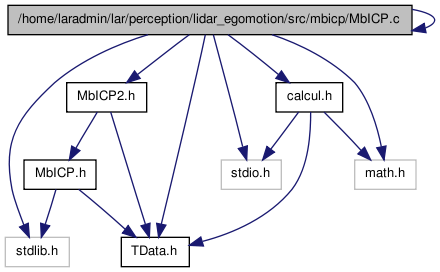
/home/laradmin/lar/perception/lidar_egomotion/src/mbicp/MbICP.c File Reference
MbICP scan matcher main implementation code.
More...
#include "MbICP.h"
#include "TData.h"
#include <stdlib.h>
#include "MbICP2.h"
#include "calcul.h"
#include <stdio.h>
#include <math.h>
Go to the source code of this file.
Defines |
| #define | BIG_INITIAL_ERROR 1000000.0F |
| #define | M_PI 3.14159265358979323846 |
Functions |
| static int | computeMatrixLMSOpt (TAsoc *cp_ass, int cnt, Tsc *estimacion) |
| static int | EStep () |
| void | Init_MbICP_ScanMatching (float max_laser_range, float Bw, float Br, float L, int laserStep, float MaxDistInter, float filter, int ProjectionFilter, float AsocError, int MaxIter, float error_ratio, float error_x, float error_y, float error_t, int IterSmoothConv) |
| int | MbICPmatcher (Tpfp *laserK, Tpfp *laserK1, Tsc *sensorMotion, Tsc *solution) |
| static int | MStep (Tsc *solucion) |
| static void | preProcessingLib (Tpfp *laserK, Tpfp *laserK1, Tsc *initialMotion) |
Variables |
| int | cntAssociationsT |
| int | cntAssociationsTemp |
| TAsoc | cp_associations [MAXLASERPOINTS] |
| TAsoc | cp_associationsTemp [MAXLASERPOINTS] |
| static float | distref [MAXLASERPOINTS] |
| static float | error_k1 |
| float | MAXLASERRANGE |
| Tsc | motion2 |
| static int | numConverged |
| TSMparams | params |
| Tscan | ptosNew |
| Tscan | ptosNoView |
| Tscan | ptosRef |
| static float | refdqx [MAXLASERPOINTS] |
| static float | refdqx2 [MAXLASERPOINTS] |
| static float | refdqxdqy [MAXLASERPOINTS] |
| static float | refdqy [MAXLASERPOINTS] |
| static float | refdqy2 [MAXLASERPOINTS] |
Detailed Description
MbICP scan matcher main implementation code.
Definition in file MbICP.c.
Define Documentation
| #define BIG_INITIAL_ERROR 1000000.0F |
| #define M_PI 3.14159265358979323846 |
Function Documentation
| static int computeMatrixLMSOpt |
( |
TAsoc * |
cp_ass, |
|
|
int |
cnt, |
|
|
Tsc * |
estimacion | |
|
) |
| | [static] |
| static int EStep |
( |
|
) |
[static] |
| void Init_MbICP_ScanMatching |
( |
float |
max_laser_range, |
|
|
float |
Bw, |
|
|
float |
Br, |
|
|
float |
L, |
|
|
int |
laserStep, |
|
|
float |
MaxDistInter, |
|
|
float |
filter, |
|
|
int |
ProjectionFilter, |
|
|
float |
AsocError, |
|
|
int |
MaxIter, |
|
|
float |
error_ratio, |
|
|
float |
error_x, |
|
|
float |
error_y, |
|
|
float |
error_t, |
|
|
int |
IterSmoothConv | |
|
) |
| | |
| int MbICPmatcher |
( |
Tpfp * |
laserK, |
|
|
Tpfp * |
laserK1, |
|
|
Tsc * |
sensorMotion, |
|
|
Tsc * |
solution | |
|
) |
| | |
| static int MStep |
( |
Tsc * |
solucion |
) |
[static] |
| static void preProcessingLib |
( |
Tpfp * |
laserK, |
|
|
Tpfp * |
laserK1, |
|
|
Tsc * |
initialMotion | |
|
) |
| | [static] |
Variable Documentation
float distref[MAXLASERPOINTS] [static] |
float refdqx[MAXLASERPOINTS] [static] |
float refdqx2[MAXLASERPOINTS] [static] |
float refdqy[MAXLASERPOINTS] [static] |
float refdqy2[MAXLASERPOINTS] [static] |