laser3d_subscribeexample.cpp File Reference
#include "laser3d_interface.h"#include "laser3d_subscribeexample.h"#include <gtk/gtk.h>#include <gdk/gdkkeysyms.h>#include <gtkglext-1.0/gtk/gtkgl.h>#include <GL/gl.h>#include <GL/glut.h>
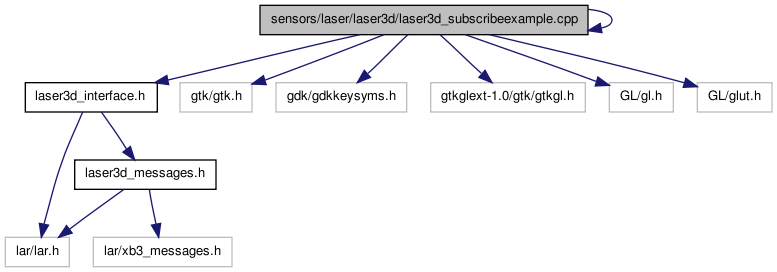
Include dependency graph for laser3d_subscribeexample.cpp:
This graph shows which files directly or indirectly include this file:

Data Structures | |
| struct | TYPE_viewpoint |
| struct | TYPE_staticobjects |
Enumerations | |
| enum | TYPE_event { NOROT = 0, ROT_XY, ROT_Z, MOVE_XY, NOROT = 0, ROT_XY, ROT_Z, MOVE_XY, NOROT = 0, ROT_XY, ROT_Z, MOVE_XY, NOROT = 0, ROT_XY, ROT_Z, MOVE_XY } |
Functions | |
| void | draw_axis_system (void) |
| void | create_axis_system (void) |
| void | load_viewpoint_from_file (char *str) |
| void | save_viewpoint_to_file (void) |
| void | laser3d_allocate_mem () |
| void | shutdown_module (int x) |
| makes a clean shutdown of the program | |
| int | WindowDump (int width, int height, IplImage *src) |
| static void | create_axis_tips (double radius, double height) |
| creates a solid cone used to draw the axis tip. | |
| static void | create_axis_x (int size) |
| creates line segment in the screens x direction. | |
| static void | create_axis_y (int size) |
| creates line segment in the screens y direction. | |
| static void | create_axis_z (int size) |
| creates line segment in the screens x direction. | |
| static void | laser_pts () |
| uses the global variable laser3d in order to produce a 3D point cloud as retrieved from the laser | |
| static void | draw (void) |
| draws the refernce system and calls the point cloud drawing procedure | |
| static void | idle (void) |
| nothing special to do | |
| void | visible (int vis) |
| static void | key (unsigned char k, int x, int y) |
| used by GLUT to handle the behaviour of pressed keys, basically zoom and escape. | |
| static void | special (int k, int x, int y) |
| used by GLUT to handle the behaviour of pressed keys, basically rotations. | |
| static void | reshape (int width, int height) |
| used by GLUT to handle window resizing. | |
| static void | init (int argc, char *argv[]) |
| used by GLUT to initialize the viewing system and necessary lists. | |
| void | mouse (int button, int state, int x, int y) |
| void | motion (int x, int y) |
| static void | laser3d_handler (TYPE_laser3d_pointcloud_message *laser3d) |
| the handler called by subscription routine to get data through IPC | |
| int | main (int argc, char **argv) |
Variables | |
| IplImage * | img_out |
| IplImage * | img |
| char | autorotation = 0 |
| int | visualizingmode |
| TYPE_staticobjects | t_staticobjects |
| TYPE_viewpoint | t_viewpoint |
