laser3d.h File Reference
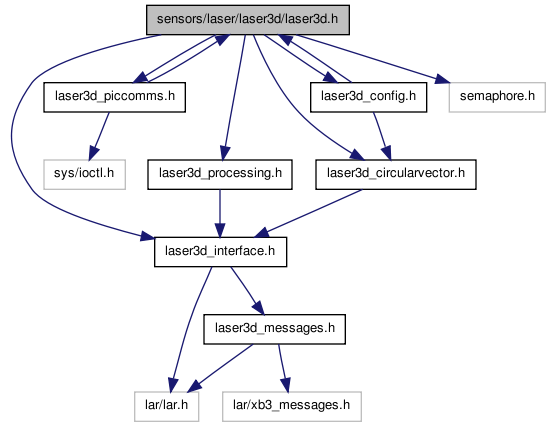
#include "laser3d_interface.h"#include "laser3d_piccomms.h"#include "laser3d_processing.h"#include "laser3d_circularvector.h"#include "laser3d_config.h"#include <semaphore.h>
Include dependency graph for laser3d.h:
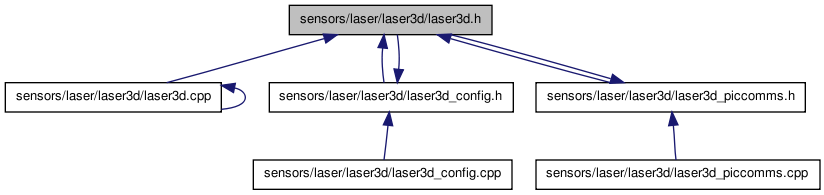
This graph shows which files directly or indirectly include this file:
Defines | |
| #define | textRESET 0 |
| #define | textBRIGHT 1 |
| #define | textDIM 2 |
| #define | textUNDERLINE 4 |
| #define | textBLINK 4 |
| #define | textREVERSE 7 |
| #define | textHIDDEN 8 |
| #define | textSTRIKETHROUGH 9 |
| #define | textBLACK 0 |
| #define | textRED 1 |
| #define | textGREEN 2 |
| #define | textYELLOW 3 |
| #define | textBLUE 4 |
| #define | textMAGENTA 5 |
| #define | textCYAN 6 |
| #define | textGREY 7 |
| #define | textWHITE 8 |
Variables | |
| const int | n_PIC_readings = 20 |
| sem_t | read_serial_semaphore |
| sem_t | read_num_semaphore |
| pthread_mutex_t | read_serial_mutex |
| double | PIC_encoder_num |
| TYPE_laser3d_pointcloud_message | laser3d |
| TYPE_laser3d_pointcloud_message | laser3d_to_IPC |
| TYPE_xbcameratmatrix_params | tp |
| TYPE_laser3d_params | laser3d_params |
| TYPE_3d_field_of_perception | fp |
| TYPE_sensor_field_of_perception | lp |
| TYPE_carmen_laser3d_sensordata_message_test | laser3d_test |
| double | PIC_timestamp [n_PIC_readings] |
| double | PIC_encoder_num_circ [n_PIC_readings] |
| int | thread_must_stop |
| int | thread_has_stopped |
| int | rpm |
| TYPE_executionflags | flags |
| Include the interface. | |
