The “Festival International des Sciences et Technologies”, which has been taking place since the second half of the 90’s, among other activities, has counted with the presence of several hexapod robots. The edition of May 1998 in Bourges, France, where the University of Aveiro appeared in competition with another type of robot, has shown an impressive hexapod robot from the IUT of Nantes. When compared to most of the other hexapods shown, the Nantes’ device had the peculiarity of having large dimensions, therefore posing more interesting engineering problems than the handheld or table-oriented smaller fellow robots presented. Exception was made to a heavy hydraulic hexapod much more complex than all the others. Apart from this hydraulic hexapod, all the remainder are conceptually simple, since they use two degrees of freedom, at most. That suggested the idea of proposing such a project for a Mechanical Engineering final year main activity, at the University of Aveiro. Such project would involve mechanics, electronics and programming, defining a very interesting challenge for graduating students in engineering.
Podibot
spider
hydraulic
IUT of Nantes
The First Developments
After October 1999 began a project for two final year graduation students (Pedro Viana & Maria João) at the Mechanical Engineering department. The idea was to conceive and build from scratch a hexapod robot with only two degrees of freedom. The main design issues were:
simple locomotion and control;
size adequate to traverse the labs at circa 0.5 m/s.
The phases of the work included:
Design of the locomotion system
Software simulation of the kinematics structure
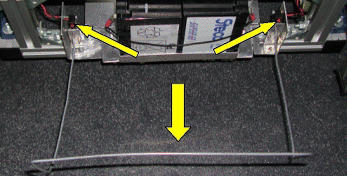
Solutions and parameters for mechanical structure to hold the robot
Programming the control unit
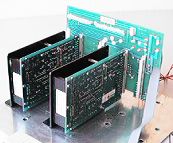
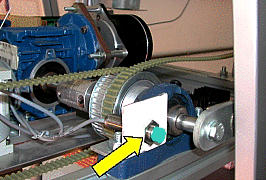
Essays with some existing parts available in stock
The results at the end of the project schedule were a demonstration of the validity of the locomotion principle, but some older components available in stock, such as used motors and power drives, were not suited to push the robot. New components had to be ordered to permit actual robot locomotion.
Leg
Hexapod
The Second Development Stage
With more resources allocated for component acquisition, the project continued in 2000/2001 by the hand of one student (Rui Mendes). New motors had to be purchased along with some additional electrical and mechanical components.
A full, more thorough study of the system dynamics had to be done taking into account a continuous trajectory for the leg locomotion to avoid violent impact on the floor. The study was based on the Lagrangean (theoretical kinematics and potential energy) of a simplified model assuming that the robot remained continuously horizontal.
where:
where:
Model of leg on the floor
Main equations for the point P0 where all mass is assumed to be concentrated
Real robot weight and other physical factors (losses by friction, etc.) were now estimated and also taken into account. Consequently, adequate motors and power drives were selected and installed. Using previous (and other auxiliary) equations the following graphs could be plotted.
Angular of one leg's actuator
Resulting torque at the leg's actuator
Predicted power cycle involved with each motor
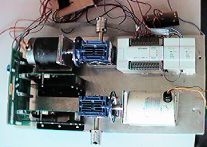
Installed motors and power units were the following:
Programming the control unit was the following phase, and the robot made its first public presentation as a demo at the 2001 edition of the MicroRato contest at the University of Aveiro.
Public appearance at the 2001 MicroRato edition by the student Rui Mendes (on the Right) and his supervisor Vitor Santos.
Linear locomotion was now possible and a rotation ability has also been included. However, that capability required special maneuvers for which synchronization matters could also be taken into account. A simple bumper enabled the system to detect collisions and then take appropriate measures. Also a remote command box for manual operation was installed.
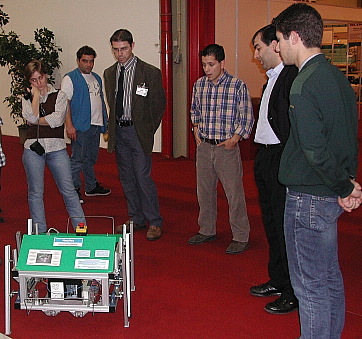
With some refinements of the program code and a few minor mechanical adjustments, carried out by two students (Pedro Maia & Rui Ferreira) in October 2001 , the robot was appreciated in its second public appearance at the “1ª Feira de Ciência, Tecnologia e Inovação” that took place at the Exponor, Porto, Portugal, 7-10 November 2001.
Presence at the 1st Fair of Science, Technology and Innovation, Porto, Nov. 2001
The Third Stage
After having shown the ability to move, the next step would be refining the locomotion system and add perception capabilities to the robot. Keeping the 2-DOF limitations, an alternative locomotion system was studied and some conclusions have been drawn. Also, additional sensors and computational power should be added to obtain a more versatile system. Two final year graduation students (Pedro Maia & Rui Ferreira) pushed the system in several directions and have shown the versatility of the base platform for other locomotion principles.
During this phase enhanced control and perception capabilities were tried and added to the hexapod robot.