Des70_10
Data Structures | |
| struct | TYPE_des_sysparam |
| data struct with all DES System Parameters definition, all fields have a length of 16bits but the variable range can change normally [0, 32767] More... | |
| struct | TYPE_DES_status_var |
| DES data structure with all status variables, all variables are 16bits except Nb136 that is 32bits (double word). More... | |
| struct | TYPE_msg_frame |
| struct with message frame More... | |
Files | |
| file | des70_10.h |
des70_10.h file for this module. Includes, global vars, funtion prototypes, etc. | |
| file | des70_10_functions.cpp |
Auxiliary functions for this module. This is where private module functions are defined. | |
| file | des70_10_init.cpp |
file containing functions related with variables initialization like des data structures. | |
Defines | |
| #define | _DO_NOT_USE_OPENCV_ 0 |
| #define | _DO_NOT_USE_CARMEN_ 0 |
Enumerations | |
| enum | ENUM_DES_SYS_PARAMS { BAUDRATE = 0, SYS_CONFIG = 1, CUR_REG_GAIN_P = 2, CUR_REG_GAIN_I = 3, MAX_CUR_OUTPUT = 4, SPEED_REG_GAIN_P = 5, SPEED_REG_GAIN_I = 6, INTERNAL_PARAM1 = 7, INTERNAL_PARAM2 = 8, INTERNAL_PARAM3 = 9, MAX_SPEED_ERROR = 10, SETTING_UNIT_GAIN = 11, SETTING_UNIT_OFFSET = 12, SETTING_UNIT_DELAY = 13, PEAK_CURRENT = 14, MAX_CONT_CURRENT = 15, THERM_CONST = 16, MAX_SPEED = 17, ACCELERATION = 18, SPEED_CONSTANT = 19, ENC_RESOLUTION = 20, POLE_PAIR_NUMBER = 21, INTERNAL_PARAM4 = 22, RPM_2QC_FACTOR = 23, INDEX_OFFSET = 24, PWM_PERIOD = 25, MAX_DUTY_CYCLE = 26, CUR_DET_PH_U_OFFSET = 27, CUR_DET_PH_V_OFFSET = 28, AD_CONV_OFFSET = 29, CAN_MODULE_ID = 30, CAN_SERVICE_ID = 31, CAN_RX_PDO_ID = 32, CAN_TX_PDO_ID = 33, CAN_BCR1 = 34, CAN_BCR2 = 35, CAN_OP_MODE = 36, CAN_RX_SDO_ID = 37, CAN_TX_SDO_ID = 38, CAN_RTR0_ID = 39, CAN_RTR1_ID = 40, CAN_CONFIG = 41, INTERNAL_PARAM5 = 42, ERROR_PROC = 43, MAX_SPEED_CURR = 44, HALL_ANGLE_OFFS = 45 } |
enumerator connected with TYPE_des_sysparam and is used when comunication is required with DES servoamplifier More... | |
| enum | ENUM_DES_STATUS_VAR { SYS_OP_STATUS = 128, ACTUAL_MEAN_CUR_D = 129, ACTUAL_MEAN_CUR_Q = 130, CUR_SETTING_VAL = 131, REL_ROT_POS_REV = 132, SPEED_SETTING_VAL = 133, ACTUAL_MEAN_SPEED_VAL = 134, ABS_ROTOR_POS = 135, STANDARD_ERROR = 136, CAN_ERROR = 137, ACTUAL_CUR_Q = 138, ACTUAL_SPEED_VAL = 139, ERROR_HIST1 = 140, ERROR_HIST2 = 141, ENC_COUNTER = 142, ENC_COUNTER_LAST_IND = 143, HALL_SENS_PAT = 144 } |
enumerator connected with DES status var typedefinition, and is used when communicating with DES servo amplifier More... | |
Functions | |
| int | InitDES_communication (char *com_device, int *port, int baud, TYPE_executionflags *flg) |
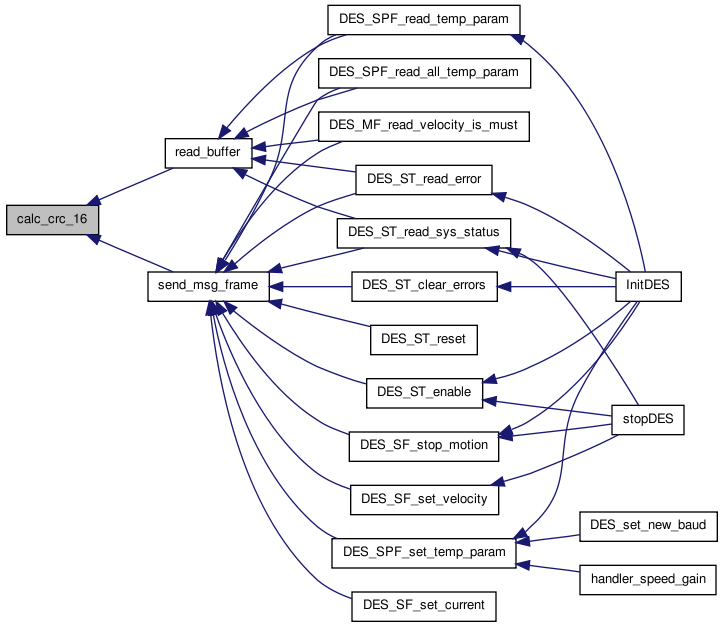
| int | calc_crc_16 (TYPE_msg_frame *msg) |
| function used to get the message crc for 16bits data, the crc is obtained using first the higher byte of the WORD | |
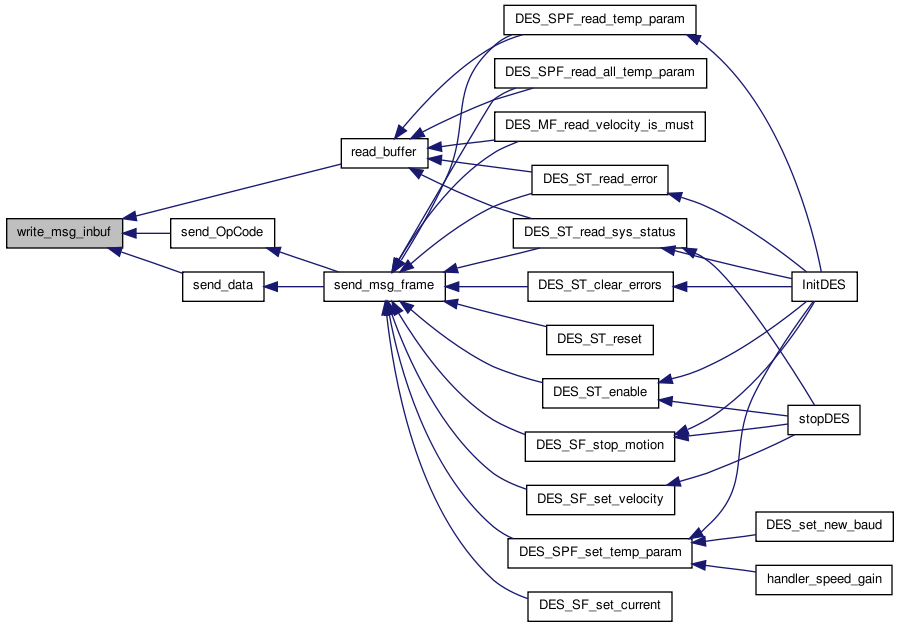
| int | write_msg_inbuf (const int port, unsigned char *data, int size) |
| send to serial port a stream of bytes | |
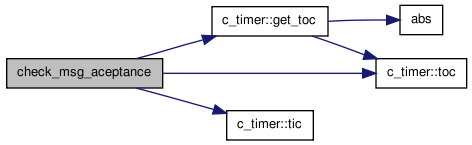
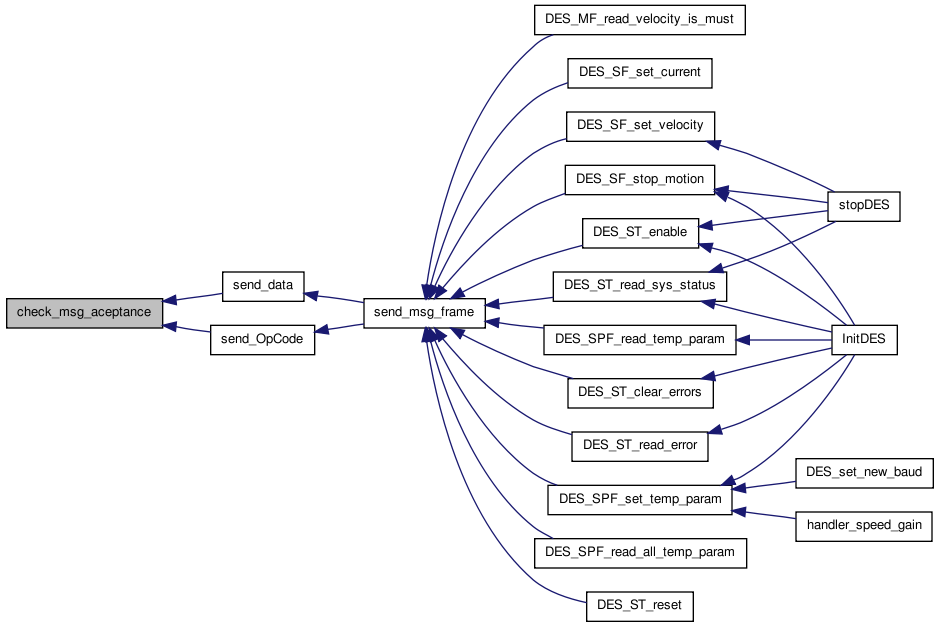
| int | check_msg_aceptance (const int port, float wait_time, unsigned char *msg) |
| int | send_OpCode (const int port, unsigned char tries, unsigned char OpCode, char flg) |
| int | send_data (const int port, TYPE_msg_frame *msg, char flg) |
| int | read_buffer (const int port, TYPE_msg_frame *msg, char flg) |
| int | send_msg_frame (const int port, TYPE_msg_frame *msg, char flg) |
| int | DES_ST_read_sys_status (const int port, int *sys_status, char flg) |
| int | DES_ST_read_error (const int port, int *errors, char flg) |
| int | DES_ST_clear_errors (const int port, char flg) |
| int | DES_ST_reset (const int port, char flg) |
| int | DES_ST_enable (const int port, int *newState, char flg) |
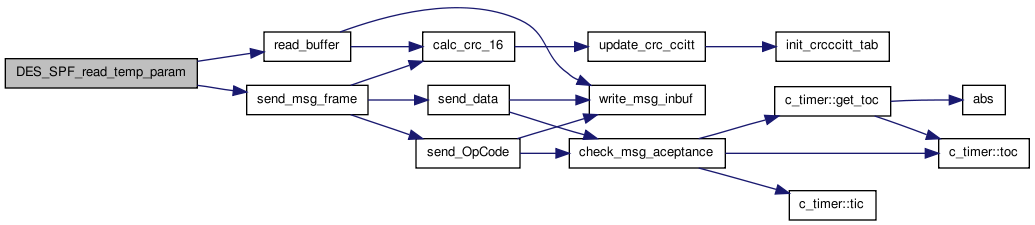
| int | DES_SPF_read_temp_param (const int port, int paramNb, int dataFormat, int *response, char flg) |
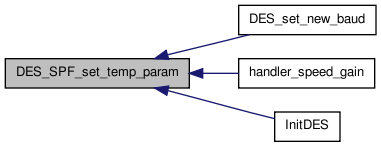
| int | DES_SPF_set_temp_param (const int port, int paramNb, int dataFormat, int *newValue, char flg) |
| Write a new value to a temporary system parameter. Refer to the section about system parameters to find the desired system parameter numbers. SPF is a System Parameter Functions. | |
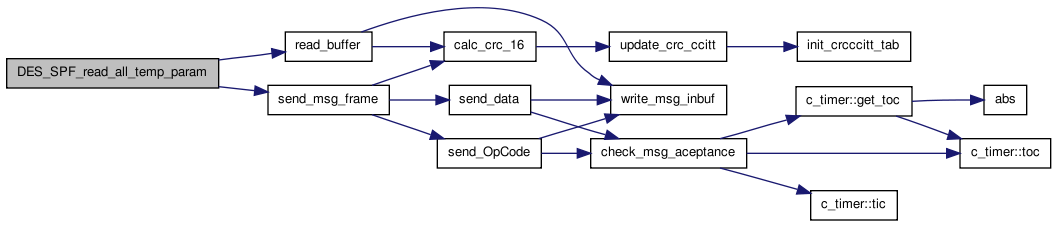
| int | DES_SPF_read_all_temp_param (const int port, TYPE_des_sysparam *sysparam, char flg) |
| Read all temporary system parameters. DES answer the structure described by TYPE_des_sysparam. SPF is a System Parameter Functions. | |
| int | DES_SF_set_velocity (const int port, int newVelocity, char flg) |
| int | DES_SF_set_current (const int port, int newCurrent, char flg) |
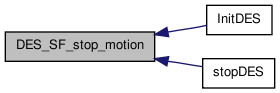
| int | DES_SF_stop_motion (const int port, char flg) |
| This command changes the stopping state. if the motor is already stopped it will be released. Only available in speed regulation mode. SF is a setting function. | |
| int | DES_MF_read_velocity_is_must (const int port, int vel_type, int *velocity, int *requested_vel, char flg) |
| int | InitDES (const int port, TYPE_des_sysparam *newSysParam, char flg) |
| Function that initializes DES servoamplifier with a start configuration. also enables the servoamplifier to be used by software and garantees that the electric brake is not active. | |
| int | stopDES (const int port, char flg) |
| int | DES_set_new_baud (int *port, int baud, char flg) |
Define Documentation
| #define _DO_NOT_USE_CARMEN_ 0 |
| #define _DO_NOT_USE_OPENCV_ 0 |
Enumeration Type Documentation
| enum ENUM_DES_STATUS_VAR |
enumerator connected with DES status var typedefinition, and is used when communicating with DES servo amplifier
| enum ENUM_DES_SYS_PARAMS |
enumerator connected with TYPE_des_sysparam and is used when comunication is required with DES servoamplifier
- Enumerator:
Function Documentation
| int calc_crc_16 | ( | TYPE_msg_frame * | msg | ) |
function used to get the message crc for 16bits data, the crc is obtained using first the higher byte of the WORD
- Parameters:
-
msg - TYPE_msg_frame must be specified previously, were is updated the crc field
- Returns:
- - this function returns always 1 and crc field at msg structure
References TYPE_msg_frame::crc, TYPE_msg_frame::data, i, TYPE_msg_frame::OpCode, TYPE_msg_frame::size, and update_crc_ccitt().
Referenced by read_buffer(), and send_msg_frame().

| int check_msg_aceptance | ( | const int | port, | |
| float | wait_time, | |||
| unsigned char * | msg | |||
| ) |
References c_timer::get_toc(), n, result, c_timer::tic(), and c_timer::toc().
Referenced by send_data(), and send_OpCode().
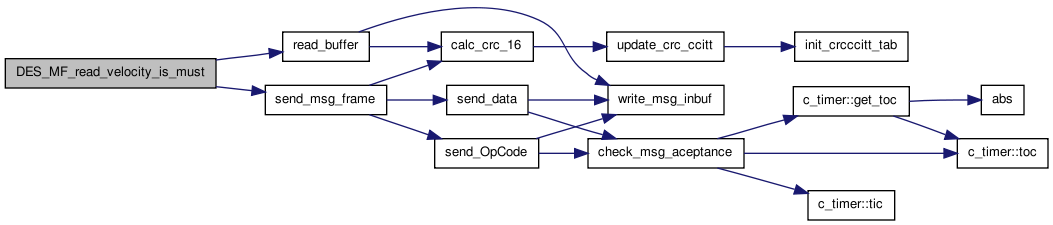
| int DES_MF_read_velocity_is_must | ( | const int | port, | |
| int | vel_type, | |||
| int * | velocity, | |||
| int * | requested_vel, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, read_buffer(), result, and send_msg_frame().
| int DES_set_new_baud | ( | int * | port, | |
| int | baud, | |||
| char | flg | |||
| ) |
References BAUDRATE, bzero, DES_SPF_set_temp_param(), result, and ret.

| int DES_SF_set_current | ( | const int | port, | |
| int | newCurrent, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
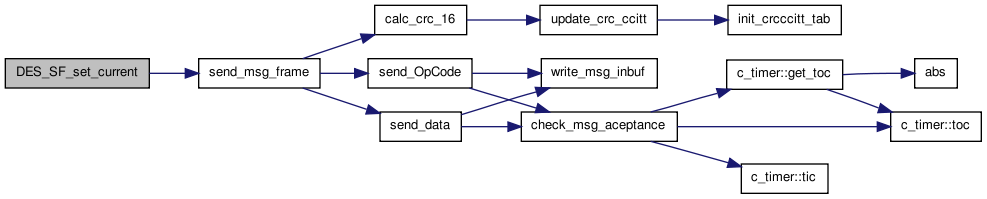
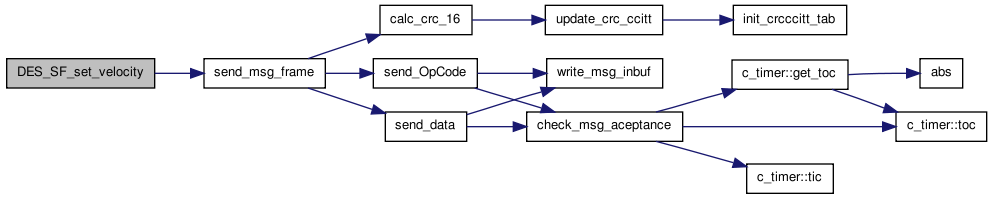
| int DES_SF_set_velocity | ( | const int | port, | |
| int | newVelocity, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
Referenced by stopDES().

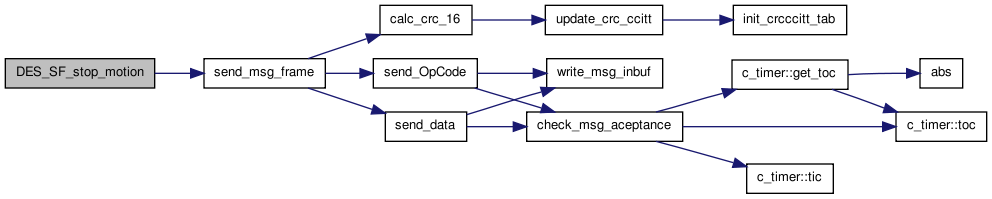
| int DES_SF_stop_motion | ( | const int | port, | |
| char | flg | |||
| ) |
This command changes the stopping state. if the motor is already stopped it will be released. Only available in speed regulation mode. SF is a setting function.
- Note:
- WARNING: This is a toggle function, so is required to verify if the brake is disable or not. check TYPE_DES_status_var::sys_op_status.bits.bb13
- Parameters:
-
port - serial port connection flg - (1) to print debug info
- Returns:
- (0) error occurs during sending
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
Referenced by InitDES(), and stopDES().
| int DES_SPF_read_all_temp_param | ( | const int | port, | |
| TYPE_des_sysparam * | sysparam, | |||
| char | flg | |||
| ) |
Read all temporary system parameters. DES answer the structure described by TYPE_des_sysparam. SPF is a System Parameter Functions.
- Parameters:
-
port - serial port device sysparam - struct with all des system parameters flg - if is required to print data
- Returns:
- (0) if error occurs when requesting data
References TYPE_des_sysparam::acceleration, TYPE_des_sysparam::ad_conv_offset, TYPE_des_sysparam::baudrate, TYPE_des_sysparam::can_bcr1, TYPE_des_sysparam::can_bcr2, TYPE_des_sysparam::can_config, TYPE_des_sysparam::can_module_id, TYPE_des_sysparam::can_op_mode, TYPE_des_sysparam::can_rtr0_id, TYPE_des_sysparam::can_rtr1_id, TYPE_des_sysparam::can_rx_pdo_id, TYPE_des_sysparam::can_rx_sdo_id, TYPE_des_sysparam::can_service_id, TYPE_des_sysparam::can_tx_pdo_id, TYPE_des_sysparam::can_tx_sdo_id, TYPE_des_sysparam::cur_det_ph_u_offset, TYPE_des_sysparam::cur_det_ph_v_offset, TYPE_des_sysparam::cur_reg_gain_p, TYPE_msg_frame::data, TYPE_des_sysparam::enc_resolution, TYPE_des_sysparam::error_proc, TYPE_des_sysparam::hall_angle_offs, TYPE_des_sysparam::index_offset, TYPE_des_sysparam::internal_param1, TYPE_des_sysparam::internal_param2, TYPE_des_sysparam::internal_param3, TYPE_des_sysparam::internal_param4, TYPE_des_sysparam::internal_param5, TYPE_des_sysparam::max_cont_current, TYPE_des_sysparam::max_cur_output, TYPE_des_sysparam::max_duty_cycle, TYPE_des_sysparam::max_speed, TYPE_des_sysparam::max_speed_curr, TYPE_des_sysparam::max_speed_error, TYPE_msg_frame::OpCode, TYPE_des_sysparam::peak_current, TYPE_des_sysparam::pole_pair_number, TYPE_des_sysparam::pwm_period, read_buffer(), result, TYPE_des_sysparam::rpm2qc_factor, send_msg_frame(), TYPE_des_sysparam::setting_unit_delay, TYPE_des_sysparam::setting_unit_gain, TYPE_des_sysparam::setting_unit_offset, TYPE_des_sysparam::speed_constant, TYPE_des_sysparam::speed_reg_gain_i, TYPE_des_sysparam::speed_reg_gain_p, and TYPE_des_sysparam::sys_config.
| int DES_SPF_read_temp_param | ( | const int | port, | |
| int | paramNb, | |||
| int | dataFormat, | |||
| int * | response, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, read_buffer(), result, and send_msg_frame().
Referenced by InitDES().

| int DES_SPF_set_temp_param | ( | const int | port, | |
| int | paramNb, | |||
| int | dataFormat, | |||
| int * | newValue, | |||
| char | flg | |||
| ) |
Write a new value to a temporary system parameter. Refer to the section about system parameters to find the desired system parameter numbers. SPF is a System Parameter Functions.
- Parameters:
-
port - serial device number paramNb - Parameter Number according table DES System Parameters and DES Status Variables. check TYPE_DES_sysparam and TYPE_DES_status_var dataFormat - (0)answer will be a WORD (1) answer will be a LWORD newValue - pointer to a WORD flg - (1) to print debug info
- Returns:
- (0) error occurs during sending
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
Referenced by DES_set_new_baud(), handler_speed_gain(), and InitDES().

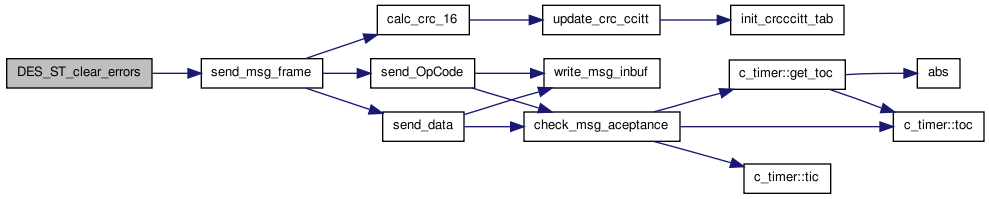
| int DES_ST_clear_errors | ( | const int | port, | |
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
Referenced by InitDES().

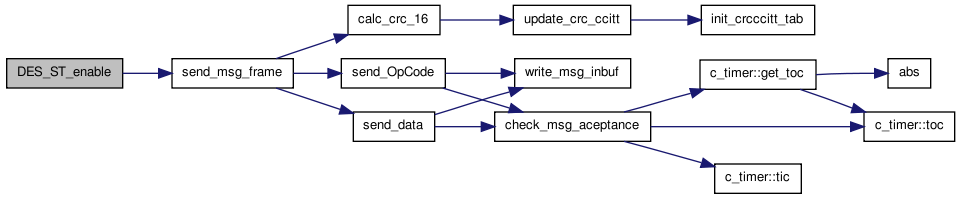
| int DES_ST_enable | ( | const int | port, | |
| int * | newState, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
Referenced by InitDES(), and stopDES().
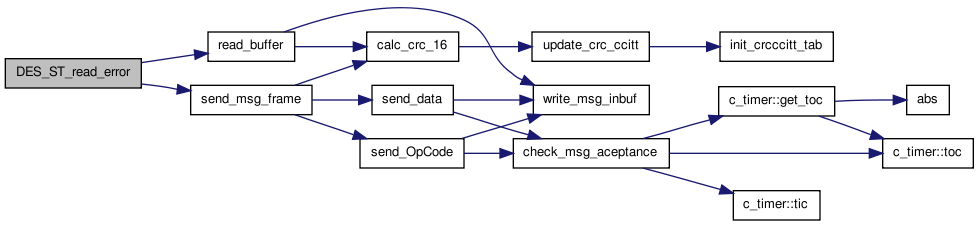
| int DES_ST_read_error | ( | const int | port, | |
| int * | errors, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, read_buffer(), result, send_msg_frame(), and TYPE_msg_frame::size.
Referenced by InitDES().

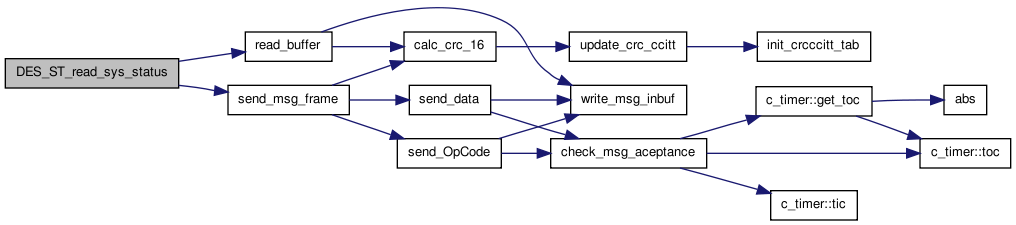
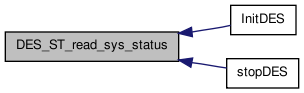
| int DES_ST_read_sys_status | ( | const int | port, | |
| int * | sys_status, | |||
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, read_buffer(), result, and send_msg_frame().
Referenced by InitDES(), and stopDES().
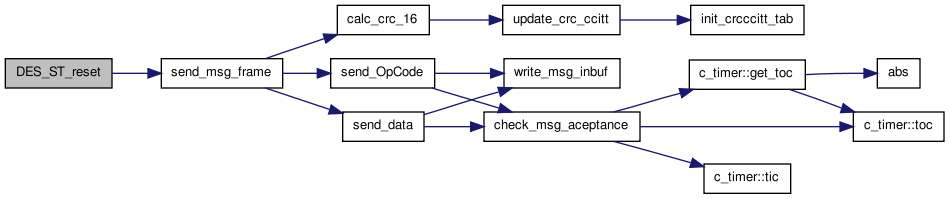
| int DES_ST_reset | ( | const int | port, | |
| char | flg | |||
| ) |
References TYPE_msg_frame::data, TYPE_msg_frame::OpCode, result, and send_msg_frame().
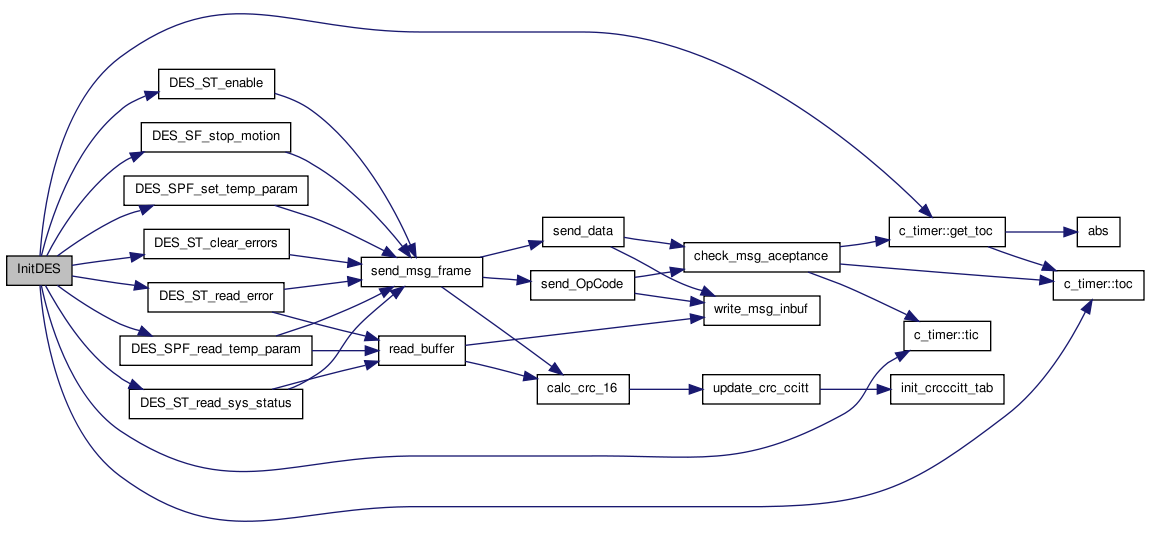
| int InitDES | ( | const int | port, | |
| TYPE_des_sysparam * | newSysParam, | |||
| char | flg | |||
| ) |
Function that initializes DES servoamplifier with a start configuration. also enables the servoamplifier to be used by software and garantees that the electric brake is not active.
- Parameters:
-
port - serial port conection newSysParam - DES start configuration, although there is 45 start configuration variable is just defined SYS_CONFIG, ENC_RESOLUTION, MAX_SPEED, MAX_CONT_CURRENT, PEAK_CURRENT, SPEED_REG_GAIN_P and SPEED_REG_GAIN_I flg - if is required to print out some infomration
- Returns:
- (-1) no errors, (0) brake not disabled or servoamplifier didn't not enabled, (1...) error according Standard Error Messages
References DES_SF_stop_motion(), DES_SPF_read_temp_param(), DES_SPF_set_temp_param(), DES_ST_clear_errors(), DES_ST_enable(), DES_ST_read_error(), DES_ST_read_sys_status(), TYPE_des_sysparam::enc_resolution, ENC_RESOLUTION, c_timer::get_toc(), TYPE_des_sysparam::max_cont_current, MAX_CONT_CURRENT, TYPE_des_sysparam::max_speed, MAX_SPEED, TYPE_des_sysparam::peak_current, PEAK_CURRENT, result, TYPE_des_sysparam::speed_reg_gain_i, SPEED_REG_GAIN_I, TYPE_des_sysparam::speed_reg_gain_p, SPEED_REG_GAIN_P, TYPE_des_sysparam::sys_config, SYS_CONFIG, TYPE_DES_status_var::sys_op_status, c_timer::tic(), and c_timer::toc().
| int InitDES_communication | ( | char * | com_device, | |
| int * | port, | |||
| int | baud, | |||
| TYPE_executionflags * | flg | |||
| ) |
References bzero, TYPE_executionflags::dummy, result, and ret.
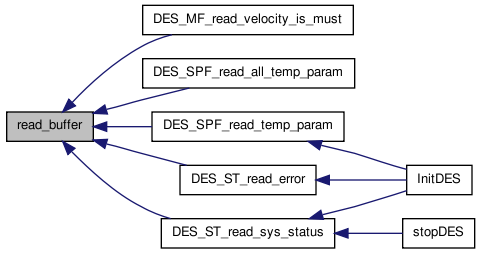
| int read_buffer | ( | const int | port, | |
| TYPE_msg_frame * | msg, | |||
| char | flg | |||
| ) |
References calc_crc_16(), TYPE_msg_frame::crc, TYPE_msg_frame::data, i, n, TYPE_msg_frame::OpCode, result, TYPE_msg_frame::size, tmp, and write_msg_inbuf().
Referenced by DES_MF_read_velocity_is_must(), DES_SPF_read_all_temp_param(), DES_SPF_read_temp_param(), DES_ST_read_error(), and DES_ST_read_sys_status().

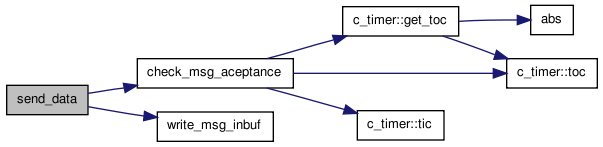
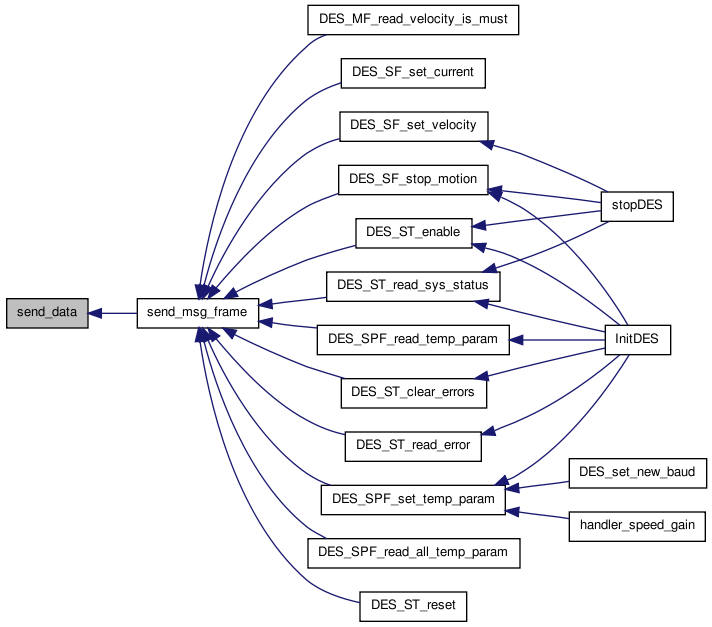
| int send_data | ( | const int | port, | |
| TYPE_msg_frame * | msg, | |||
| char | flg | |||
| ) |
References check_msg_aceptance(), TYPE_msg_frame::crc, TYPE_msg_frame::data, err, result, TYPE_msg_frame::size, tmp, WAIT, and write_msg_inbuf().
Referenced by send_msg_frame().
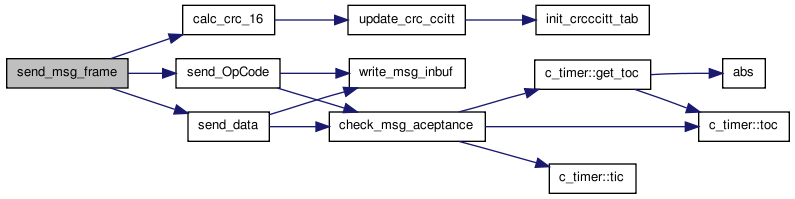
| int send_msg_frame | ( | const int | port, | |
| TYPE_msg_frame * | msg, | |||
| char | flg | |||
| ) |
References calc_crc_16(), TYPE_msg_frame::OpCode, result, send_data(), and send_OpCode().
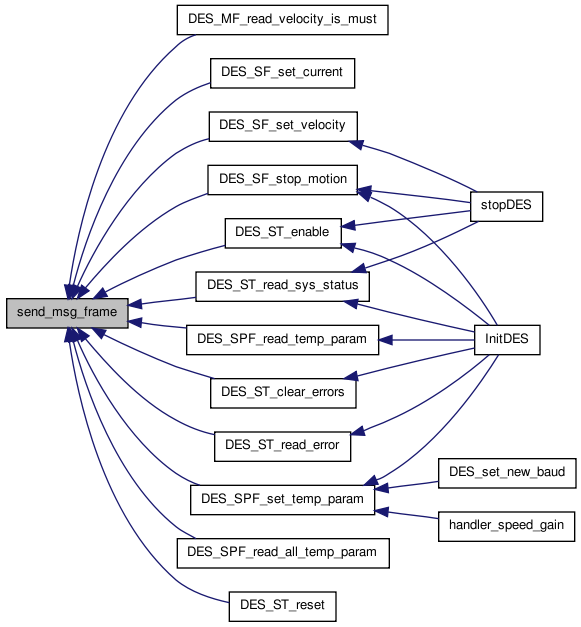
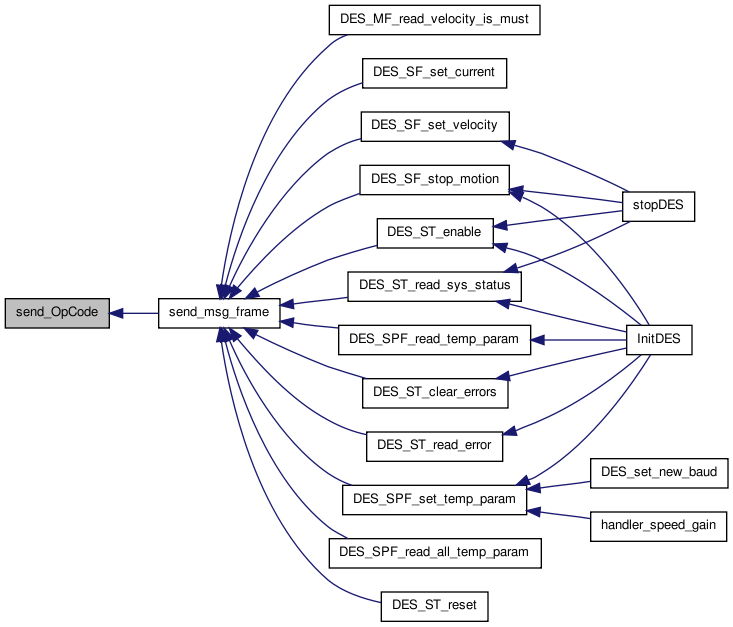
Referenced by DES_MF_read_velocity_is_must(), DES_SF_set_current(), DES_SF_set_velocity(), DES_SF_stop_motion(), DES_SPF_read_all_temp_param(), DES_SPF_read_temp_param(), DES_SPF_set_temp_param(), DES_ST_clear_errors(), DES_ST_enable(), DES_ST_read_error(), DES_ST_read_sys_status(), and DES_ST_reset().
| int send_OpCode | ( | const int | port, | |
| unsigned char | tries, | |||
| unsigned char | OpCode, | |||
| char | flg | |||
| ) |
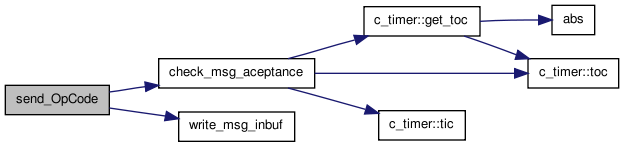
References check_msg_aceptance(), err, result, tmp, WAIT, and write_msg_inbuf().
Referenced by send_msg_frame().
| int stopDES | ( | const int | port, | |
| char | flg | |||
| ) |
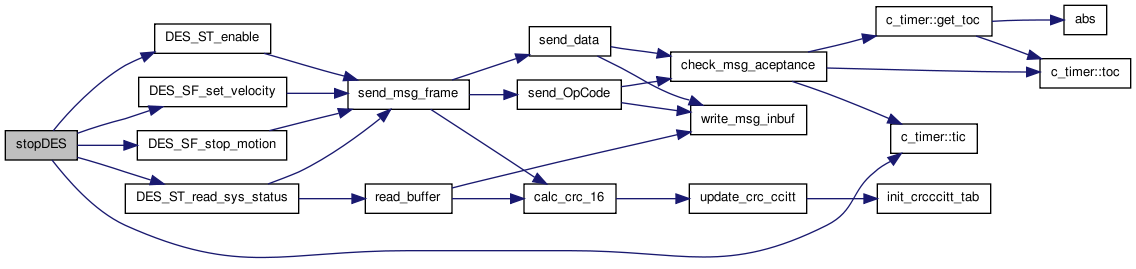
References DES_SF_set_velocity(), DES_SF_stop_motion(), DES_ST_enable(), DES_ST_read_sys_status(), result, TYPE_DES_status_var::sys_op_status, and c_timer::tic().
| int write_msg_inbuf | ( | const int | port, | |
| unsigned char * | data, | |||
| int | size | |||
| ) |
send to serial port a stream of bytes
- Parameters:
-
port - device port data - vector with streaming of data size - number of bytes to be sent
- Returns:
- this function will returns 0 if error occurs
Referenced by read_buffer(), send_data(), and send_OpCode().