char *function_name, unsigned int line, const char *text) |
| void | _p (const char *text) |
| xmlChar * | ConvertInput (const char *in, const char *encoding) |
| void | update_xpath_nodes (xmlNodeSetPtr nodes, const xmlChar *value) |
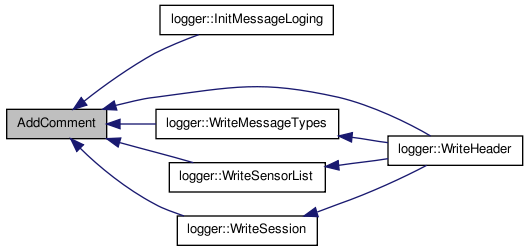
| void | AddComment (xmlNodePtr node, const char *text) |
| Add comment This function added a commengt to a XML doc tree. | |
| logger::logger () | |
| Constructor for the logger class. | |
| logger::~logger () | |
| Deconstructur for the logger class. | |
| int | logger::SetLogFiles (const char *filename) |
| This function sets the log file that will be used This function checks if the filename passed by already exists and if so, the filename will be append with _A, if that file also exist we test the next char, and so on. | |
| int | logger::ReadFormatsFromFile (void) |
| Read messages formats from a XML file. | |
| void | logger::InstallParameters (int argc, char **argv) |
| This function install all recorder parameters This function mallocs the number of parameters corresponding to the message types in the MESSAGE_TYPES_FILE and install them. This function also sets the param deamon to allow unfound variables. | |
| int | logger::StartLog (void) |
| This function start the log parser This function creates a new log parser and sets the begin of the XML log header. | |
| int | logger::WriteHeader (void) |
| Write log header This function writes the log header, the header constains, list of sessions, list of sensors and list of messages. | |
| int | logger::WriteSession (void) |
| Write session This function writes a log session onto a file. The log session contains the time and data of the log, the computer name, the session id, the start and end location, the driver of the car, car odometer information and weather conditions. | |
| int | logger::WriteSensorList (void) |
| Write sensor list This function writes a sensor list onto the log. | |
| int | logger::WriteSensor (unsigned int number) |
| Write a single sensor This function writes a single sensor into the log. Sensor are obtained using logger::GetSensors, sensor information contain: id, type, vendor, data interface, placement and if it a camera it also contains focal distance and resolution. | |
| int | logger::WriteMessageTypes (void) |
| Write a list of all message types This function writes a list of all message types to be logged. | |
| int | logger::InitMessageLoging (void) |
| Writes the begin of the messages element This function writes the begin of the messages element of the log. | |
| int | logger::AddMessage () |
| Addes a single message to the log header This function addes a new entry to the log header. Message format is m=message, t=message_type sp=start_position, l=length, c=comment. | |
| int | logger::GetSensors (void) |
| This function obtains the list of sensors This function obtains the list of sensors to be used in this log, for now this is just a dummy function. | |
| int | logger::UpdateStatistics (void) |
| Updade a posteriory statistics This function updates the log header with a posteriory statistics, it opens the file again parses it and updates the correct fields using Xpath. | |
| void | logger::SubscribeMessages () |
| Subscribe IPC Messages This function subscribes all the predefined message types. | |
| int | logger::CloseLog (void) |
| Close Log file This function cleans the XML parser and dumps memory, it also closes all data files. | |
Variables | |
| logger_data_struct | logger_data [] |
| TYPE_executionflags | flags |
| Include the interface. | |
| TYPE_log | log_param |
| carmen_FILE * | outfile |
| carmen_FILE * | datafile |
| double | logger_starttime |
| char | hokuyo_message_heartbeat |
| ipm_data_message * | ipm_data_msg |
| ipm_heartbeat_message | ipm_heartbeat |
| camera_image_message | camera_n3_server |
| carmen_laser_laser_message * | hokuyo_message |
| carmen_param_t | logger_params [] |
| logger | control |
| Main log class control. | |
| logger | control |
| Main log class control. | |
Detailed Description
This module recordes messages sent via IPC into data files. The module is compromised of two diferent programs, logger and log_recorder. The logger works in the v1.0 log format (1 header file ASCII, 1 data file binary), the log_recorder works in the v2.0 log format (1 header XML, various data files, binary).
- Version:
- 2.11
- Date:
- 18 May 2010
Define Documentation
| #define LAR_LASER_NAME "lar_laser" |
| #define LOG_VERSION "v2.11" |
Log_recorder version.
| #define MESSAGE_TYPES_FILE "messages.xml" |
File containing message types.
Referenced by logger::ReadFormatsFromFile().
| #define null NULL |
Same as NULL.
| #define p | ( | a | ) | _p(a); |
Custom print function, this function prints a message in the formagt: MODULE_NAME (__FUNCTION__,__LINE__) custom_message.
| #define pdeb | ( | a | ) | _pdeb(__FUNCTION__,__LINE__,(a)); |
Custom debug print function, this function prints a debug message in the formagt: Debug! (__FUNCTION__,__LINE__) custom_message.
| #define perr | ( | a | ) | _perr(__FUNCTION__,__LINE__,(a)); |
Custom error print function, this function prints a error message in the formagt: Error!! (__FUNCTION__,__LINE__) custom_message.
| #define pwarn | ( | a | ) | _pwarn(__FUNCTION__,__LINE__,(a)); |
Custom warning print function, this function prints a warning message in the formagt: Warning!! (__FUNCTION__,__LINE__) custom_message.
Function Documentation
| void _p | ( | const char * | text | ) |
| void _pdeb | ( | const char * | function_name, | |
| unsigned int | line, | |||
| const char * | text | |||
| ) |
| void _perr | ( | const char * | function_name, | |
| unsigned int | line, | |||
| const char * | text | |||
| ) |
| void _pwarn | ( | const char * | function_name, | |
| unsigned int | line, | |||
| const char * | text | |||
| ) |
| void AddComment | ( | xmlNodePtr | node, | |
| const char * | text | |||
| ) |
Add comment This function added a commengt to a XML doc tree.
- Parameters:
-
nodes the parent node text text to write in the comment
Referenced by logger::InitMessageLoging(), logger::WriteHeader(), logger::WriteMessageTypes(), logger::WriteSensorList(), and logger::WriteSession().
| int logger::AddMessage | ( | ) | [inherited] |
Addes a single message to the log header This function addes a new entry to the log header. Message format is m=message, t=message_type sp=start_position, l=length, c=comment.
- Returns:
- return error, 0 means no error,
Imput a new message
References logger::struct_message::comment, logger::current_message, logger::struct_file_handle::doc, logger::encoding, logger::file_handle, logger::struct_message::length, logger::message_types, logger::struct_file_handle::messages, logger::struct_file_handle::name, logger::node, perr, logger::rc, logger::save_on_add, logger::SEQUENCIAL, logger::struct_message::start_pos, logger::text, logger::struct_message::timestamp, logger::struct_message_types::total_messages, logger::struct_file_handle::total_messages, logger::struct_file_handle::total_messages_type, logger::total_number_messages, logger::TREE, logger::struct_message::type, logger::write_mode, and logger::struct_file_handle::writer.
| void auxfile_unified_write_message | ( | void * | message, | |
| carmen_FILE * | outfile, | |||
| carmen_FILE * | datafile, | |||
| double | timestamp, | |||
| char * | message_name, | |||
| FORMATTER_PTR | fmt | |||
| ) |
This function saves a message to a file in a byte array format, this uses the new standard in which each message is recoded sequecialy in a separate file.
- Parameters:
-
message message to be recorded outfile logger header file datafile logger data file timestamp time stamp to use message_name name of the message fmt format of the message, necessary to corvert to byte array
- Returns:
- void
| void camera_n0_handler | ( | camera_image_message * | camera_n0 | ) |
Handler for camera n0 messages, when a message is recived it is saved to the log.
- Parameters:
-
camera_n0 message recived
- Returns:
- void
| void camera_n1_handler | ( | camera_image_message * | camera_n1 | ) |
Handler for camera n1 messages, when a message is recived it is saved to the log.
- Parameters:
-
camera_n1 message recived
- Returns:
- void
| void camera_n2_handler | ( | camera_image_message * | camera_n2 | ) |
Handler for camera n2 messages, when a message is recived it is saved to the log.
- Parameters:
-
camera_n2 message recived
- Returns:
- void
| void camera_n3_handler | ( | camera_image_message * | camera_n3 | ) |
Handler for camera n3 messages, when a message is recived it is saved to the log.
- Parameters:
-
camera_n3 message recived
- Returns:
- void
| void camera_n3_heartbeat_handler | ( | void | ) |
Handler for camera_n3 server messages, when a message is recived it is saved to the log.
- Returns:
- void
| int logger::CloseLog | ( | void | ) | [inherited] |
Close Log file This function cleans the XML parser and dumps memory, it also closes all data files.
- Returns:
- return error, 0 means no error,
End Document
Free the writer
References logger::struct_file_handle::doc, logger::encoding, logger::file_handle, fp, i, logger::message_types, logger::struct_file_handle::name, perr, logger::rc, logger::SEQUENCIAL, logger::text, logger::total_message_types, logger::TREE, logger::write_mode, and logger::struct_file_handle::writer.
| xmlChar* ConvertInput | ( | const char * | in, | |
| const char * | encoding | |||
| ) |
| int logger::GetSensors | ( | void | ) | [inherited] |
This function obtains the list of sensors This function obtains the list of sensors to be used in this log, for now this is just a dummy function.
- Returns:
- return error, 0 means no error,
- Todo:
- Get sensors from a external XML list
References i, interface(), logger::number_sensors, and logger::sensors.

| void gpgga_handler | ( | gps_gpgga_data_message * | gpgga | ) |
Handler for gpgga messages, when a message is recived it is saved to the log.
- Parameters:
-
gpgga message recived
- Returns:
- void
| void gprmc_handler | ( | gps_gprmc_data_message * | gprmc | ) |
Handler for gprmc messages, when a message is recived it is saved to the log.
- Parameters:
-
gprmc message recived
- Returns:
- void
| void hokuyo_heartbeat_handler | ( | void | ) |
Handler for hokuyo server messages, when a message is recived it is saved to the log.
- Returns:
- void
| void hokuyo_point_cloud_handler | ( | hokuyo_pointcloud_message * | hokuyo | ) |
Handler for hokuyo_point_cloud messages, when a message is recived it is saved to the log.
- Parameters:
-
hokuyo_point_cloud message recived
- Returns:
- void
| void imu_handler | ( | xsens_data_message * | imu | ) |
Handler for imu messages, when a message is recived it is saved to the log.
- Parameters:
-
imu message recived
- Returns:
- void
| void initialize_format | ( | void | ) |
This functions initializes the format structure.
- Returns:
- void
| int logger::InitMessageLoging | ( | void | ) | [inherited] |
Writes the begin of the messages element This function writes the begin of the messages element of the log.
- Returns:
- return error, 0 means no error,
Start MESSAGES
Flush the buffer
Messages
References AddComment(), logger::file_handle, logger::struct_file_handle::messages, perr, logger::rc, logger::struct_file_handle::root, logger::SEQUENCIAL, logger::session_id, logger::text, logger::TREE, logger::write_mode, and logger::struct_file_handle::writer.

| void logger::InstallParameters | ( | int | argc, | |
| char ** | argv | |||
| ) | [inherited] |
This function install all recorder parameters This function mallocs the number of parameters corresponding to the message types in the MESSAGE_TYPES_FILE and install them. This function also sets the param deamon to allow unfound variables.
- Parameters:
-
argc Argument count argv Argument value
Allow unfound parametersg
Mallocs the paramets structure
Sets all parameters
Install the parameters
References i, logger::struct_message_types::log_message, logger::message_types, null, p, params, pwarn, logger::text, logger::total_message_types, and TRUE.
| void ipm_heartbeat_handler | ( | void | ) |
Handler for ipm messages, when a message is recived it is saved to the log.
- Returns:
- void
| void lar_logwrite_write_header | ( | carmen_FILE * | outfile | ) |
This function writes the start of the logger file. (New standard only).
- Parameters:
-
outfile logger header file
- Returns:
- void
| void lar_unified_write_message | ( | void * | message, | |
| carmen_FILE * | outfile, | |||
| double | timestamp, | |||
| char * | message_name, | |||
| FORMATTER_PTR | fmt | |||
| ) |
This function saves a message to a file in a byte array format, this uses the old standard in which each byte is recorder in hexadecimal format.
- Parameters:
-
message message to be recorded outfile logger file timestamp time stamp to use message_name name of the message fmt format of the message, necessary to corvert to byte array
- Returns:
- void
| void laser3d_pointcloud_handler | ( | TYPE_laser3d_pointcloud_message * | laser3d_message | ) |
Handler for laser3d point cloud messages, when a message is recived it is saved to the log.
- Parameters:
-
laser3d_message message recived
- Returns:
- void
| logger::logger | ( | ) | [inherited] |
Constructor for the logger class.
Set the log version variable
References logger::encoding, FALSE, logger::log_version, LOG_VERSION, logger::number_sensors, logger::save_on_add, logger::SEQUENCIAL, logger::session_id, t, logger::text, logger::total_number_messages, and logger::write_mode.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
pusage tests the number of arguments and exits on a bad value printing the use of the module.
We must first set the log to were the data will be saved, this is preformed using SetLogFiles
Read XML file containing the message types that will be logged
Install the parameters corresponing to the message formats
set the handler for signals. Will handle ctrl+c (SIGINT) with a clean exit
Then we get a list of sensors that are being used
The startlog function opens the log file in the XML format and writes the first part of the header (XML format and encoding)
Then we use writeheader to complete the rest of the header part of the log, list of sessions, list of sensors and list of message types
The function initmessageloging will write the first part of the messages log, just the opening of the messages element
Now that we are ready to recive data we subscribe all the messages
Get log start time
And main carmen_ipc_sleep cicle begins
| void manager_shutdown_module | ( | int | x | ) |
| void MessageCatcher | ( | MSG_INSTANCE | msgInstance, | |
| BYTE_ARRAY | callData, | |||
| void * | ||||
| ) |
This function intercepts all messages recived by this module This function intercepts all messages recived by this module, fill the current message with data recived, adds this new message to the log header and writes the information to the respective log data file.
- Parameters:
-
msgInstance Message instance passed by the IPC. callData Byte array containing a marsheld message. clientData Not used.
Referenced by logger::SubscribeMessages().

| void print_log_status | ( | TYPE_log * | log_param | ) |
This function indicates what messages will be logged.
- Parameters:
-
log_param log parameters strucutre
- Returns:
- void
| void pusage | ( | int | argc, | |
| char ** | argv | |||
| ) |
Prints module usage.
- Parameters:
-
argc argument count as recived by the program argv argument value as recived by the program Is the number of arguments is diferent from 2 we print a error message and usage.
| int logger::ReadFormatsFromFile | ( | void | ) | [inherited] |
Read messages formats from a XML file.
XPath context
XPath object
Get the message type file version
Get version
Remove the leter v form vX.XX and pass the number to message types file version
Get the message number
Get total number of messages types
Alloc message types
Get all names
Get all formats
Complete the rest of the fields
Cleanup of XPath data
dump the resulting document
free the document
References logger::struct_message_types::data_file, logger::struct_file_handle::doc, logger::encoding, FALSE, logger::file_handle, logger::struct_file_handle::folder, format, logger::struct_message_types::formatter, fp, logger::struct_message_types::fp, i, logger::struct_message_types::log_message, logger::log_version, logger::message_types, MESSAGE_TYPES_FILE, logger::mtf_version, logger::struct_file_handle::name, logger::struct_message_types::name, perr, pwarn, logger::struct_file_handle::short_name, t, logger::text, logger::total_message_types, logger::struct_message_types::total_messages, logger::struct_file_handle::xpathCtx, and logger::struct_file_handle::xpathObj.
| void robot_lights_command_handler | ( | robot_lights_command_message * | lights_command | ) |
Handler for robot lights messages, when a message is recived it is saved to the log.
- Parameters:
-
lights_command message recived
- Returns:
- void
| void robot_motion_command_handler | ( | robot_motion_command_message * | motion_command | ) |
Handler for robot motion messages, when a message is recived it is saved to the log.
- Parameters:
-
motion_command message recived
- Returns:
- void
| int logger::SetLogFiles | ( | const char * | name | ) | [inherited] |
This function sets the log file that will be used This function checks if the filename passed by already exists and if so, the filename will be append with _A, if that file also exist we test the next char, and so on.
- Parameters:
-
name name of the main log file
- Returns:
- - this function returns always 1 and crc field at msg structure
References logger::file_handle, logger::struct_file_handle::folder, fp, i, logger::struct_file_handle::name, p, logger::struct_file_handle::short_name, logger::struct_file_handle::stripedname, and logger::tmp.
| void shutdown_module | ( | int | sig | ) |
makes a clean shutdown of the program
makes a clean shutdown of the program.
Module shutdown function.
The main header file for egointerface module.
Safe shutdown.
Does a safe shutdown. Disconnects from IPC. Preform log closing operations and update log statistics.
Safe shutdown of module.
Make a clean exit.
Shuts down cm module with a clean exit.
Does a safe shutdown. Disconnects from IPC.
To do a safe ctrl +c exit.
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
The main header file for this module.
- Returns:
- nothing for now (should return an error code)
#ifndef _DES70_10_H_ #define _DES70_10_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/lar.h> //#include <lar/readcommandlineparameters.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### typedef struct{ int baudrate; int sys_config; int cur_reg_gain_p; int cur_reg_gain_i; int max_cur_output; int speed_reg_gain_p; int speed_reg_gain_i; int internal_param1; int internal_param2; int internal_param3; int max_speed_error; int setting_unit_gain; int setting_unit_offset; int setting_unit_delay; int peak_current; int max_cont_current; int therm_const; int max_speed; int acceleration; int speed_constant; int enc_resolution; int pole_pair_number; int internal_param4; int rpm2qc_factor; int index_offset; int pwm_period; int max_duty_cycle; int cur_det_ph_u_offset; int cur_det_ph_v_offset; int ad_conv_offset; int can_module_id; int can_service_id; int can_rx_pdo_id; int can_tx_pdo_id; int can_bcr1; int can_bcr2; int can_op_mode; int can_rx_sdo_id; int can_tx_sdo_id; int can_rtr0_id; int can_rtr1_id; int can_config; int internal_param5; int error_proc; int max_speed_curr; int hall_angle_offs; }TYPE_des_sysparam; enum ENUM_DES_SYS_PARAMS { BAUDRATE = 0, SYS_CONFIG = 1, CUR_REG_GAIN_P = 2, CUR_REG_GAIN_I = 3, MAX_CUR_OUTPUT = 4, SPEED_REG_GAIN_P = 5, SPEED_REG_GAIN_I = 6, INTERNAL_PARAM1 = 7, INTERNAL_PARAM2 = 8, INTERNAL_PARAM3 = 9, MAX_SPEED_ERROR = 10, SETTING_UNIT_GAIN = 11, SETTING_UNIT_OFFSET = 12, SETTING_UNIT_DELAY = 13, PEAK_CURRENT = 14, MAX_CONT_CURRENT = 15, THERM_CONST = 16, MAX_SPEED = 17, ACCELERATION = 18, SPEED_CONSTANT = 19, ENC_RESOLUTION = 20, POLE_PAIR_NUMBER = 21, INTERNAL_PARAM4 = 22, RPM_2QC_FACTOR = 23, INDEX_OFFSET = 24, PWM_PERIOD = 25, MAX_DUTY_CYCLE = 26, CUR_DET_PH_U_OFFSET = 27, CUR_DET_PH_V_OFFSET = 28, AD_CONV_OFFSET = 29, CAN_MODULE_ID = 30, CAN_SERVICE_ID = 31, CAN_RX_PDO_ID = 32, CAN_TX_PDO_ID = 33, CAN_BCR1 = 34, CAN_BCR2 = 35, CAN_OP_MODE = 36, CAN_RX_SDO_ID = 37, CAN_TX_SDO_ID = 38, CAN_RTR0_ID = 39, CAN_RTR1_ID = 40, CAN_CONFIG = 41, INTERNAL_PARAM5 = 42, ERROR_PROC = 43, MAX_SPEED_CURR = 44, HALL_ANGLE_OFFS = 45 }; typedef struct{ int sys_op_status; int actual_mean_cur_d; int actual_mean_cur_q; int cur_setting_val; int rel_rot_pos_rev; int speed_setting_val; int actual_mean_speed_val; int abs_rotor_pos; int standard_error; int can_error; int actual_cur_q; int actual_speed_val; int error_hist1; int error_hist2; int enc_counter; int enc_counter_last_ind; int hall_sens_pat; }TYPE_DES_status_var; enum ENUM_DES_STATUS_VAR { SYS_OP_STATUS = 128, ACTUAL_MEAN_CUR_D = 129, ACTUAL_MEAN_CUR_Q = 130, CUR_SETTING_VAL = 131, REL_ROT_POS_REV = 132, SPEED_SETTING_VAL = 133, ACTUAL_MEAN_SPEED_VAL = 134, ABS_ROTOR_POS = 135, STANDARD_ERROR = 136, CAN_ERROR = 137, ACTUAL_CUR_Q = 138, ACTUAL_SPEED_VAL = 139, ERROR_HIST1 = 140, ERROR_HIST2 = 141, ENC_COUNTER = 142, ENC_COUNTER_LAST_IND = 143, HALL_SENS_PAT = 144, }; typedef struct{ unsigned char OpCode; unsigned char data[520]; int size; int crc; }TYPE_msg_frame; //#################################################################### // Prototypes: for private functions can be declared ################# // in des70_10.c or preferably in des70_10_functions.c ## //#################################################################### //------- des70_10_init.cpp ------- int InitDES_communication(char* com_device, int* port, int baud, TYPE_executionflags* flg); //------- des70_10_functions.cpp ------- int calc_crc_16(TYPE_msg_frame* msg); int write_msg_inbuf(const int port, unsigned char* data, int size); int check_msg_aceptance(const int port, float wait_time, unsigned char* msg); int send_OpCode(const int port, unsigned char tries, unsigned char OpCode, char flg); int send_data(const int port, TYPE_msg_frame* msg, char flg); int read_buffer(const int port, TYPE_msg_frame* msg, char flg); int send_msg_frame(const int port, TYPE_msg_frame* msg, char flg); int DES_ST_read_sys_status(const int port, int* sys_status, char flg); int DES_ST_read_error(const int port, int* errors, char flg); int DES_ST_clear_errors(const int port, char flg); int DES_ST_reset(const int port, char flg); int DES_ST_enable(const int port, int* newState, char flg); int DES_SPF_read_temp_param(const int port, int paramNb, int dataFormat, int* response, char flg); int DES_SPF_set_temp_param(const int port, int paramNb, int dataFormat, int* newValue, char flg); int DES_SPF_read_all_temp_param(const int port, TYPE_des_sysparam* sysparam, char flg); int DES_SF_set_velocity(const int port, int newVelocity, char flg); int DES_SF_set_current(const int port, int newCurrent, char flg); int DES_SF_stop_motion(const int port, char flg); int DES_MF_read_velocity_is_must(const int port, int vel_type, int* velocity, int* requested_vel, char flg); int InitDES(const int port, TYPE_des_sysparam* newSysParam, char flg); int stopDES(const int port, char flg); int DES_set_new_baud(int* port, int baud, char flg); #ifdef _DES70_10_FUNCTIONS_C_ #else #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc x the type of signal sent: SIGINT etc
#ifndef _POWERMANAGER_H_ #define _POWERMANAGER_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/powermanager_interface.h> #define _SERIALPORT_ "/dev/ttyUSB0" //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in powermanager.c or preferably in powermanager_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_command_msg(void); void initialize_communications(void); int send_to_plc(unsigned char byte_value); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _POWERMANAGER_CPP_ /*or _POWERMANAGER_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### //mike confusion, uses a message structure to install parameters. message and parameters should not be different? TYPE_executionflags flags; //the command line parameters flags //creates a the default structure that will deal retrieve parameters. // explain fields (use a handler whenever a parameter changes) // var1 in this case is actually int PortHandle; powermanager_status_message status_msg; powermanager_command_message command_msg; #else extern TYPE_executionflags flags; extern powermanager_status_message status_msg; extern powermanager_command_message command_msg; extern int PortHandle; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
- Parameters:
-
x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
- Parameters:
-
x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
- Parameters:
-
x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
#ifndef _XBEE_H_ #define _XBEE_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/xbee_interface.h> #include <strings.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in xbee.c or preferably in xbee_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); void initialize_xbee(void); void xbee_transmit_data(void); void xbee_receive_data(void); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _XBEE_CPP_ /*or _XBEE_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### //mike confusion, uses a message structure to install parameters. message and parameters should not be different? char *COM_DEVICE_XBEE; //will receive com device address double read_frequency; //will receive com device access frequency TYPE_executionflags flags; //the command line parameters flags xbee_rx_data_message rx_message; //this is a message structure xbee_tx_data_message tx_message; //this is a message structure TYPE_xbee_public_params params; //this is a parameters structure int device_handler_xbee; char* tx_string; //creates a the default structure that will deal with retrieved parameters. // explain fields (use a handler whenever a parameter changes) // the values in the field xbee_data_param_shared_var, from lar.ini, will be installed in var1 // the var type is an integer: CARMEN_PARAM_INT carmen_param_t xbee_local_parameters[] = { {(char*)"xbee", (char*)"frequency", CARMEN_PARAM_DOUBLE, &read_frequency, 1, NULL}, {(char*)"xbee", (char*)"comport", CARMEN_PARAM_STRING, &COM_DEVICE_XBEE, 0, NULL}}; //prepare param struct #else extern char *COM_DEVICE_XBEE; //will receive com device address extern double read_frequency; //will receive com device access frequency extern TYPE_executionflags flags; extern xbee_rx_data_message rx_message; extern xbee_tx_data_message tx_message; extern TYPE_xbee_public_params params; extern int device_handler_xbee; extern char* tx_string; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
Disconnects from ipc and releases video writer
- Parameters:
-
x Signal value. To shutdown signal must be SIGINT
#ifndef _OT_H_ #define _OT_H_ #include <lar/lar.h> //#include "/home/atlas/lar/src/perception/planarobstacles/potkf_tese/potkf_interface.h" enum enum_state {SEARCHING,TRACKING,TARGET_LOST,INITIALISE}; typedef struct { enum_state state; unsigned int target_id; double current_angle,current_distance; double velocity_module,velocity_angle; double predicted_angle,predicted_distance; double size; int life_time; int occluded_time; int classification; }t_status; typedef struct { double start_angle; double end_angle; double start_range; double end_range; double min_size; double max_size; int min_life_time; int max_life_time; }t_search_area; int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); void potkf_handler(potkf_reduced_data_message*msg); bool search_for_new_target(potkf_reduced_data_message*potkf_msg,t_status*status,t_search_area*area); void init_search_area(t_search_area*area); bool get_new_target_information(potkf_reduced_data_message*potkf_msg,t_status*status); void foveationcontrol(t_status*status); void print_status(t_status*status); void foveationcontrol_home(void); #ifdef _OT_CPP_ bool potkf_heartbeat; TYPE_executionflags flags; //the command line parameters flags #else extern TYPE_executionflags flags; extern bool potkf_heartbeat; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _MODULETEMPLATE_H_ #define _MODULETEMPLATE_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/moduletemplate_interface.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in moduletemplate.c or preferably in moduletemplate_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(void); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _MODULETEMPLATE_CPP_ /*or _MODULETEMPLATE_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### //mike confusion, uses a message structure to install parameters. message and parameters should not be different? TYPE_executionflags flags; //the command line parameters flags moduletemplate_data_message msg; //this is a structure TYPE_moduletemplate_public_params params; //this is a structure //creates a the default structure that will deal with retrieved parameters. // explain fields (use a handler whenever a parameter changes) // the values in the field moduletemplate_data_param_shared_var, from lar.ini, will be installed in var1 // the var type is an integer: CARMEN_PARAM_INT carmen_param_t moduletemplate_local_parameters[] = { {(char*)"moduletemplate", (char*)"shared_var", CARMEN_PARAM_INT, &msg.var1, 1, _cast_to_carmen_param_change_handler_t_ handler_param_daemon} }; //prepare param struct #else extern TYPE_executionflags flags; extern moduletemplate_data_message msg; extern TYPE_moduletemplate_public_params params; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc x signal x the type of signal sent, SIGINT etcr signal signal recived
- Returns:
- void
- Parameters:
-
x the type of signal sent, SIGINT is the only one handled
#ifndef _AGENTS_H_ #define _AGENTS_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### // #include <lar/agents_interface.h> #include <lar/agents_interface.h> #include <lar/agent_tracker_interface.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### typedef struct{ int xbee_address; double sleeptime; double kp; } TYPE_agents_local_params; //#################################################################### // Prototypes: for private functions can be declared ################# // in agents.c or preferably in agents_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); void handler_distance_data(char *a, char *b, char *c); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _AGENTS_CPP_ /*or _AGENTS_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### TYPE_executionflags flags; //the command line parameters flags agents_data_message agents_message; //this is a structure xbee_tx_data_message xbee_tx_message; //this is a structure TYPE_agents_local_params local_params; //this is a structure for parameters intallation agent_clearance_distance_data_message distance_data_msg; double linear_speed, reference_distance, error; #else extern TYPE_executionflags flags; extern agents_data_message agents_message; //this is a structure extern xbee_tx_data_message xbee_tx_message; //this is a structure extern TYPE_agents_local_params local_params; extern agent_clearance_distance_data_message distance_data_msg; extern double linear_speed, reference_distance, error; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _AGENT_BEHAVIOUR_H_ #define _AGENT_BEHAVIOUR_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/agent_behaviour_interface.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in agent_behaviour.c or preferably in agent_behaviour_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _AGENT_BEHAVIOUR_CPP_ /*or _AGENT_BEHAVIOUR_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### //mike confusion, uses a message structure to install parameters. message and parameters should not be different? TYPE_executionflags flags; //the command line parameters flags agent_behaviour_data_message msg; //this is a message structure agent_behaviour_virtual_sensors_data_message virtual_sensors_data_msg; //this is a message structure TYPE_agent_behaviour_public_params params; //this is a parameters structure agents_data_message agents_message; //creates a the default structure that will deal retrieve parameters. // explain fields (use a handler whenever a parameter changes) // var1 in this case is actually carmen_param_t agent_behaviour_params[] = { {(char*)"agents", (char*)"data_param_shared_var", CARMEN_PARAM_INT, &msg.var1, 1, handler_param_daemon} }; //prepare param struct #else extern TYPE_executionflags flags; extern agent_behaviour_data_message msg; extern agent_behaviour_virtual_sensors_data_message virtual_sensors_data_msg; extern TYPE_agent_behaviour_public_params params; extern agents_data_message agents_message; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _AGENT_CLEARANCE_H_ #define _AGENT_CLEARANCE_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/agent_clearance_interface.h> #include "/usr/local/include/cvblobs/BlobResult.h" //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### typedef struct{ double sleeptime; } TYPE_agent_clearance_local_params; //#################################################################### // Prototypes: for private functions can be declared ################# // in agent_clearance.c or preferably in agent_clearance_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); void handler_rx_msg_received(void); void arena_image_handler(camera_image_message *msg_firei); void heartbeat_handler_n0(carmen_heartbeat_message *); void get_image(IplImage *image); void flood_fill_fixed_threshold(void); void init_images(void); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _AGENT_CLEARANCE_CPP_ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### TYPE_executionflags flags; //the command line parameters flags agent_clearance_distance_data_message distance_message; //this is a message structure TYPE_agent_clearance_local_params local_parameters; //this is a parameters structure xbee_rx_data_message rx_message; camera_image_message image_message; int image_message_alloc; char firei_n0_image_message_heartbeat; int msecstowait; int height, width; double ts; IplImage* img; IplImage* gray; IplImage* adapt_thresholded; IplImage* fill_temp; IplImage* filled; IplImage* filled_final; IplImage* tmp; IplImage* image; IplImage* border; IplImage* lanemarkers; IplImage* tophat_image; IplImage* work_image; IplImage* hsv; IplImage* hue; IplImage* saturation; IplImage* value; IplImage* hf; IplImage* sf; IplImage* vf; //creates a the default structure that will deal retrieved parameters. carmen_param_t agent_clearance_params[] = { {(char*)"agents", (char*)"sleeptime", CARMEN_PARAM_DOUBLE, &local_parameters.sleeptime, 1, NULL}}; //declared the install struct #else extern TYPE_executionflags flags; extern agent_clearance_distance_data_message distance_message; //this is a message structure extern TYPE_agent_clearance_local_params local_parameters; extern xbee_rx_data_message rx_message; extern int height, width; extern char firei_n0_image_message_heartbeat; extern IplImage* img; extern IplImage* gray; extern IplImage* adapt_thresholded; extern IplImage* fill_temp; extern IplImage* filled; extern IplImage* filled_final; extern IplImage* tmp; extern IplImage* image; extern IplImage* border; extern IplImage* lanemarkers; extern IplImage* tophat_image; extern IplImage* work_image; extern IplImage* hsv; extern IplImage* hue; extern IplImage* saturation; extern IplImage* value; extern IplImage* hf; extern IplImage* sf; extern IplImage* vf; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _AGENT_TRACKER_H_ #define _AGENT_TRACKER_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/agent_tracker_interface.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in agent_tracker.c or preferably in agent_tracker_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _AGENT_TRACKER_CPP_ /*or _AGENT_TRACKER_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### //mike confusion, uses a message structure to install parameters. message and parameters should not be different? TYPE_executionflags flags; //the command line parameters flags agent_tracker_data_message msg; //this is a message structure agent_tracker_virtual_sensors_data_message virtual_sensors_data_msg; //this is a message structure TYPE_agent_tracker_public_params params; //this is a parameters structure agents_data_message agents_message; //creates a the default structure that will deal retrieve parameters. // explain fields (use a handler whenever a parameter changes) // var1 in this case is actually carmen_param_t agent_tracker_params[] = { {(char*)"agents", (char*)"data_param_shared_var", CARMEN_PARAM_INT, &msg.var1, 1, handler_param_daemon} }; //prepare param struct #else extern TYPE_executionflags flags; extern agent_tracker_data_message msg; extern agent_tracker_virtual_sensors_data_message virtual_sensors_data_msg; extern TYPE_agent_tracker_public_params params; extern agents_data_message agents_message; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _PDHFFC_H_ #define _PDHFFC_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/pdhffc_interface.h> #include "pdhffc_pid.h" #include "pdhffc_templatetracking.h" //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in pdhffc.c or preferably in pdhffc_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void draw_cross(IplImage *dst, int x, int y, int r, int g, int b); void draw_double_arrow(int x0, int y0, int x1, int y1, IplImage *dst, CvScalar color, int thickness, int line_type, int shift); void draw_blind_zone(IplImage *dst, int target_x, int target_y, int bz_x, int bz_y, int r, int g, int b); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _PDHFFC_CPP_ /*or _PDHFFC_C_, depends on the file type*/ TYPE_executionflags flags; //the command line parameters flags pdhffc_information_message msg; carmen_ptucontrol_command_message ptucommand; cTemplateTracking *TT; camera_params_t cam0_params; camera_params_t cam1_params; #else extern TYPE_executionflags flags; extern pdhffc_information_message msg; extern carmen_ptucontrol_command_message ptucommand; extern cTemplateTracking *TT; extern camera_params_t cam0_params; extern camera_params_t cam1_params; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent, SIGINT etcr x signal recieved
- Returns:
- void
#ifndef _TLHFCS_H_ #define _TLHFCS_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/tlhfcs_interface.h> #include <lar/tlcstm_messages.h> #include <lar/soundplayer_interface.h> #include "tlhfcs_init.h" //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### typedef struct { char *filename; CvHaarClassifierCascade* classifier; }TYPE_ligths_cascade; typedef struct { IplImage* img; char name[2500]; }TYPE_image; typedef struct{ int red[3]; int green[3]; int darkgreen[3]; int blue[3]; int darkblue[3]; int yellow[3]; int darkyellow[3]; int cyan[3]; int darkcyan[3]; int orange[3]; int magenta[3]; int darkmagenta[3]; int black[3]; }TYPE_color; typedef struct { TYPE_image ligths; TYPE_image gui_ligths; TYPE_image gray; TYPE_image s_filter; TYPE_image v_filter; TYPE_image sand_v_filter; TYPE_image red_filter; TYPE_image green_filter; TYPE_image yellow_filter; TYPE_image detected_signs; CvSize img_size; CvSize sign_in_size; }TYPE_ligths_imgs; typedef struct { int maxH; int minH; int maxS; int minS; int maxV; int minV; }TYPE_hsv_limits; typedef struct { double max_color_ratio; double max_black_ratio; int sign_min_size; int sign_max_size; double color_obj; double bavg_obj; double err; double avg_around_color_min; double avg_around_color_max; }TYPE_decision_limits; #define MAX_OBJ 30 typedef struct { TYPE_image srcRGB; TYPE_image gui_debug; TYPE_image possible_sign[MAX_OBJ]; TYPE_image mask_p_sign[MAX_OBJ]; TYPE_image vf[MAX_OBJ]; CvRect roi[MAX_OBJ]; double color_r[MAX_OBJ]; double black_r[MAX_OBJ]; double res[MAX_OBJ]; double cratio_weigth; double bavg_weigth; int num_total; int selected; int previous_tot; TYPE_ligths_cascade cascade; TYPE_decision_limits decision_limits; int threshold_lim; }TYPE_sign_analysis; typedef struct { double cratio_weigth; double bavg_weigth; TYPE_ligths_imgs imgs; TYPE_hsv_limits red_limits, green_limits, yellow_limits; TYPE_sign_analysis rc_analysis, gau_analysis, yal_analysis, yar_analysis, park_analysis; char use_angle; char heigth_updated; }TYPE_ligths_analysis; typedef struct { double cofidence; int x; int y; int width; int height; char name[80]; int sign; int* color_rec; int* color_str; double* color_r; double* black_r; }TYPE_detected_sign; //#################################################################### // Prototypes: for private functions can be declared ################# // in tlhfcs.c or preferably in tlhfcs_functions.c ## //#################################################################### //int main(int argc, char **argv); void shutdown_module(int x); //void handler_param_daemon(char *a, char *b, char *c); void heartbeat_handler_n0(carmen_heartbeat_message *heartbeat_msg); void heartbeat_handler_n1(carmen_heartbeat_message *heartbeat_msg); void heartbeat_handler_n2(carmen_heartbeat_message *heartbeat_msg); void heartbeat_handler_n3(carmen_heartbeat_message *heartbeat_msg); void handler_load_rc_haar_cascade(void); void handler_load_gau_haar_cascade(void); void handler_load_yal_haar_cascade(void); void handler_load_yar_haar_cascade(void); void handler_load_park_haar_cascade(void); void handler_sign_in_height_update(void); void handler_sign_size_update(void); void handler_bavg_weight_update(void); void handler_color_weight_update(void); void detect_and_draw_objects( int, CvScalar); void draw_cross(IplImage *src,int line,int column,int lenght, int *color); void draw_gui_sign_data(TYPE_sign_analysis* SA, IplImage* src, int* lx, int* ly, int img_height, CvFont* tmp_font, int* color_line, int* color_text, char* sign_name, int search); void detect_haar_signal(CvHaarClassifierCascade* classifier, TYPE_image* srcRGB,TYPE_sign_analysis* sign_analysis, TYPE_executionflags* flgs, int* color); void color_segmentation(TYPE_hsv_limits* hsv_limits, const IplImage* srcRGB, IplImage* vf, double* ratio, double* b_avg,char debug, char* name); void refresh_windows(void); void init_color_table(TYPE_color* ); void find_tl_sign(TYPE_sign_analysis* sign_analysis, TYPE_hsv_limits*, int* color, TYPE_executionflags* flgs, char* name); void get_image_from_camera3(void); void init_color_values(void); void get_image_from_camera3(void); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _TLHFCS_CPP_ /*or _TLHFCS_C_, depends on the file type*/ TYPE_detected_sign detected_sign; TYPE_color color_table; TYPE_executionflags flags; //the command line parameters flags tlcstm_data_message tl_msg; //TYPE_tlhfcs_public_params params; TYPE_ligths_analysis LA; camera_image_message c0; int c0_alloc=1; camera_image_message c1; int c1_alloc=1; camera_image_message c2; int c2_alloc=1; camera_image_message c3; int c3_alloc=1; char firei_n0_msg_heart_beat = 0; char firei_n1_msg_heart_beat = 0; char firei_n2_msg_heart_beat = 0; char firei_n3_msg_heart_beat = 0; soundplayer_command_message sound_msg; tlcstm_command_message command; char cascade_filename[1024]; double ts; int cycle_freq; c_videosaving* videosaving; c_timer timer; CvFont Font; CvFont Font1; IplImage* image_cam3 = cvCreateImage(LA.imgs.img_size, IPL_DEPTH_8U , 3); char str0[20]; int centerx,centery; carmen_param_t module_refresh_params[] = { {(char*)"freq", (char*)"tlhfcs", CARMEN_PARAM_INT, &cycle_freq, 1, NULL}, }; carmen_param_t colordetection_params[] = { {(char*)"cd", (char*)"red_H_max", CARMEN_PARAM_INT, &LA.red_limits.maxH, 1, NULL}, {(char*)"cd", (char*)"red_H_min", CARMEN_PARAM_INT, &LA.red_limits.minH, 1, NULL}, {(char*)"cd", (char*)"red_S_max", CARMEN_PARAM_INT, &LA.red_limits.maxS, 1, NULL}, {(char*)"cd", (char*)"red_S_min", CARMEN_PARAM_INT, &LA.red_limits.minS, 1, NULL}, {(char*)"cd", (char*)"red_V_max", CARMEN_PARAM_INT, &LA.red_limits.maxV, 1, NULL}, {(char*)"cd", (char*)"red_V_min", CARMEN_PARAM_INT, &LA.red_limits.minV, 1, NULL}, {(char*)"cd", (char*)"green_H_max", CARMEN_PARAM_INT, &LA.green_limits.maxH, 1, NULL}, {(char*)"cd", (char*)"green_H_min", CARMEN_PARAM_INT, &LA.green_limits.minH, 1, NULL}, {(char*)"cd", (char*)"green_S_max", CARMEN_PARAM_INT, &LA.green_limits.maxS, 1, NULL}, {(char*)"cd", (char*)"green_S_min", CARMEN_PARAM_INT, &LA.green_limits.minS, 1, NULL}, {(char*)"cd", (char*)"green_V_max", CARMEN_PARAM_INT, &LA.green_limits.maxV, 1, NULL}, {(char*)"cd", (char*)"green_V_min", CARMEN_PARAM_INT, &LA.green_limits.minV, 1, NULL}, {(char*)"cd", (char*)"yellow_H_max", CARMEN_PARAM_INT, &LA.yellow_limits.maxH, 1, NULL}, {(char*)"cd", (char*)"yellow_H_min", CARMEN_PARAM_INT, &LA.yellow_limits.minH, 1, NULL}, {(char*)"cd", (char*)"yellow_S_max", CARMEN_PARAM_INT, &LA.yellow_limits.maxS, 1, NULL}, {(char*)"cd", (char*)"yellow_S_min", CARMEN_PARAM_INT, &LA.yellow_limits.minS, 1, NULL}, {(char*)"cd", (char*)"yellow_V_max", CARMEN_PARAM_INT, &LA.yellow_limits.maxV, 1, NULL}, {(char*)"cd", (char*)"yellow_V_min", CARMEN_PARAM_INT, &LA.yellow_limits.minV, 1, NULL}, }; //prepare param struct carmen_param_t tlhfcs_camera_params[] = { {(char*)"camera3", (char*)"imagewidth", CARMEN_PARAM_INT, &LA.imgs.img_size.width, 1, NULL}, {(char*)"camera3", (char*)"imageheight", CARMEN_PARAM_INT, &LA.imgs.img_size.height, 1, NULL}, };//prepare param struct from the image that camera3 will give carmen_param_t tlhfcs_params[] = { {(char*)"tlhfcs", (char*)"sign_in_height", CARMEN_PARAM_INT, &LA.imgs.sign_in_size.height, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_in_height_update}, {(char*)"tlhfcs", (char*)"sign_min_size", CARMEN_PARAM_INT, &LA.rc_analysis.decision_limits.sign_min_size, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_size_update}, {(char*)"tlhfcs", (char*)"sign_max_size", CARMEN_PARAM_INT, &LA.rc_analysis.decision_limits.sign_max_size, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_size_update}, {(char*)"tlhfcs", (char*)"thresh_limit", CARMEN_PARAM_INT, &LA.rc_analysis.threshold_lim, 1, NULL}, {(char*)"tlhfcs", (char*)"cratio_weigth", CARMEN_PARAM_DOUBLE, &LA.cratio_weigth, 1, _cast_to_carmen_param_change_handler_t_ handler_color_weight_update}, {(char*)"tlhfcs", (char*)"bavg_weigth", CARMEN_PARAM_DOUBLE, &LA.bavg_weigth, 1, _cast_to_carmen_param_change_handler_t_ handler_bavg_weight_update}, //----------------------------------- //params for Red Cross //----------------------------------- {(char*)"tlhfcs", (char*)"rc_cascade_path", CARMEN_PARAM_STRING, &LA.rc_analysis.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_rc_haar_cascade}, {(char*)"tlhfcs", (char*)"rc_max_cratio", CARMEN_PARAM_DOUBLE, &LA.rc_analysis.decision_limits.max_color_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"rc_max_bratio", CARMEN_PARAM_DOUBLE, &LA.rc_analysis.decision_limits.max_black_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"rc_color_obj", CARMEN_PARAM_DOUBLE, &LA.rc_analysis.decision_limits.color_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"rc_bavg_obj", CARMEN_PARAM_DOUBLE, &LA.rc_analysis.decision_limits.bavg_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"rc_err", CARMEN_PARAM_DOUBLE, &LA.rc_analysis.decision_limits.err, 1, NULL}, //----------------------------------- //params for Green Arrow Up //----------------------------------- {(char*)"tlhfcs", (char*)"gau_cascade_path", CARMEN_PARAM_STRING, &LA.gau_analysis.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_gau_haar_cascade}, {(char*)"tlhfcs", (char*)"gau_max_cratio", CARMEN_PARAM_DOUBLE, &LA.gau_analysis.decision_limits.max_color_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"gau_max_bratio", CARMEN_PARAM_DOUBLE, &LA.gau_analysis.decision_limits.max_black_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"gau_color_obj", CARMEN_PARAM_DOUBLE, &LA.gau_analysis.decision_limits.color_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"gau_bavg_obj", CARMEN_PARAM_DOUBLE, &LA.gau_analysis.decision_limits.bavg_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"gau_err", CARMEN_PARAM_DOUBLE, &LA.gau_analysis.decision_limits.err, 1, NULL}, //----------------------------------- //params for Yellow Arrow Left //----------------------------------- {(char*)"tlhfcs", (char*)"yal_cascade_path", CARMEN_PARAM_STRING, &LA.yal_analysis.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_yal_haar_cascade}, {(char*)"tlhfcs", (char*)"yal_max_cratio", CARMEN_PARAM_DOUBLE, &LA.yal_analysis.decision_limits.max_color_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"yal_max_bratio", CARMEN_PARAM_DOUBLE, &LA.yal_analysis.decision_limits.max_black_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"yal_color_obj", CARMEN_PARAM_DOUBLE, &LA.yal_analysis.decision_limits.color_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"yal_bavg_obj", CARMEN_PARAM_DOUBLE, &LA.yal_analysis.decision_limits.bavg_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"yal_err", CARMEN_PARAM_DOUBLE, &LA.yal_analysis.decision_limits.err, 1, NULL}, //----------------------------------- //params for Yellow Arrow Right //----------------------------------- {(char*)"tlhfcs", (char*)"yar_cascade_path", CARMEN_PARAM_STRING, &LA.yar_analysis.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_yar_haar_cascade}, {(char*)"tlhfcs", (char*)"yar_max_cratio", CARMEN_PARAM_DOUBLE, &LA.yar_analysis.decision_limits.max_color_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"yar_max_bratio", CARMEN_PARAM_DOUBLE, &LA.yar_analysis.decision_limits.max_black_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"yar_color_obj", CARMEN_PARAM_DOUBLE, &LA.yar_analysis.decision_limits.color_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"yar_bavg_obj", CARMEN_PARAM_DOUBLE, &LA.yar_analysis.decision_limits.bavg_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"yar_err", CARMEN_PARAM_DOUBLE, &LA.yar_analysis.decision_limits.err, 1, NULL}, //----------------------------------- //params for Park //----------------------------------- {(char*)"tlhfcs", (char*)"park_cascade_path", CARMEN_PARAM_STRING, &LA.park_analysis.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_park_haar_cascade}, {(char*)"tlhfcs", (char*)"park_max_cratio", CARMEN_PARAM_DOUBLE, &LA.park_analysis.decision_limits.max_color_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"park_max_bratio", CARMEN_PARAM_DOUBLE, &LA.park_analysis.decision_limits.max_black_ratio, 1, NULL}, {(char*)"tlhfcs", (char*)"park_color_obj", CARMEN_PARAM_DOUBLE, &LA.park_analysis.decision_limits.color_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"park_bavg_obj", CARMEN_PARAM_DOUBLE, &LA.park_analysis.decision_limits.bavg_obj, 1, NULL}, {(char*)"tlhfcs", (char*)"park_err", CARMEN_PARAM_DOUBLE, &LA.park_analysis.decision_limits.err, 1, NULL}, };//prepare param struct for this module #else extern TYPE_executionflags flags; extern tlcstm_data_message tl_msg; extern TYPE_ligths_analysis LA; extern CvFont Font; extern CvFont Font1; extern TYPE_color color_table; extern TYPE_detected_sign detected_sign; extern char cascade_filename[1024]; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent, SIGINT etcr
#ifndef _VSCSHFBA_H_ #define _VSCSHFBA_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/vscshfba_interface.h> #include <lar/tlcstm_messages.h> #include <lar/soundplayer_interface.h> #include <cvblobs/BlobResult.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### typedef struct { char *filename; CvHaarClassifierCascade* classifier; }TYPE_cascade; typedef struct { IplImage* img; char name[25]; }TYPE_image; typedef struct { IplImage* src; IplImage* gui; IplImage* hsv; IplImage* red_h; IplImage* red_s; IplImage* red_v; IplImage* red_h_bin; IplImage* red_h_bin2; IplImage* red_h_bin3; IplImage* red_s_bin; IplImage* red_v_bin; IplImage* red_mask; IplImage* white_h; IplImage* white_s; IplImage* white_v; IplImage* white_h_bin; IplImage* white_s_bin; IplImage* white_v_bin; IplImage* white_mask; IplImage* black_h; IplImage* black_s; IplImage* black_v; IplImage* black_h_bin; IplImage* black_s_bin; IplImage* black_v_bin; IplImage* black_mask; IplImage* blue_h; IplImage* blue_s; IplImage* blue_v; IplImage* blue_h_bin; IplImage* blue_s_bin; IplImage* blue_v_bin; IplImage* blue_mask; IplImage* tmp_h; IplImage* tmp_s; IplImage* tmp_v; CvSize imgs_size; CvSize look_sign_in_size; CvSize gui_size; int heigth_updated; int use_shm; }TYPE_imgs; typedef struct{ int red[3]; int green[3]; int darkgreen[3]; int blue[3]; int darkblue[3]; int yellow[3]; int darkyellow[3]; int cyan[3]; int darkcyan[3]; int orange[3]; int magenta[3]; int darkmagenta[3]; int black[3]; }TYPE_color; typedef struct { int num_hits; double tic; double main_color_ratio; double num_internal_spots; double confidence; double moments_ratio; int accepted; CvPoint center; CvRect region; IplImage* mask0; IplImage* mask1; IplImage* mask2; IplImage* tmp; }TYPE_sign_data; typedef struct { CvSeq* sign_seq; CvMemStorage* memstorage; CvSize tol_area; TYPE_cascade cascade; TYPE_sign_data selected_sign; int min_sign_size; int max_sign_size; int enclosing_size; int num_consecutive_hits; int aceptance_box; double color_obj; double color_err; double color_max; double moment_obj; double moment_err; double moment_max; double overall_confidence; char str[10][50]; char name[10]; }TYPE_sign_analysis; typedef struct { double num_hits; double color; double moment; }TYPE_weights; //#################################################################### // Prototypes: for private functions can be declared ################# // in vscshfba.c or preferably in vscshfba_functions.c ## //#################################################################### //void handler_load_M1_haar_cascade(void); void handler_load_W_N_cascade(void); void handler_load_W_D_cascade(void); void handler_load_M_B_cascade(void); void handler_load_M_L_cascade(void); void handler_load_I_60_cascade(void); void handler_load_I_H_cascade(void); void handler_sign_size(void); void shutdown_module(int x); void heartbeat_handler_n3(carmen_heartbeat_message *heartbeat_msg); void handler_sign_in_height_update(void); void init_color_table(TYPE_color* p); //file vscshfba_functions.cpp void detect_haar_signal(TYPE_sign_analysis* sign_analysis, IplImage* src, IplImage* dst, TYPE_executionflags* flgs, int* color_cross, int* color_box); void set_imageROIs(TYPE_imgs* imgs, CvRect* roi, char flg_set_roi); void check_mask_size(TYPE_sign_data* sign, CvSize* size); void draw_cross(IplImage *src,int line,int column,int lenght, int *color); void reset_imageROIs(TYPE_imgs* imgs); void check_haar_feature_tic(TYPE_sign_analysis* sign_analysis, double* num_cycles); void draw_gui_sign_data(IplImage* src, int* lx, int* ly, int img_height, CvFont* tmp_font, int* color_line, int* color_text, TYPE_sign_analysis* sign, int x_space); void set_cam_params(int x); void confirm_sign_tipology(TYPE_sign_analysis* sign_analysis, TYPE_imgs* imgs, TYPE_color_lim* color_lim, TYPE_weights* weights, TYPE_executionflags* flgs, int flg_ROIS); void show_masks(TYPE_sign_analysis* sign_analysis, TYPE_executionflags* flgs, int* start_x_pos, int* start_y_pos, int step); //functions prototype implemented in main file vscshfba.cpp int get_image_from_camera3(IplImage* dst, int* update_size, int* heart_beat, CvSize* cap_img_size); void set_cam_params(int x); #define AVG(a, b) (((a)+(b))/2) //#define MAX(a, b) ((a>b)? (a) : (b)) //#define MIN(a, b) ((a>b)? (b) : (a)) #define SET_RED_ROI 0b00000001 #define SET_WHITE_ROI 0b00000010 #define SET_BLACK_ROI 0b00000100 #define SET_BLUE_ROI 0b00001000 #define NUM_OF_CYCLES 10 //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _VSCSHFBA_CPP_ /*or _VSCSHFBA_C_, depends on the file type*/ //TYPE_detected_sign detected_sign; TYPE_cascade cascade; TYPE_color color_table; TYPE_acl_color_limits color_limits; TYPE_sign_analysis W_DA, W_NA; TYPE_sign_analysis I_60A, I_HA; TYPE_sign_analysis M_BA, M_LA; TYPE_sign_data* sign_check; TYPE_sign_data* accepted_sign; char sign_name_detected[50]; char searching[50]; CvMoments cent_moments; CBlobResult *blobs; double res; char cascade_filename[1024]; double cycle_freq; c_timer timer; CvFont Font; CvFont Font1; CvFont Font2; TYPE_imgs imgs; int updated_size; TYPE_weights weight; int firei_n3_msg_heart_beat = 0; double ts; camera_image_message c3; int c3_alloc=1; IplImage* image_cam3 = cvCreateImage(cvSize(320,240), IPL_DEPTH_8U , 3); soundplayer_command_message sound_msg; vscshfba_command_message command; vscshfba_data_message vscshfba_msg; TYPE_executionflags flags; //the command line parameters flags c_videosaving* videosaving; //write int gui image all info required int lx=0; int ly = 0; int step = 0; int wind_pos_x = 0; int wind_pos_y = 0; //char str0[40], str1[40]; IplConvKernel* morph_element; carmen_param_t module_refresh_params[] = { {(char*)"freq", (char*)"vscshfba", CARMEN_PARAM_DOUBLE, &cycle_freq, 1, NULL}, }; carmen_param_t acl_colordetection_params[] = { {(char*)"acl", (char*)"red_H_max", CARMEN_PARAM_DOUBLE, &color_limits.red.maxH, 1, NULL}, {(char*)"acl", (char*)"red_H_min", CARMEN_PARAM_DOUBLE, &color_limits.red.minH, 1, NULL}, {(char*)"acl", (char*)"red_S_max", CARMEN_PARAM_DOUBLE, &color_limits.red.maxS, 1, NULL}, {(char*)"acl", (char*)"red_S_min", CARMEN_PARAM_DOUBLE, &color_limits.red.minS, 1, NULL}, {(char*)"acl", (char*)"red_V_max", CARMEN_PARAM_DOUBLE, &color_limits.red.maxV, 1, NULL}, {(char*)"acl", (char*)"red_V_min", CARMEN_PARAM_DOUBLE, &color_limits.red.minV, 1, NULL}, {(char*)"acl", (char*)"white_H_max", CARMEN_PARAM_DOUBLE, &color_limits.white.maxH, 1, NULL}, {(char*)"acl", (char*)"white_H_min", CARMEN_PARAM_DOUBLE, &color_limits.white.minH, 1, NULL}, {(char*)"acl", (char*)"white_S_max", CARMEN_PARAM_DOUBLE, &color_limits.white.maxS, 1, NULL}, {(char*)"acl", (char*)"white_S_min", CARMEN_PARAM_DOUBLE, &color_limits.white.minS, 1, NULL}, {(char*)"acl", (char*)"white_V_max", CARMEN_PARAM_DOUBLE, &color_limits.white.maxV, 1, NULL}, {(char*)"acl", (char*)"white_V_min", CARMEN_PARAM_DOUBLE, &color_limits.white.minV, 1, NULL}, {(char*)"acl", (char*)"black_H_max", CARMEN_PARAM_DOUBLE, &color_limits.black.maxH, 1, NULL}, {(char*)"acl", (char*)"black_H_min", CARMEN_PARAM_DOUBLE, &color_limits.black.minH, 1, NULL}, {(char*)"acl", (char*)"black_S_max", CARMEN_PARAM_DOUBLE, &color_limits.black.maxS, 1, NULL}, {(char*)"acl", (char*)"black_S_min", CARMEN_PARAM_DOUBLE, &color_limits.black.minS, 1, NULL}, {(char*)"acl", (char*)"black_V_max", CARMEN_PARAM_DOUBLE, &color_limits.black.maxV, 1, NULL}, {(char*)"acl", (char*)"black_V_min", CARMEN_PARAM_DOUBLE, &color_limits.black.minV, 1, NULL}, {(char*)"acl", (char*)"blue_H_max", CARMEN_PARAM_DOUBLE, &color_limits.blue.maxH, 1, NULL}, {(char*)"acl", (char*)"blue_H_min", CARMEN_PARAM_DOUBLE, &color_limits.blue.minH, 1, NULL}, {(char*)"acl", (char*)"blue_S_max", CARMEN_PARAM_DOUBLE, &color_limits.blue.maxS, 1, NULL}, {(char*)"acl", (char*)"blue_S_min", CARMEN_PARAM_DOUBLE, &color_limits.blue.minS, 1, NULL}, {(char*)"acl", (char*)"blue_V_max", CARMEN_PARAM_DOUBLE, &color_limits.blue.maxV, 1, NULL}, {(char*)"acl", (char*)"blue_V_min", CARMEN_PARAM_DOUBLE, &color_limits.blue.minV, 1, NULL}, }; carmen_param_t vscshfba_camera_params[] = { {(char*)"camera1", (char*)"imagewidth", CARMEN_PARAM_INT, &imgs.imgs_size.width, 1, NULL}, {(char*)"camera1", (char*)"imageheight", CARMEN_PARAM_INT, &imgs.imgs_size.height, 1, NULL}, }; carmen_param_t vscshfba_params[] = { {(char*)"vscshfba", (char*)"sign_in_height", CARMEN_PARAM_INT, &updated_size, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_in_height_update}, {(char*)"vscshfba", (char*)"weight_color", CARMEN_PARAM_DOUBLE, &weight.color, 1, NULL}, {(char*)"vscshfba", (char*)"weight_moment", CARMEN_PARAM_DOUBLE, &weight.moment, 1, NULL}, {(char*)"vscshfba", (char*)"weight_num_hits", CARMEN_PARAM_DOUBLE, &weight.num_hits, 1, NULL}, //data for information recommended speed 60 {(char*)"vscshfba", (char*)"info_60_color_obj", CARMEN_PARAM_DOUBLE, &I_60A.color_obj, 1, NULL}, {(char*)"vscshfba", (char*)"info_60_color_max", CARMEN_PARAM_DOUBLE, &I_60A.color_max, 1, NULL}, {(char*)"vscshfba", (char*)"info_60_moment_obj", CARMEN_PARAM_DOUBLE, &I_60A.moment_obj, 1, NULL}, {(char*)"vscshfba", (char*)"info_60_moment_max", CARMEN_PARAM_DOUBLE, &I_60A.moment_max, 1, NULL}, {(char*)"vscshfba", (char*)"info_60_aceptance", CARMEN_PARAM_DOUBLE, &I_60A.overall_confidence, 1, NULL}, {(char*)"vscshfba", (char*)"info_60_cascade", CARMEN_PARAM_STRING, &I_60A.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_I_60_cascade}, //data for information hospital near {(char*)"vscshfba", (char*)"info_H_color_obj", CARMEN_PARAM_DOUBLE, &I_HA.color_obj, 1, NULL}, {(char*)"vscshfba", (char*)"info_H_color_max", CARMEN_PARAM_DOUBLE, &I_HA.color_max, 1, NULL}, {(char*)"vscshfba", (char*)"info_H_moment_obj", CARMEN_PARAM_DOUBLE, &I_HA.moment_obj, 1, NULL}, {(char*)"vscshfba", (char*)"info_H_moment_max", CARMEN_PARAM_DOUBLE, &I_HA.moment_max, 1, NULL}, {(char*)"vscshfba", (char*)"info_H_aceptance", CARMEN_PARAM_DOUBLE, &I_HA.overall_confidence, 1, NULL}, {(char*)"vscshfba", (char*)"info_H_cascade", CARMEN_PARAM_STRING, &I_HA.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_I_H_cascade}, {(char*)"vscshfba", (char*)"mand_bus_color_obj", CARMEN_PARAM_DOUBLE, &M_BA.color_obj, 1, NULL}, {(char*)"vscshfba", (char*)"mand_bus_color_max", CARMEN_PARAM_DOUBLE, &M_BA.color_max, 1, NULL}, {(char*)"vscshfba", (char*)"mand_bus_moment_obj", CARMEN_PARAM_DOUBLE, &M_BA.moment_obj, 1, NULL}, {(char*)"vscshfba", (char*)"mand_bus_moment_max", CARMEN_PARAM_DOUBLE, &M_BA.moment_max, 1, NULL}, {(char*)"vscshfba", (char*)"mand_bus_aceptance", CARMEN_PARAM_DOUBLE, &M_BA.overall_confidence, 1, NULL}, {(char*)"vscshfba", (char*)"mand_bus_cascade", CARMEN_PARAM_STRING, &M_BA.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_M_B_cascade}, {(char*)"vscshfba", (char*)"mand_lights_color_obj", CARMEN_PARAM_DOUBLE, &M_LA.color_obj, 1, NULL}, {(char*)"vscshfba", (char*)"mand_lights_color_max", CARMEN_PARAM_DOUBLE, &M_LA.color_max, 1, NULL}, {(char*)"vscshfba", (char*)"mand_lights_moment_obj", CARMEN_PARAM_DOUBLE, &M_LA.moment_obj, 1, NULL}, {(char*)"vscshfba", (char*)"mand_lights_moment_max", CARMEN_PARAM_DOUBLE, &M_LA.moment_max, 1, NULL}, {(char*)"vscshfba", (char*)"mand_lights_aceptance", CARMEN_PARAM_DOUBLE, &M_LA.overall_confidence, 1, NULL}, {(char*)"vscshfba", (char*)"mand_lights_cascade", CARMEN_PARAM_STRING, &M_LA.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_M_L_cascade}, {(char*)"vscshfba", (char*)"warn_dip_color_obj", CARMEN_PARAM_DOUBLE, &W_DA.color_obj, 1, NULL}, {(char*)"vscshfba", (char*)"warn_dip_color_max", CARMEN_PARAM_DOUBLE, &W_DA.color_max, 1, NULL}, {(char*)"vscshfba", (char*)"warn_dip_moment_obj", CARMEN_PARAM_DOUBLE, &W_DA.moment_obj, 1, NULL}, {(char*)"vscshfba", (char*)"warn_dip_moment_max", CARMEN_PARAM_DOUBLE, &W_DA.moment_max, 1, NULL}, {(char*)"vscshfba", (char*)"warn_dip_aceptance", CARMEN_PARAM_DOUBLE, &W_DA.overall_confidence, 1, NULL}, {(char*)"vscshfba", (char*)"warn_dip_cascade", CARMEN_PARAM_STRING, &W_DA.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_W_D_cascade}, {(char*)"vscshfba", (char*)"warn_narrow_color_obj", CARMEN_PARAM_DOUBLE, &W_NA.color_obj, 1, NULL}, {(char*)"vscshfba", (char*)"warn_narrow_color_max", CARMEN_PARAM_DOUBLE, &W_NA.color_max, 1, NULL}, {(char*)"vscshfba", (char*)"warn_narrow_moment_obj", CARMEN_PARAM_DOUBLE, &W_NA.moment_obj, 1, NULL}, {(char*)"vscshfba", (char*)"warn_narrow_moment_max", CARMEN_PARAM_DOUBLE, &W_NA.moment_max, 1, NULL}, {(char*)"vscshfba", (char*)"warn_narrow_aceptance", CARMEN_PARAM_DOUBLE, &W_NA.overall_confidence, 1, NULL}, {(char*)"vscshfba", (char*)"warn_narrow_cascade", CARMEN_PARAM_STRING, &W_NA.cascade.filename, 1, _cast_to_carmen_param_change_handler_t_ handler_load_W_N_cascade}, {(char*)"vscshfba", (char*)"sign_min_size", CARMEN_PARAM_INT, &W_NA.min_sign_size, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_size}, {(char*)"vscshfba", (char*)"sign_max_size", CARMEN_PARAM_INT, &W_NA.max_sign_size, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_size}, {(char*)"vscshfba", (char*)"enclosing_size", CARMEN_PARAM_INT, &W_NA.enclosing_size, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_size}, {(char*)"vscshfba", (char*)"aceptance_box", CARMEN_PARAM_INT, &W_NA.aceptance_box, 1, _cast_to_carmen_param_change_handler_t_ handler_sign_size}, }; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent, SIGINT etcr x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
- Parameters:
-
x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
- Parameters:
-
in,: x the type of intercepted signal, SIGINT
#ifndef _EGOMOTIONGPSIMU_H_ #define _EGOMOTIONGPSIMU_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/egomotiongpsimu_interface.h> #include<amlpp/amlpp.h> #include <gtk/gtk.h> using namespace amlpp; //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### // Class used to create the nonlinear observer objects class Observer { // the observer gains RealMatrix k11; RealMatrix k12; RealMatrix k21; RealMatrix k22; RealMatrix k31; RealMatrix k32; RealMatrix Gain; RealMatrix GainWGPS; RealMatrix GainWOGPS; // the observer states RealMatrix State; RealMatrix StateDot; RealMatrix Residual; // validity of the GPS measurement bool GPSisValid; //Transformation matrices RealMatrix R33_b2n; RealMatrix R33_n2b; RealMatrix T33_b2n; public: Observer(); ~Observer(){}; RealMatrix NlinObsStateUpdateV1(RealMatrix Measurements, Real Tb, Real deltaT); void NlinObsSetGain(); // set the Observer Gain void NlinObsChooseGainOnGPSValidity(bool GPSisValid); // Choose among applicable gains with and without GPS void NlinObsSetK(const char *ktype, double kval); // Set the individual Gain Matrices. void CalcRotationMatrix(double psi, double theta, double phi); // calculate the rotation matrix based on the Euler angles (Cardan Sequence) void NlinObsSetInitalCondition(RealMatrix Measurements); }; //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _EGOMOTIONGPSIMU_CPP_ //#################################################################### // Prototypes: for private functions can be declared ################# // in egomotiongpsimu.c or preferably in egomotiongpsimu_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void shutdown_module_noIPC(int x); void handler_param_daemon(char *a, char *b, char *c); void drawGPSpoints(IplImage*img, int x, int y); void drawEstimatedpoints(IplImage*img, int x, int y); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### TYPE_executionflags flags; //the command line parameters flags egomotiongpsimu_data_message msg; //this is a structure TYPE_egomotiongpsimu_public_params params; //this is a structure bool gprmc_update = FALSE; bool gpgga_update = FALSE; bool xsense_update = FALSE; bool GPSisValid = FALSE; //creates a the default structure that will deal with retrieved parameters. // explain fields (use a handler whenever a parameter changes) // the values in the field egomotiongpsimu_data_param_shared_var, from lar.ini, will be installed in var1 // the var type is an integer: CARMEN_PARAM_INT // carmen_param_t egomotiongpsimu_local_parameters[] = { // {(char*)"egomotiongpsimu", (char*)"shared_var", CARMEN_PARAM_INT, &msg.var1, 1, handler_param_daemon} // }; //prepare param struct #else extern TYPE_executionflags flags; extern egomotiongpsimu_data_message msg; extern TYPE_egomotiongpsimu_public_params params; extern void shutdown_module(int x); #ifdef _EGOMOTIONGPSIMU_FUNCTIONS_CPP_ Real g_arr[] = {0,0,-9.81}; // acceleration of gravity on a (North West Up) NWU reference frame RealMatrix g(g_arr,3,1); // put the array into a matrix for further calculations // #else // extern components egointerface; // extern void next_handler( GtkWidget *widget, gpointer data ); // extern void previous_handler( GtkWidget *widget,gpointer data ); // extern gboolean delete_event( GtkWidget *widget,GdkEvent *event,gpointer data ); // extern void destroy( GtkWidget *widget,gpointer data ); // extern void createWindow(); // extern void createButtons(); // extern void layoutWidgets(); // extern void show(); // extern void draw_brush (GtkWidget *widget, gdouble x, gdouble y); // extern gboolean expose_event( GtkWidget *widget, GdkEventExpose *event ); // extern gboolean configure_event( GtkWidget *widget, GdkEventConfigure *event ); // extern gboolean button_press_event( GtkWidget *widget, GdkEventButton *event ); // extern gboolean motion_notify_event( GtkWidget *widget, GdkEventMotion *event ); // extern void createDrawingArea(); #endif #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _LASERPROJECTIONONIMAGE_H_ #define _LASERPROJECTIONONIMAGE_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/laserprojectiononimage_interface.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in laserprojectiononimage.c or preferably in laserprojectiononimage_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); void project_pointcloud_to_image(xb3_3dpointcloud_message *pointcloud, int cam_number, double pan, double tilt, IplImage *dst, unsigned char r=255, unsigned char g=0,unsigned char b=0); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _LASERPROJECTIONONIMAGE_CPP_ /*or _LASERPROJECTIONONIMAGE_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### //mike confusion, uses a message structure to install parameters. message and parameters should not be different? TYPE_executionflags flags; //the command line parameters flags camera_image_message msg_flea2; IplImage* image; camera_image_message msg_flea2_c1; IplImage* image_c1; xb3_3dpointcloud_message pointcloud_msg_hokuyo; xb3_3dpointcloud_message pointcloud_msg_3dlaser; carmen_ptucontrol_status_message ptu_status; #else extern TYPE_executionflags flags; extern camera_image_message msg_flea2; extern IplImage* image; extern camera_image_message msg_flea2_c1; extern IplImage* image_c1; extern xb3_3dpointcloud_message pointcloud_msg_hokuyo; extern xb3_3dpointcloud_message pointcloud_msg_3dlaser; extern carmen_ptucontrol_status_message ptu_status; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc
#ifndef _GPS_H_ #define _GPS_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ############################################## //#################################################################### //from gps-io.c #include <lar/gps_interface.h> #include <stdio.h> #include <stdlib.h> #include <string.h> #include <signal.h> #include <math.h> #include <unistd.h> #include <termios.h> #include <fcntl.h> #include <sys/signal.h> #include <sys/types.h> #include <sys/time.h> #include <sys/ioctl.h> //from old gps.h #define MAX_NAME_LENGTH 256 #define MAX_COMMAND_LENGTH 256 #define EPSILON 0.0001 #define TIMEOUT -1 #define WRONG 0 #define OK 1 //from old gps-io.c #define DEFAULT_GPS_PORT "/dev/ttyUSB0" #define DEFAULT_GPS_BAUD 4800 #define DEFAULT_GPS_PARITY NO #define DEFAULT_GPS_DATABITS 8 #define DEFAULT_GPS_STOPBITS 1 #define DEFAULT_GPS_HWF 1 #define DEFAULT_GPS_SWF 0 #define BUFFER_LENGTH 512 //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################## //#################################################################### enum PARITY_TYPE { NO, EVEN, ODD }; typedef struct { char ttyport[MAX_NAME_LENGTH]; int baud; enum PARITY_TYPE parity; FILE * fp; int fd; int databits; int stopbits; int hwf; int swf; } SerialDevice; //#################################################################### // Prototypes: for private functions can be declared ################ // in gps.c or preferably in gps_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); int carmen_gps_parse_data( char * line, int num_chars ); void DEVICE_set_params( SerialDevice dev ); void DEVICE_set_baudrate( SerialDevice dev, int brate ); int DEVICE_connect_port( SerialDevice *dev ); int DEVICE_send( SerialDevice dev, unsigned char *cmd, int len ); int DECVICE_recieve( SerialDevice dev, unsigned char *cmd, int *len ); int DEVICE_read_data( SerialDevice dev ); int DEVICE_bytes_waiting( int sd ); void DEVICE_init_params( SerialDevice *p ); #ifdef _GPS_CPP_ /*or _GPS_C_, depends on the file type*/ //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### TYPE_executionflags flags; //the command line parameters flags char* comport; int baudrate; gps_gpgga_data_message gpgga_msg; //this is a structure gps_gprmc_data_message gprmc_msg; //this is a structure gps_gpgga_data_message *gps_extern_gpgga_ptr; //this are pointers to the structure gps_gprmc_data_message *gps_extern_gprmc_ptr; //this are pointers to the structure carmen_param_t gps_params[] = { {(char*)"gps", (char*)"comport", CARMEN_PARAM_STRING, &comport, 0, NULL}, {(char*)"gps", (char*)"baudrate", CARMEN_PARAM_INT, &baudrate, 0, NULL} }; //prepare param struct #else extern TYPE_executionflags flags; extern gps_gpgga_data_message gpgga_msg; //this is a structure extern gps_gprmc_data_message gprmc_msg; //this is a structure extern gps_gpgga_data_message * gps_extern_gpgga_ptr; extern gps_gprmc_data_message * gps_extern_gprmc_ptr; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent: SIGINT etc interrupt signal
- Returns:
- void
#ifndef _XSENS_H_ #define _XSENS_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/xsens_interface.h> #include <curses.h> #include "cmtdef.h" #include "xsens_time.h" #include "xsens_list.h" #include "cmtscan.h" #include "cmt3.h" #include "example_linux.h" // this macro tests for an error and exits the program with a message if there was one #define EXIT_ON_ERROR(res,comment) if (res != XRV_OK) { printw("Error %d occurred in " comment ": %s\n",res,xsensResultText(res)); exit(1); } using namespace xsens; //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### //#################################################################### // Prototypes: for private functions can be declared ################# // in xsens.c or preferably in xsens_functions.c ## //#################################################################### int main(int argc, char **argv); void shutdown_module(int x); void handler_param_daemon(char *a, char *b, char *c); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _XSENS_CPP_ /*or _XSENS_C_, depends on the file type*/ TYPE_executionflags flags; //the command line parameters flags xsens_data_message data_msg; // TYPE_xsens_public_params params; char *comport; Packet* packet; xsens::Cmt3 cmt3; //create an xsens structure carmen_param_t xsens_params[] = { {(char*)"xsens", (char*)"comport", CARMEN_PARAM_STRING, &comport, 0, NULL} // {(char*)"xsens", (char*)"comport", CARMEN_PARAM_STRING, &msg.comport, 0, NULL} }; //prepare param struct #else extern TYPE_executionflags flags; extern xsens_data_message msg; // extern TYPE_xsens_public_params params; extern char *comport; extern Packet* packet; extern xsens::Cmt3 cmt3; //create an xsens structure #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent, SIGINT etcr x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
- Parameters:
-
x the SIGNAL
- Todo:
- many modules use this. Should be an util library.
#ifndef _ACL_H_ #define _ACL_H_ #define _DO_NOT_USE_OPENCV_ 0 #define _DO_NOT_USE_CARMEN_ 0 //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/lar.h> #include <lar/acl_interface.h> //#################################################################### // Typedefs: required typedefs are declared here. All declared types # // should have TYPE_[the name] ############################### //#################################################################### #define MAX_PTS 4 #define MAX_REGIONS 10 #define NUM_FOR_AVG_CALC 25 typedef struct { double avg; double std; double minVal, maxVal; }TYPE_color_values; typedef struct { CvPoint pts[MAX_PTS]; int num_pts; char name[20]; TYPE_color_values h_values, v_values, s_values; IplImage* mask; IplImage* img_debug; CvMemStorage* mem_storage; CvSeq* hsv_lim_seq; }TYPE_region; typedef struct{ TYPE_region* region[MAX_REGIONS]; int num_regions; CvSize src_img_size; double times_std; double move_avg; IplImage* src; IplImage* gui; IplImage* hsv; IplImage* h; IplImage* s; IplImage* v; }TYPE_pts_mask; typedef struct { double h_min; double h_max; double s_min; double s_max; double v_min; double v_max; }TYPE_hsv_avg_std; //#################################################################### // Prototypes: for private functions can be declared ################# // in acl.c or preferably in acl_functions.c ## //#################################################################### void heartbeat_handler_n3(carmen_heartbeat_message *heartbeat_msg); int main(int argc, char **argv); void shutdown_module(int x); void set_mask(IplImage* src, TYPE_region* region, TYPE_executionflags* flg); void draw_bound(IplImage* src, TYPE_region* region); int load_pts(char *file_name, TYPE_pts_mask* mask); void get_values(char *str, TYPE_region* region, int start); void read_line(FILE* buffer,char *line); //#################################################################### // Global vars: They will be in the scope of modulename.c main's ##### // otherwise are declared extern ##################################### //#################################################################### #ifdef _ACL_CPP_ /*or _ACL_C_, depends on the file type*/ #define saturatemax(val,max) ((val)>(max) ?( max) :( val)) #define saturatemin(val,min) ((val)<(min) ?( min) :( val)) #define AVG(a,b) ((a+b)/2.0) TYPE_pts_mask pts_mask; TYPE_region* actual_region; CvPoint pts[MAX_PTS]; TYPE_acl_color_limits color_limits; TYPE_hsv_avg_std tmp_hsv_avg_std; CvFont Font; int num_pts=-1; char filename[1024]; FILE* file_data; camera_image_message c3; int c3_alloc=1; char firei_n3_msg_heart_beat = 0; c_timer timer; double ts; int cycle_freq; TYPE_executionflags flags; //the command line parameters flags acl_data_message msg; carmen_param_t module_refresh_params[] = { {(char*)"freq", (char*)"acl", CARMEN_PARAM_INT, &cycle_freq, 1, NULL}, }; carmen_param_t acl_camera_params[] = { {(char*)"camera3", (char*)"imagewidth", CARMEN_PARAM_INT, &pts_mask.src_img_size.width, 1, NULL}, {(char*)"camera3", (char*)"imageheight", CARMEN_PARAM_INT, &pts_mask.src_img_size.height, 1, NULL}, };//prepare param struct from the image that camera3 will give carmen_param_t acl_params[] = { {(char*)"acl", (char*)"times_std", CARMEN_PARAM_DOUBLE, &pts_mask.times_std, 1, NULL}, {(char*)"acl", (char*)"move_avg", CARMEN_PARAM_DOUBLE, &pts_mask.move_avg, 1, NULL}, }; //prepare param struct #else extern TYPE_executionflags flags; extern acl_data_message msg; #endif #endif
Does a safe shutdown. Disconnects from IPC. Other modules could deallocate memory, disconnect from hardware etc.
- Parameters:
-
x the type of signal sent, SIGINT etcr
makes a clean shutdown of the program
Disconnects from ipc and releases video writer
- Parameters:
-
x Signal value. To shutdown signal must be SIGINT
| int logger::StartLog | ( | void | ) | [inherited] |
This function start the log parser This function creates a new log parser and sets the begin of the XML log header.
- Returns:
- return error, 0 means no error,
Start the writer
Use indent on XML
Start LOG
Set logid
Set logid
Create new DOM
Set root node with attributes
References logger::compression, logger::struct_file_handle::doc, logger::encoding, logger::file_handle, LOG_VERSION, logger::struct_file_handle::name, perr, logger::rc, logger::struct_file_handle::root, logger::SEQUENCIAL, logger::TREE, TRUE, logger::write_mode, and logger::struct_file_handle::writer.
| void logger::SubscribeMessages | ( | void | ) | [inherited] |
Subscribe IPC Messages This function subscribes all the predefined message types.
References i, logger::message_types, MessageCatcher(), null, and logger::total_message_types.

| void update_xpath_nodes | ( | xmlNodeSetPtr | nodes, | |
| const xmlChar * | value | |||
| ) |
| int logger::UpdateStatistics | ( | void | ) | [inherited] |
Updade a posteriory statistics This function updates the log header with a posteriory statistics, it opens the file again parses it and updates the correct fields using Xpath.
- Returns:
- return error, 0 means no error,
Change the total message number corresponding to this specific type of message
Change the mean_mps corresponding to this specific type of message
References logger::struct_file_handle::doc, logger::encoding, logger::file_handle, i, logger::log_start_time, logger::message_types, logger::struct_file_handle::name, perr, logger::text, logger::total_message_types, logger::total_number_messages, update_xpath_nodes(), logger::struct_file_handle::xpathCtx, and logger::struct_file_handle::xpathObj.

| int logger::WriteHeader | ( | void | ) | [inherited] |
Write log header This function writes the log header, the header constains, list of sessions, list of sensors and list of messages.
- Returns:
- return error, 0 means no error,
Start Header
End Header
Flush the buffer
References AddComment(), logger::file_handle, logger::struct_file_handle::header, perr, logger::rc, logger::struct_file_handle::root, logger::SEQUENCIAL, logger::TREE, logger::write_mode, logger::WriteMessageTypes(), logger::struct_file_handle::writer, logger::WriteSensorList(), and logger::WriteSession().
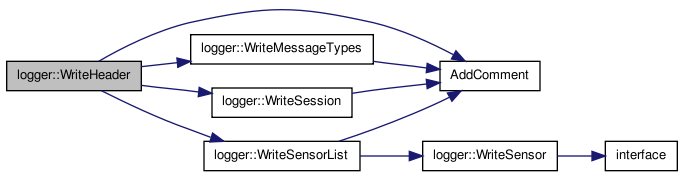
| int logger::WriteMessageTypes | ( | void | ) | [private, inherited] |
Write a list of all message types This function writes a list of all message types to be logged.
- Returns:
- return error, 0 means no error,
Start MESSAGE_TYPES
Start M_TYPE
Add message type id
Add the type name
Add the format
Add the data file
End M_TYPE
End MESSAGE_TYPES
Message typesg
Total number of messsages
Add message type id
Add the type name
Add the format
Add the data file
Total number of messsages
Add the data file
References AddComment(), logger::struct_message_types::data_file, logger::file_handle, format, logger::struct_message_types::format, logger::struct_file_handle::header, i, logger::message_types, logger::struct_file_handle::messages_types, logger::struct_message_types::name, logger::node, perr, logger::rc, logger::SEQUENCIAL, logger::text, logger::total_message_types, logger::struct_file_handle::total_messages, logger::struct_file_handle::total_messages_type, logger::total_number_messages, logger::TREE, logger::write_mode, and logger::struct_file_handle::writer.
Referenced by logger::WriteHeader().


| int logger::WriteSensor | ( | unsigned int | number | ) | [private, inherited] |
Write a single sensor This function writes a single sensor into the log. Sensor are obtained using logger::GetSensors, sensor information contain: id, type, vendor, data interface, placement and if it a camera it also contains focal distance and resolution.
- Parameters:
-
number sensor id number
- Returns:
- return error, 0 means no error,
Start SENSOR
End SENSOR
References logger::file_handle, logger::struct_sensor::id, interface(), logger::struct_sensor::interface, perr, logger::rc, logger::struct_file_handle::sensor_list, logger::sensors, logger::SEQUENCIAL, logger::TREE, logger::struct_sensor::type, logger::struct_sensor::vendor, logger::write_mode, and logger::struct_file_handle::writer.
Referenced by logger::WriteSensorList().


| int logger::WriteSensorList | ( | void | ) | [private, inherited] |
Write sensor list This function writes a sensor list onto the log.
- Returns:
- return error, 0 means no error,
Start SENSOR_LIST
End SENSOR_LIST
Sensor list
References AddComment(), logger::file_handle, logger::struct_file_handle::header, i, logger::number_sensors, perr, logger::rc, logger::struct_file_handle::sensor_list, logger::SEQUENCIAL, logger::TREE, logger::write_mode, logger::struct_file_handle::writer, and logger::WriteSensor().
Referenced by logger::WriteHeader().


| int logger::WriteSession | ( | void | ) | [private, inherited] |
Write session This function writes a log session onto a file. The log session contains the time and data of the log, the computer name, the session id, the start and end location, the driver of the car, car odometer information and weather conditions.
- Returns:
- return error, 0 means no error,
Get date
Start SESSION
Start WEATHER_CONDITION
End WEATHER_CONDITION
End SESSION
Session
Weather
References AddComment(), logger::file_handle, logger::struct_file_handle::header, perr, logger::rc, logger::struct_file_handle::root, logger::SEQUENCIAL, logger::session_id, logger::text, tm, logger::TREE, logger::write_mode, and logger::struct_file_handle::writer.
Referenced by logger::WriteHeader().


| void xb3_handler | ( | xb3_3dpointcloud_message * | xb3 | ) |
Handler for xb3 messages, when a message is recived it is saved to the log.
- Parameters:
-
xb3 message recived
- Returns:
- void
| void xb3_image_handler | ( | xb3_stereoimage_message * | xb3 | ) |
Handler for xb3 image messages, when a message is recived it is saved to the log.
- Parameters:
-
xb3 message recived
- Returns:
- void
| logger::~logger | ( | ) | [inherited] |
Deconstructur for the logger class.
Variable Documentation
| carmen_FILE* datafile |
Include the interface.
#ifndef _FOVEATIONCONTROL_INTERFACE_H_ #define _FOVEATIONCONTROL_INTERFACE_H_ //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/lar.h> #include <lar/foveationcontrol_messages.h> //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef TYPE_xbcameratmatrix_params TYPE_foveationcontrolmatrix_params; //#################################################################### // Prototypes: public functions can be declared here ################ //#################################################################### int foveationcontrol_publish_pointto_xyz(foveationcontrol_pointto_xyz_message *msg); int foveationcontrol_subscribe_pointto_xyz(foveationcontrol_pointto_xyz_message *msg, carmen_handler_t handler, carmen_subscribe_t subscribe_how); void param_daemon_install_foveationcontrolmatrix_params(TYPE_foveationcontrolmatrix_params *p, int subscribe_changes, int verbose); #endif
#ifndef _LAR_H_ #define _LAR_H_ #define PFLN {printf("DEBUG PRINT FILE %s LINE %d\n",__FILE__,__LINE__);} #define PLN {printf("DEBUG PRINT LINE %d\n",__LINE__);} #define PVV(a) {printf("DEBUG PRINT FILE %s LINE %d value = %d\n",__FILE__, __LINE__,(int)(a));} #define _cast_to_carmen_param_change_handler_t_ (void (*)(char*, char*,char*)) #define printc(a,b) {printf("%c[1;%d;48m", 0x1B, (b) +30);printf(a);printf("\33[0m");fflush(stdout);} #define printnc(a,b,c) {printf("%c[1;%d;48m", 0x1B, (c) +30);printf(a,b);printf("\33[0m");fflush(stdout);} #include <sys/ipc.h> //System includes to use shared mem #include <sys/shm.h> //System includes to use shared mem using namespace std; #include <iostream> #if (! _DO_NOT_USE_OPENCV_) /*opencv includes*/ #include <opencv/cv.h> #include <opencv/cxcore.h> #include <opencv/highgui.h> #include <opencv/cvaux.h> #endif #if (! _DO_NOT_USE_CARMEN_ ) /*carmen includes*/ #include <carmen/carmen.h> #endif //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef struct { int send; double timestamp; char *host; }global_dummy_message; typedef struct { int shm_id; int shm_size; double timestamp; char *host; }global_shminfo_message; //#################################################################### // LAR includes: ############################################## //#################################################################### #include <lar/timer.h> #include <lar/pixelaccess.h> #include <lar/errorhandling.h> #include <lar/readcommandlineparameters.h> #include <lar/lensundistort.h> #include <lar/videosaving.h> #include <lar/imageprocessing.h> #include <lar/acl_interface.h> #include <lar/crc.h> #include <lar/moduletemplate_interface.h> #include <lar/xbee_interface.h> #include <lar/ptucontrol_interface.h> #include <lar/atlas2000_interface.h> #include <lar/atlasmv_interface.h> #include <lar/powermanager_interface.h> #include <lar/des70_10.h> #include <lar/soundplayer_interface.h> #include <lar/soundplayer_messages.h> #include <lar/processcontrol_interface.h> #include <lar/processcontrol_messages.h> #include <lar/gps_interface.h> #include <lar/xsens_interface.h> #include <lar/firei_interface.h> #include <lar/flea2_interface.h> #include <lar/xb3_interface.h> //this must be after the xb3_interface #include <lar/foveationcontrol_interface.h> #include <lar/hokuyo_utm_interface.h> #include <lar/laser3d_interface.h> #include <lar/ipm_interface.h> #include <lar/egomotiongpsimu_interface.h> //#include <lar/agent_tracker_interface.h> #include <lar/agent_clearance_interface.h> #include <lar/cdltm_interface.h> //#include <lar/lmssp_interface.h> #include <lar/rtbm_interface.h> #include <lar/potkf_interface.h> #include <lar/tlcstm_interface.h> #include <lar/cwtm_interface.h> #include <lar/tlhfcs_interface.h> #include <lar/pdtm_interface.h> #include <lar/cwpc_interface.h> #include <lar/vscshfba_interface.h> #include <lar/cm_interface.h> #include <lar/mptn2d_interface.h> #include <lar/agents_interface.h> #include <lar/roc_interface.h> #endif
Include global headers.
#ifndef _POWERMANAGER_INTERFACE_H_ #define _POWERMANAGER_INTERFACE_H_ //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/lar.h> #include <lar/powermanager_messages.h> //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef enum { Y0_LAS0 = 130, Y1_PTU, Y2_R1394_0, Y3_BUMBLEBEE, Y4_NA, Y5_NA, Y6_NA, Y7_NA, Y10_ROUTER, Y11_SWITCH, Y12_GPS, Y13_NA }ENUM_plc_outputs; //#################################################################### // Prototypes: public functions can be declared here ################ //#################################################################### int powermanager_publish_status(powermanager_status_message *msg); int powermanager_subscribe_status(powermanager_status_message *msg, carmen_handler_t handler, carmen_subscribe_t subscribe_how); int powermanager_turn_on(ENUM_plc_outputs output); int powermanager_turn_off(ENUM_plc_outputs output); int powermanager_reset(ENUM_plc_outputs output); int powermanager_subscribe_command(powermanager_command_message *msg, carmen_handler_t handler, carmen_subscribe_t subscribe_how); #endif
#ifndef _LAR_H_ #define _LAR_H_ #define PFLN {printf("DEBUG PRINT FILE %s LINE %d\n",__FILE__,__LINE__);} #define PLN {printf("DEBUG PRINT LINE %d\n",__LINE__);} #define PVV(a) {printf("DEBUG PRINT FILE %s LINE %d value = %d\n",__FILE__, __LINE__,(int)(a));} #define _cast_to_carmen_param_change_handler_t_ (void (*)(char*, char*,char*)) #define printc(a,b) {printf("%c[1;%d;48m", 0x1B, (b) +30);printf(a);printf("\33[0m");fflush(stdout);} #define printnc(a,b,c) {printf("%c[1;%d;48m", 0x1B, (c) +30);printf(a,b);printf("\33[0m");fflush(stdout);} #include <sys/ipc.h> //System includes to use shared mem #include <sys/shm.h> //System includes to use shared mem using namespace std; #include <iostream> #if (! _DO_NOT_USE_OPENCV_) /*opencv includes*/ #include <opencv/cv.h> #include <opencv/cxcore.h> #include <opencv/highgui.h> #include <opencv/cvaux.h> #endif #if (! _DO_NOT_USE_CARMEN_ ) /*carmen includes*/ #include <carmen/carmen.h> #endif //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef struct { int send; double timestamp; char *host; }global_dummy_message; typedef struct { int shm_id; int shm_size; double timestamp; char *host; }global_shminfo_message; //#################################################################### // LAR includes: ############################################## //#################################################################### #include <lar/timer.h> #include <lar/pixelaccess.h> #include <lar/errorhandling.h> #include <lar/readcommandlineparameters.h> #include <lar/lensundistort.h> #include <lar/videosaving.h> #include <lar/imageprocessing.h> #include <lar/acl_interface.h> #include <lar/crc.h> #include <lar/moduletemplate_interface.h> #include <lar/xbee_interface.h> #include <lar/ptucontrol_interface.h> #include <lar/atlas2000_interface.h> #include <lar/atlasmv_interface.h> #include <lar/powermanager_interface.h> #include <lar/des70_10.h> #include <lar/soundplayer_interface.h> #include <lar/soundplayer_messages.h> #include <lar/processcontrol_interface.h> #include <lar/processcontrol_messages.h> #include <lar/gps_interface.h> #include <lar/xsens_interface.h> #include <lar/firei_interface.h> #include <lar/flea2_interface.h> #include <lar/xb3_interface.h> //this must be after the xb3_interface #include <lar/foveationcontrol_interface.h> #include <lar/hokuyo_utm_interface.h> #include <lar/laser3d_interface.h> #include <lar/ipm_interface.h> #include <lar/egomotiongpsimu_interface.h> //#include <lar/agent_tracker_interface.h> #include <lar/agent_clearance_interface.h> #include <lar/cdltm_interface.h> //#include <lar/lmssp_interface.h> #include <lar/rtbm_interface.h> #include <lar/potkf_interface.h> #include <lar/tlcstm_interface.h> #include <lar/cwtm_interface.h> #include <lar/tlhfcs_interface.h> #include <lar/pdtm_interface.h> #include <lar/cwpc_interface.h> #include <lar/vscshfba_interface.h> #include <lar/cm_interface.h> #include <lar/mptn2d_interface.h> #include <lar/agents_interface.h> #include <lar/roc_interface.h> #endif
Include global headers.
#ifndef _XBEE_INTERFACE_H_ #define _XBEE_INTERFACE_H_ //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/lar.h> #include <lar/xbee_messages.h> //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef struct{ double sleeptime; char otherparam; } TYPE_xbee_public_params; //#################################################################### // Prototypes: public functions can be declared here ################ //#################################################################### int xbee_publish_rx_data(xbee_rx_data_message *msg); int xbee_subscribe_rx_data(xbee_rx_data_message *msg, carmen_handler_t handler, carmen_subscribe_t subscribe_how); int xbee_publish_tx_data(xbee_tx_data_message *msg); int xbee_subscribe_tx_data(xbee_tx_data_message *msg, carmen_handler_t handler, carmen_subscribe_t subscribe_how); void xbee_param_daemon_install_public_parameters(TYPE_xbee_public_params *p, int subscribe_changes, int verbose); #endif
#ifndef _LAR_H_ #define _LAR_H_ #define PFLN {printf("DEBUG PRINT FILE %s LINE %d\n",__FILE__,__LINE__);} #define PLN {printf("DEBUG PRINT LINE %d\n",__LINE__);} #define PVV(a) {printf("DEBUG PRINT FILE %s LINE %d value = %d\n",__FILE__, __LINE__,(int)(a));} #define _cast_to_carmen_param_change_handler_t_ (void (*)(char*, char*,char*)) #define printc(a,b) {printf("%c[1;%d;48m", 0x1B, (b) +30);printf(a);printf("\33[0m");fflush(stdout);} #define printnc(a,b,c) {printf("%c[1;%d;48m", 0x1B, (c) +30);printf(a,b);printf("\33[0m");fflush(stdout);} #include <sys/ipc.h> //System includes to use shared mem #include <sys/shm.h> //System includes to use shared mem using namespace std; #include <iostream> #if (! _DO_NOT_USE_OPENCV_) /*opencv includes*/ #include <opencv/cv.h> #include <opencv/cxcore.h> #include <opencv/highgui.h> #include <opencv/cvaux.h> #endif #if (! _DO_NOT_USE_CARMEN_ ) /*carmen includes*/ #include <carmen/carmen.h> #endif //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef struct { int send; double timestamp; char *host; }global_dummy_message; typedef struct { int shm_id; int shm_size; double timestamp; char *host; }global_shminfo_message; //#################################################################### // LAR includes: ############################################## //#################################################################### #include <lar/timer.h> #include <lar/pixelaccess.h> #include <lar/errorhandling.h> #include <lar/readcommandlineparameters.h> #include <lar/lensundistort.h> #include <lar/videosaving.h> #include <lar/imageprocessing.h> #include <lar/acl_interface.h> #include <lar/crc.h> #include <lar/moduletemplate_interface.h> #include <lar/xbee_interface.h> #include <lar/ptucontrol_interface.h> #include <lar/atlas2000_interface.h> #include <lar/atlasmv_interface.h> #include <lar/powermanager_interface.h> #include <lar/des70_10.h> #include <lar/soundplayer_interface.h> #include <lar/soundplayer_messages.h> #include <lar/processcontrol_interface.h> #include <lar/processcontrol_messages.h> #include <lar/gps_interface.h> #include <lar/xsens_interface.h> #include <lar/firei_interface.h> #include <lar/flea2_interface.h> #include <lar/xb3_interface.h> //this must be after the xb3_interface #include <lar/foveationcontrol_interface.h> #include <lar/hokuyo_utm_interface.h> #include <lar/laser3d_interface.h> #include <lar/ipm_interface.h> #include <lar/egomotiongpsimu_interface.h> //#include <lar/agent_tracker_interface.h> #include <lar/agent_clearance_interface.h> #include <lar/cdltm_interface.h> //#include <lar/lmssp_interface.h> #include <lar/rtbm_interface.h> #include <lar/potkf_interface.h> #include <lar/tlcstm_interface.h> #include <lar/cwtm_interface.h> #include <lar/tlhfcs_interface.h> #include <lar/pdtm_interface.h> #include <lar/cwpc_interface.h> #include <lar/vscshfba_interface.h> #include <lar/cm_interface.h> #include <lar/mptn2d_interface.h> #include <lar/agents_interface.h> #include <lar/roc_interface.h> #endif
Include global headers.
#ifndef _MODULETEMPLATE_INTERFACE_H_ #define _MODULETEMPLATE_INTERFACE_H_ //#################################################################### // Includes: no need to include headers from carmen modules carmen.h # // already does ##################################### //#################################################################### #include <lar/lar.h> #include <lar/moduletemplate_messages.h> //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef struct{ double sleeptime; char otherparam; } TYPE_moduletemplate_public_params; //#################################################################### // Prototypes: public functions can be declared here ################ //#################################################################### int moduletemplate_publish_data(moduletemplate_data_message *msg); int moduletemplate_subscribe_data(moduletemplate_data_message *msg, carmen_handler_t handler, carmen_subscribe_t subscribe_how); void moduletemplate_param_daemon_install_public_parameters(TYPE_moduletemplate_public_params *p, int subscribe_changes, int verbose); #endif
#ifndef _LAR_H_ #define _LAR_H_ #define PFLN {printf("DEBUG PRINT FILE %s LINE %d\n",__FILE__,__LINE__);} #define PLN {printf("DEBUG PRINT LINE %d\n",__LINE__);} #define PVV(a) {printf("DEBUG PRINT FILE %s LINE %d value = %d\n",__FILE__, __LINE__,(int)(a));} #define _cast_to_carmen_param_change_handler_t_ (void (*)(char*, char*,char*)) #define printc(a,b) {printf("%c[1;%d;48m", 0x1B, (b) +30);printf(a);printf("\33[0m");fflush(stdout);} #define printnc(a,b,c) {printf("%c[1;%d;48m", 0x1B, (c) +30);printf(a,b);printf("\33[0m");fflush(stdout);} #include <sys/ipc.h> //System includes to use shared mem #include <sys/shm.h> //System includes to use shared mem using namespace std; #include <iostream> #if (! _DO_NOT_USE_OPENCV_) /*opencv includes*/ #include <opencv/cv.h> #include <opencv/cxcore.h> #include <opencv/highgui.h> #include <opencv/cvaux.h> #endif #if (! _DO_NOT_USE_CARMEN_ ) /*carmen includes*/ #include <carmen/carmen.h> #endif //#################################################################### // Typedefs:Declare here structs that have interesting params for #### // other modules besides this one, but that will not be sent through # // messages. A function to install this struct with param daemon ##### // should be declared ################################################ //#################################################################### typedef struct { int send; double timestamp; char *host; }global_dummy_message; typedef struct { int shm_id; int shm_size; double timestamp; char *host; }global_shminfo_message; //#################################################################### // LAR includes: ############################################## //#################################################################### #include <lar/timer.h> #include <lar/pixelaccess.h> #include <lar/errorhandling.h> #include <lar/readcommandlineparameters.h> #include <lar/lensundistort.h> #include <lar/videosaving.h> #include <lar/imageprocessing.h> #include <lar/acl_interface.h> #include <lar/crc.h> #include <lar/moduletemplate_interface.h> #include <lar/xbee_interface.h> #include <lar/ptucontrol_interface.h> #include <lar/atlas2000_interface.h> #include <lar/atlasmv_interface.h> #include <lar/powermanager_interface.h> #include <lar/des70_10.h> #include <lar/soundplayer_interface.h> #include <lar/soundplayer_messages.h> #include <lar/processcontrol_interface.h> #include <lar/processcontrol_messages.h> #include <lar/gps_interface.h> #include <lar/xsens_interface.h> #include <lar/firei_interface.h> #include <lar/flea2_interface.h> #include <lar/xb3_interface.h> //this must be after the xb3_interface #include <lar/foveationcontrol_interface.h> #include <lar/hokuyo_utm_interface.h> #include <lar/laser3d_interface.h> #include <lar/ipm_interface.h> #include <lar/egomotiongpsimu_interface.h> //#include <lar/agent_tracker_interface.h> #include <lar/agent_clearance_interface.h> #include <lar/cdltm_interface.h> //#include <lar/lmssp_interface.h> #include <lar/rtbm_interface.h> #include <lar/potkf_interface.h> #include <lar/tlcstm_interface.h> #include <lar/cwtm_interface.h> #include <lar/tlhfcs_interface.h> #include <lar/pdtm_interface.h> #include <lar/cwpc_interface.h> #include <lar/vscshfba_interface.h> #include <lar/cm_interface.h> #include <lar/mptn2d_interface.h> #include <lar/agents_interface.h> #include <lar/roc_interface.h> #endif
Include global headers.
| carmen_laser_laser_message* hokuyo_message |
Referenced by heartbeat_handler(), hokuyo_heartbeat_handler(), and main().
{
{(char*)ROBOT_MOTION_COMMAND_FMT , NULL},
{(char*)ROBOT_LIGHTS_COMMAND_FMT , NULL},
{(char*)LASER3D_POINTCLOUD_MESSAGE_FMT , NULL},
{(char*)CAMERA_N0_IMAGE_FMT , NULL},
{(char*)CAMERA_N1_IMAGE_FMT , NULL},
{(char*)CAMERA_N2_IMAGE_FMT , NULL},
{(char*)CAMERA_N3_IMAGE_FMT , NULL},
{(char*)IPM_SERVER_DATA_MESSAGE_FMT, NULL},
{(char*)IPM_HEARTBEAT_MESSAGE_FMT , NULL},
{(char*)CAMERA_N3_IMAGE_FMT , NULL},
{(char*)HOKUYO_UTM_SERVER_DATA_FMT , NULL},
{(char*)HOKUYO_UTM_HEARTBEAT_FMT , NULL},
{(char*)XSENS_DATA_MESSAGE_FMT , NULL},
{(char*)XB3_3DPOINTCLOUD_MESSAGE_FMT , NULL},
{(char*)GPS_GPGGA_DATA_MESSAGE_FMT , NULL},
{(char*)GPS_GPRMC_DATA_MESSAGE_FMT , NULL},
{(char*)HOKUYO_POINTCLOUD_MESSAGE_FMT , NULL},
{(char*)XB3_STEREOIMAGE_MESSAGE_FMT , NULL}
}
| carmen_param_t logger_params[] |
{
{(char*)"recorder", (char*)"robot_motion_command", CARMEN_PARAM_ONOFF, &log_param.motion_command, 0, NULL},
{(char*)"recorder", (char*)"cameras_image", CARMEN_PARAM_ONOFF, &log_param.firei_cameras, 0, NULL},
{(char*)"recorder", (char*)"camera_n3_shm", CARMEN_PARAM_ONOFF, &log_param.firei_server_camera_3, 0, NULL},
{(char*)"recorder", (char*)"ipm_shm", CARMEN_PARAM_ONOFF, &log_param.ipm, 0, NULL},
{(char*)"recorder", (char*)"laser3d_pointcloud", CARMEN_PARAM_ONOFF, &log_param.laser3d, 0, NULL},
{(char*)"recorder", (char*)"hokuyo_shm", CARMEN_PARAM_ONOFF, &log_param.laser2d, 0, NULL},
{(char*)"recorder", (char*)"xsens_data", CARMEN_PARAM_ONOFF, &log_param.imu, 0, NULL},
{(char*)"recorder", (char*)"xb3_3dpointcloud", CARMEN_PARAM_ONOFF, &log_param.xb3, 0, NULL},
{(char*)"recorder", (char*)"stereoimage", CARMEN_PARAM_ONOFF, &log_param.xb3_image, 0, NULL},
{(char*)"recorder", (char*)"gps_gpgga_data", CARMEN_PARAM_ONOFF, &log_param.gps, 0, NULL},
{(char*)"recorder", (char*)"hokuyo_pointcloud", CARMEN_PARAM_ONOFF, &log_param.hokuyo_point_cloud, 0, NULL},
}
| double logger_starttime |
| carmen_FILE* outfile |
