TYPE_RobotStatus Struct Reference
[Context Manager demo, Context Manager]
#include <cm_types.h>
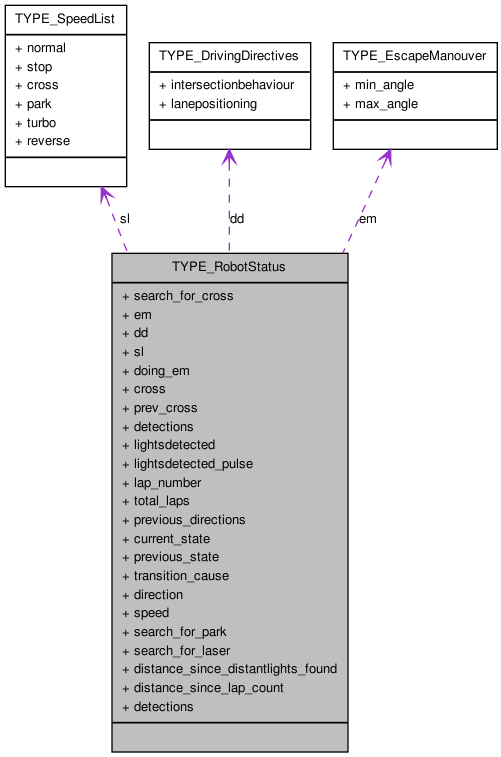
Collaboration diagram for TYPE_RobotStatus:
Data Fields | |
| char | search_for_cross |
| TYPE_EscapeManouver | em |
| TYPE_DrivingDirectives | dd |
| TYPE_SpeedList | sl |
| char | doing_em |
| struct { | |
| char cross | |
| char TYPE_RobotStatus::prev_cross | |
| } | detections |
| char | lightsdetected |
| char | lightsdetected_pulse |
| unsigned int | lap_number |
| unsigned int | total_laps |
| double | previous_directions [10] |
| TYPE_States | current_state |
| TYPE_States | previous_state |
| char | transition_cause [1024] |
| double | direction |
| int | speed |
| int | search_for_park |
| int | search_for_laser |
| double | distance_since_distantlights_found |
| double | distance_since_lap_count |
| struct { | |
| char cross | |
| char TYPE_RobotStatus::prev_cross | |
| } | detections |
Field Documentation
Referenced by cross_computation(), and main().
Referenced by set_search_for_cross().
The documentation for this struct was generated from the following files:
- demos/cm_demo/cm_demo_types.h
- planning/cm/cm_types.h
