types.h file for this module. Contains types and structures used by the application. More...
#include <hitec5980sg/hitec5980sg.h>#include <iostream>#include <pthread.h>#include <gtk/gtk.h>#include <glib.h>#include <boost/lexical_cast.hpp>#include <boost/format.hpp>#include <HD/hd.h>#include <HDU/hduVector.h>#include <HDU/hduError.h>#include <HDU/hduMatrix.h>#include <HDU/hduPlane.h>#include <HL/hl.h>#include <phua_haptic/humanoid_functions.h>#include <ros/ros.h>#include "tf/transform_datatypes.h"#include <tf/transform_broadcaster.h>#include <tf/transform_listener.h>
Include dependency graph for types.h:

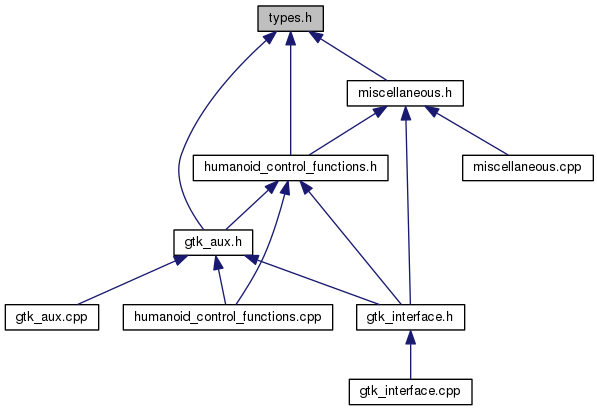
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | DeviceData |
| Holds data/device information retrieved from HDAPI(OpenHaptics3). More... | |
| struct | HapticsData |
| Holds haptics related data and variables. More... | |
| struct | ParameterSet |
| A set of application/funcionality related parameters. More... | |
| struct | RobotKinData |
| Structure to hold current robot joint/cartesian space information. More... | |
| struct | shared_vars_t |
| Shared struture that holds robot/device information. More... | |
| struct | WidgetCollection |
| Collection of interface widgets that are updated/changed on runtime or needed for some other matter. More... | |