Framework project that covers several sub-projects being developed since 1999 and related to mobile robot navigation where a commercial platform has been enhanced and customized for advanced capabilities.
The Goal
The main goal concerning the overall project is to develop hardware and software tools for autonomous navigation of a mobile robot for indoors but also outdoors environments.
The tools rely both on sensors already aboard the original robot, and also some added a posteriori. Additionally, other hardware modifications have been taking place in order to enable the original robot to perform in more environments and in a more versatile way.
It can be said that the ultimate goal, using this global set of hardware, is to study and develop a high level interface, mainly intended for humans, to easily specify navigation missions without metric or precise knowledge of the environment; eventually, topological and qualitative information should be the sole requirements to define missions.
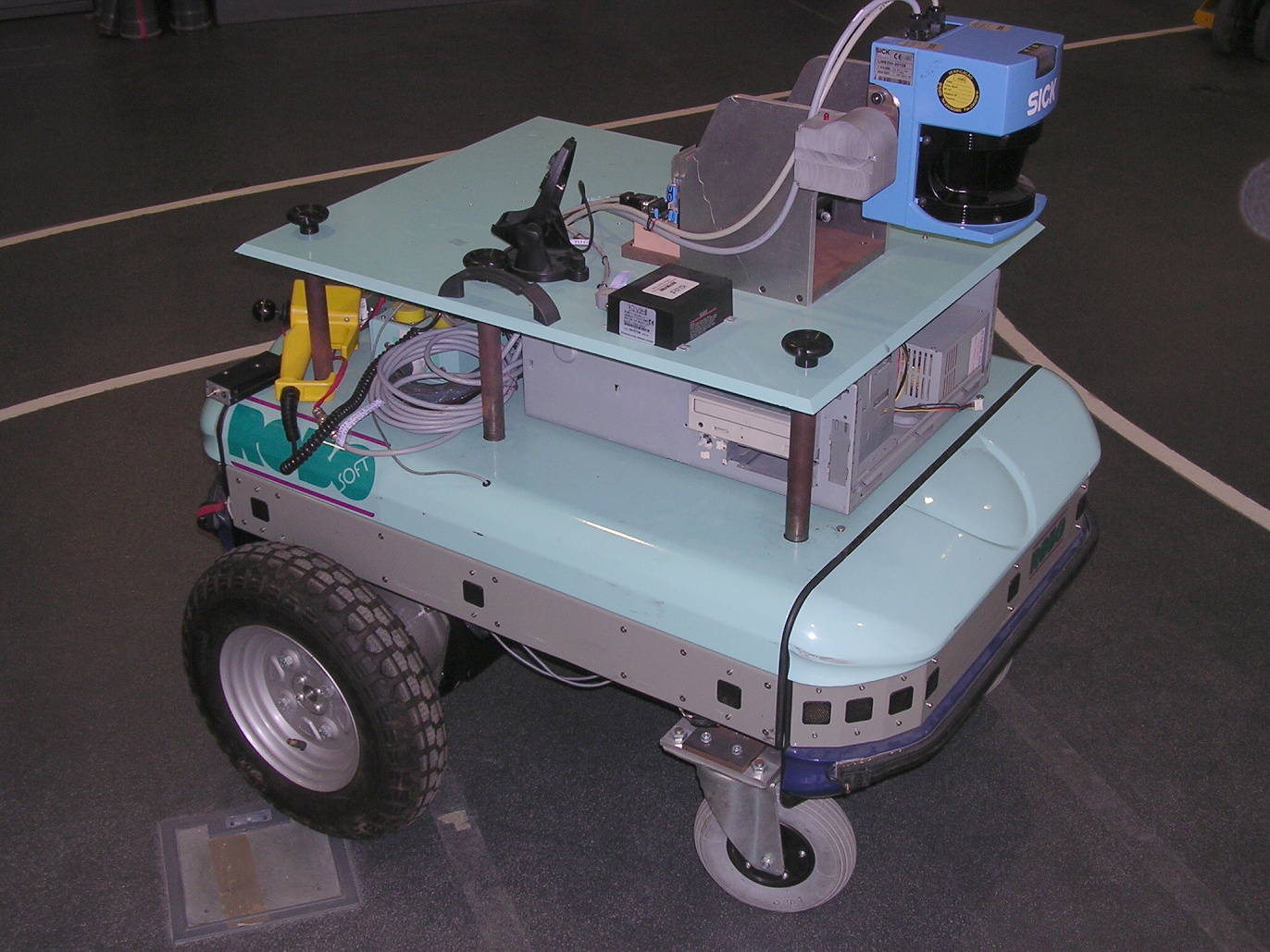
The Mobile Platform
click here
The original platform
24 sonars
2 encoders on motorized wheels
Operating system with low level motion commands
8 serials ports for external connectivity
Modified robuter platform
Additional on-board PC for versatile interface
Gyroscope (FOG) to overcome some odometry limitations
Laser range finder for finer spatial measurements
Wheel modifications for outdoors mobility
Firewire video camera for additional peception facilities
3D scanning unit for more complex environment modeling
GPS receiver for outdoors global navigation
Developed software (kernel and modules) for enhanced interfacing and navigation tasks running above the native real-time operating system (Albatros).
List of sub-projects already carried out and their main topics
Integrated Navigation System for Robust Navigation of a Mobile Robot (1999-2000)
Integration of gyroscope for navigation and its combination with odometry
Automatic door crossing using 2D laser profiles
Mission based navigation software - the Language for Autonomous Mission Planning (LAMP)
Mobile Robot Localization using Laser Range Patterns (2001-2002)
Extraction of particular laser patterns in elsewhere poorly structured environment for relative localization
Integration of pattern-based localization in more general navigation missions
Navigation Tools to implement Flexible AGV's (2002-2003)
Laser scanner integration in Linux environments for fast scanning and data transfer
Navigation system integrating sonar and laser using partial environment models via EKF
Automatic detection of multiple doors in the enviroment after 2D laser range profiles
3D laser scanning based on 2D common laser (2003)
Development of a dedicated tilt unit and its interface with a remote host
3D Reconstruction of environments based on successive 2D laser scans
Outdoors navigation system based on repeating models extracted from laser range (2002-2004...)
Hardware modifications of the robuter base platform for outdoors navigation.
Efficient extraction of specific features such as round and rectangular pillars in environment for automatic relative localization and autonomous navigation.
Autonomous Navigation and Real-time Localization for a Mobile Robot using Multi-sensorial perception (2002-2008)
Scale-space image analysis for invariant extraction and subsequent scene and object recognition
Special topological maps for automatic navigation
Integration of control laws, perception and mission description
Development of high level interface for autonomous mission planning - extending LAMP.
Staff involved in the projects between 1999 and 2008
Vitor M. F. Santos, PhD, Associate Professor, Project Coordination.
Emanuel Oliveira, (1999-2000), Post-graduation student, Fellowship for research initiation.
Caetano Filipe Ferreira, MEng, (2001-2008), PhD Student.
Oliveira, E., Santos, V. 2000 - Giroscópios Ópticos: Princípios de Funcionamento e Especificações, Robótica, Num. 40/41, pp. 43-50. (ISSN: 0874-9019)
Santos , V., Castro, J., Ribeiro, M. I. 2000 - A Nested-Loop Architecture for Mobile Robot Navigation, International Journal of Robotics Research, 19(12):1218-1235.
Oliveira, E., Santos, V. 2000 – Fiber Optics Gyroscopes Evaluation and Calibration with a Mobile Robot, Proc. of the 8th International Symposium on Intelligent Robotic Systems, SIRS2000, University of Reading, United Kingdom, July 2000, pp. 281-286.
Santos, V., Oliveira, E. 2001 –Missões de Navegação para um robot Móvel baseadas em Tarefas e Relações Topológicas do Ambiente, Robótica, Num. 45, pp. 14-22. (ISSN: 0874-9019)
Ferreira, C. F. , 2002 - Mobile Robot Localisation using Laser Range Patterns, Master Thesis in Mechanical Engineering, Universidade de Aveiro, Portugal.
Xiang, Z., Santos, V., Liu, J., 2003 – Robust Mobile Robot Localization by fusing Laser and Sonar, International Conference on Advanced Robotics, ICAR2003, Coimbra Portugal, 30 Jun - 3 Jul 2003, pp.276-280
Ferreira, C., Santos, V. 2003 – Mobile Robot Localization using Laser Ranging and a Multi-component Landmark, International Conference on Advanced Robotics, ICAR2003, Coimbra, Portugal, 30 Jun-3 Jul 2003, pp.142-147.
Ferreira, C. F., Dias. J., Santos, V. 2004 - Convergence of Methods for Multi-Scale Image Analysis for Object and Image Recollection, The 8 th Intelligent Autonomous Systems Conference, IAS2004, Amsterdam, The Netherlands, 10-13 Mar 2004.
Ferreira, C. F., Dias. J., Santos, V. 2004 - Landmark Detection for Vision-based Navigation using Multi-Scale Image Techniques", World Automation Congress - 10th International Symposium on Robotics and Applications, ISORA2004, Seville, Spain, 28 Jun - 1 Jul 2004.
Xiang, Z., Santos, V., Liu, J., 2004 – Locating and Crossing Doors and Narrow Passages for a Mobile Robot – Int. Conference on Informatics in Control, Automation and Robotics, ICINCO 2004, pp. 370-374, 28-28 Aug 2004, Setúbal, Portugal.
Dias, P. , Matos, M., V. Santos, V., 2004- 3D Reconstruction of Real World Scenes Using a low-cost 3D range scanner, 4th International Conference on Construction Applications of Virtual Reality - CONVR2004