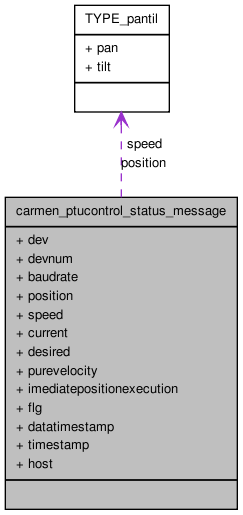
carmen_ptucontrol_status_message Struct Reference
[Ptucontrol]
This is the status message that should informs of the PTU status. More...
#include <ptucontrol_messages.h>
Data Fields | |
| char * | dev |
| int | devnum |
| int | baudrate |
| struct { | |
| TYPE_pantil position | |
| TYPE_pantil speed | |
| } | current |
| struct { | |
| TYPE_pantil position | |
| TYPE_pantil speed | |
| } | desired |
| struct { | |
| char purevelocity | |
| char imediatepositionexecution | |
| } | flg |
| double | datatimestamp |
| double | timestamp |
| char * | host |
Detailed Description
This is the status message that should informs of the PTU status.
Field Documentation
RS232 communications baudrate
| struct { ... } carmen_ptucontrol_status_message::current |
Referenced by ptucontrol_status_handler().
timestamp of message. Should always be here and indicates the message time given by carmen_get_time()
Referenced by ptucontrol_status_handler().
| struct { ... } carmen_ptucontrol_status_message::desired |
Referenced by ptucontrol_command_handler().
the /dev/ttyUSB... device
the device number
| struct { ... } carmen_ptucontrol_status_message::flg |
Referenced by ptucontrol_command_handler(), and ptucontrol_status_handler().
Host computer name from where the message was sent. Always here and given by carmen_get_host()
this is usually on
in radians
Referenced by ptucontrol_command_handler(), and ptucontrol_status_handler().
pure velocity mode is a velocity control of the ptu
Referenced by ptucontrol_command_handler(), and ptucontrol_status_handler().
in radians per sec
Referenced by ptucontrol_command_handler(), and ptucontrol_status_handler().
timestamp of message. Should always be here and indicates the message time given by carmen_get_time()
The documentation for this struct was generated from the following file:
- bases/ptucontrol/ptucontrol_messages.h
