Base_ptucontrol
[Ptucontrol]
This module handles rs232 low level communication with the PTU. More...

|
Data Structures | |
| class | cPTU_Base |
| class | cPTU_Control |
| Driver for Directed Perception Pan and Tilt units (PTU), model PTUD46. More... | |
Files | |
| file | ptu_control.h |
header file | |
Defines | |
| #define | FORPTUTOSTOP -1 |
| Standart include. kde project default includes. | |
| #define | _PANTILTRESOLUTION_ 0.0514285 |
| Value used to convert degrees to pulses for the functions PanToAngle(double Angle) TiltToAngle(double Angle) and PanTiltAngleSpeed(double PanAngle, double TiltAngle, unsigned short int PanSpeed,unsigned short int TiltSpeed). | |
|
| |
| #define | DEBUG 0 |
| #define | FALSE 0 |
| #define | INT_REVERSED |
|
| |
| #define | SERIAL_CODE_VERSION "LINUX v1.0d" |
| #define | PORT_NOT_OPENED -1 |
| #define | TRUE 1 |
| #define | FALSE 0 |
| #define | AWAIT_CHARSTREAM -1 |
| #define | TIMEOUT_CHAR_READ -1 |
| portstream_fd | openserial (char *portname) |
| char | closeserial (portstream_fd) |
| char | SerialBytesOut (portstream_fd, unsigned char *, int) |
| char | SerialBytesIn (portstream_fd, unsigned char *, unsigned int, long) |
| char | PeekByte (portstream_fd, unsigned char *) |
| char | FlushInputBuffer (portstream_fd) |
| void | do_delay (long) |
| char | SerialStringOut (portstream_fd, unsigned char *) |
| char | ReadSerialLine (portstream_fd, unsigned char *, long, int *) |
| char | GetSignedShort (portstream_fd, signed short *, long) |
| char | PutSignedShort (portstream_fd, signed short *) |
| char | GetUnsignedShort (portstream_fd, unsigned short *, long) |
| char | PutUnsignedShort (portstream_fd, unsigned short *) |
| char | GetSignedLong (portstream_fd, signed long *, long) |
| char | PutSignedLong (portstream_fd, signed long *) |
| typedef int | portstream_fd |
|
| |
| #define | OPCODE_VERSION "v1.09.12" |
| #define | ASYNCHRONOUS_EVENT(char_val) ( (char_val >= 220) && (char_val < 240) ) |
| #define | PAN_LIMIT_HIT 220 |
| #define | TILT_LIMIT_HIT 221 |
| #define | CABLE_DISCONNECT_DETECTED 222 |
| #define | PAN_POSITION_TRIGGER_HIT 223 |
| #define | TILT_POSITION_TRIGGER_HIT 224 |
| #define | PAN_SPEED_TRIGGER_HIT 225 |
| #define | TILT_SPEED_TRIGGER_HIT 226 |
| #define | PTU_HI_POWER 1 |
| #define | PTU_REG_POWER 2 |
| #define | PTU_LOW_POWER 3 |
| #define | PTU_OFF_POWER 4 |
| #define | PTU_INDEPENDENT_SPEED_CONTROL_MODE 1 |
| #define | PTU_PURE_VELOCITY_SPEED_CONTROL_MODE 2 |
| #define | PTU_OK 0 |
| #define | PTU_ILLEGAL_COMMAND 2 |
| #define | PTU_ILLEGAL_POSITION_ARGUMENT 3 |
| #define | PTU_ILLEGAL_SPEED_ARGUMENT 4 |
| #define | PTU_ACCEL_TABLE_EXCEEDED 5 |
| #define | PTU_DEFAULTS_EEPROM_FAULT 6 |
| #define | PTU_SAVED_DEFAULTS_CORRUPTED 7 |
| #define | PTU_LIMIT_HIT 8 |
| #define | PTU_CABLE_DISCONNECTED 9 |
| #define | PTU_ILLEGAL_UNIT_ID 10 |
| #define | PTU_ILLEGAL_POWER_MODE 11 |
| #define | PTU_RESET_FAILED 12 |
| #define | PTU_ILLEGAL_PARAMETERS 13 |
| #define | PTU_DUART_ERROR 14 |
| #define | GCU_ERROR 15 |
| #define | PTU_ERROR 16 |
| #define | NOT_SUPPORTED_BY_THIS_FIRMWARE_VERSION 17 |
| #define | PTU_TILT_VANE_OUT_OF_RANGE_ERROR 19 |
| #define | CHECKSUM_ERROR 20 |
| #define | INTERACTIVE_MAIN_MENU 1 |
| #define | DISPLAY_PAN_MOTOR_COMMANDS 2 |
| #define | DISPLAY_TILT_MOTOR_COMMANDS 3 |
| #define | DISPLAY_MENU_OPTIONS 4 |
| #define | ILLEGAL_COMMAND_WITH_DELIMITER 5 |
| #define | ASCII_COMMAND_WITH_NO_BINARY_EQUIV 6 |
| #define | ILLEGAL_OPCODE 7 |
| #define | ILLEGAL_ARGUMENT 8 |
| #define | OPCODE_BASE 129 |
| #define | MAX_OPCODE 235 |
| #define | NUM_OPCODES (MAX_OPCODE - OPCODE_BASE + 1) |
| #define | PAN_SET_ABS_POS 129 |
| #define | TILT_SET_ABS_POS 130 |
| #define | PAN_SET_REL_POS 131 |
| #define | TILT_SET_REL_POS 132 |
| #define | PAN_TILT_SET_ABS_POS 240 |
| #define | PAN_TILT_GET_ABS_POS 241 |
| #define | PAN_SET_REL_SPEED 133 |
| #define | TILT_SET_REL_SPEED 134 |
| #define | PAN_SET_ABS_SPEED 135 |
| #define | TILT_SET_ABS_SPEED 136 |
| #define | LAST_SIGNED_2BYTE_INT_OPCODE 136 |
| #define | PAN_SET_BASE_SPEED 137 |
| #define | TILT_SET_BASE_SPEED 138 |
| #define | PAN_SET_UPPER_SPEED_LIMIT 139 |
| #define | TILT_SET_UPPER_SPEED_LIMIT 140 |
| #define | PAN_SET_LOWER_SPEED_LIMIT 141 |
| #define | TILT_SET_LOWER_SPEED_LIMIT 142 |
| #define | SET_UNIT_ID 143 |
| #define | SELECT_UNIT_ID 144 |
| #define | LAST_2BYTE_INT_OPCODE 144 |
| #define | PAN_CURRENT_POS_QUERY 145 |
| #define | TILT_CURRENT_POS_QUERY 146 |
| #define | PAN_DESIRED_POS_QUERY 147 |
| #define | TILT_DESIRED_POS_QUERY 148 |
| #define | PAN_MIN_POSITION_QUERY 149 |
| #define | TILT_MIN_POSITION_QUERY 150 |
| #define | PAN_MAX_POSITION_QUERY 151 |
| #define | TILT_MAX_POSITION_QUERY 152 |
| #define | PAN_CURRENT_SPEED_QUERY 153 |
| #define | TILT_CURRENT_SPEED_QUERY 154 |
| #define | PAN_DESIRED_SPEED_QUERY 155 |
| #define | TILT_DESIRED_SPEED_QUERY 156 |
| #define | PAN_BASE_SPEED_QUERY 157 |
| #define | TILT_BASE_SPEED_QUERY 158 |
| #define | PAN_UPPER_SPEED_LIMIT_QUERY 159 |
| #define | TILT_UPPER_SPEED_LIMIT_QUERY 160 |
| #define | PAN_LOWER_SPEED_LIMIT_QUERY 161 |
| #define | TILT_LOWER_SPEED_LIMIT_QUERY 162 |
| #define | PAN_ACCEL_QUERY 163 |
| #define | TILT_ACCEL_QUERY 164 |
| #define | PAN_RESOLUTION_QUERY 165 |
| #define | TILT_RESOLUTION_QUERY 166 |
| #define | AWAIT_COMMAND_COMPLETION 167 |
| #define | HALT 168 |
| #define | HALT_PAN 169 |
| #define | HALT_TILT 170 |
| #define | POSITION_LIMITS_QUERY 171 |
| #define | ENABLE_POSITION_LIMITS 172 |
| #define | DISABLE_POSITION_LIMITS 173 |
| #define | SET_IMMEDIATE_COMMAND_MODE 174 |
| #define | SET_SLAVED_COMMAND_MODE 175 |
| #define | UNIT_RESET 176 |
| #define | UNIT_RESET_ON_POWERUP 177 |
| #define | UNIT_RESET_ON_POWERUP_DISABLED 178 |
| #define | UNIT_ID_QUERY 179 |
| #define | ECHO_QUERY 180 |
| #define | ENABLE_ECHO 181 |
| #define | DISABLE_ECHO 182 |
| #define | SAVE_DEFAULTS 183 |
| #define | RESTORE_SAVED_DEFAULTS 184 |
| #define | RESTORE_FACTORY_DEFAULTS 185 |
| #define | PAN_HOLD_POWER_QUERY 186 |
| #define | TILT_HOLD_POWER_QUERY 187 |
| #define | PAN_MOVE_POWER_QUERY 188 |
| #define | TILT_MOVE_POWER_QUERY 189 |
| #define | VERBOSE_QUERY 190 |
| #define | SET_VERBOSE_ASCII_ON 191 |
| #define | SET_VERBOSE_ASCII_OFF 192 |
| #define | JOYSTICK_QUERY 193 |
| #define | ENABLE_JOYSTICK 194 |
| #define | DISABLE_JOYSTICK 195 |
| #define | FIRMWARE_VERSION_QUERY 196 |
| #define | LAST_0ARG_OPCODE 196 |
| #define | PAN_SET_HOLD_POWER 197 |
| #define | TILT_SET_HOLD_POWER 198 |
| #define | PAN_SET_MOVE_POWER 199 |
| #define | TILT_SET_MOVE_POWER 200 |
| #define | LAST_1BYTE_ARG_OPCODE 200 |
| #define | PAN_SET_ACCEL 201 |
| #define | TILT_SET_ACCEL 202 |
| #define | LAST_4BYTE_ARG_OPCODE 202 |
| #define | SPECIAL_OPCODE 203 |
| #define | QUERY_SPEED_CONTROL_MODE 203 |
| #define | SET_INDEPENDENT_CONTROL_MODE 204 |
| #define | SET_PURE_VELOCITY_CONTROL_MODE 205 |
| #define | UNIT_RESET_PAN 220 |
| #define | UNIT_RESET_TILT 221 |
| #define | SET_DESIRED_PTU_MOTION 222 |
| #define | QUERY_CURRENT_PTU_MOTION 223 |
| #define | OUTSIDE_ENVIRONMENT_QUERY 224 |
| #define | PRESET_SET 225 |
| #define | PRESET_GOTO 226 |
| #define | PRESET_CLEAR 227 |
| #define | TTL_CONTROLS 228 |
| #define | TRIGGER_CONTROLS 229 |
| #define | TRIGGER_OP_on 01 |
| #define | TRIGGER_OP_off 02 |
| #define | TRIGGER_OP_numPending 04 |
| #define | ISM_SET_PAN_DRIFT_RATE 230 |
| #define | ISM_SET_TILT_DRIFT_RATE 231 |
| #define | ISM_GET_PAN_DRIFT_RATE 232 |
| #define | ISM_GET_TILT_DRIFT_RATE 233 |
| #define | SET_DESIRED_VELOCITIES 234 |
| #define | SET_DESIRED_VELOCITES_GET_POS 235 |
|
| |
| #define | PTU_CPI_CODE_VERSION "v1.09.12" |
| #define | PTU_OPCODE_VERSION "v1.07.07d" |
| #define | PTU_modelVersion 1 |
| #define | PTU_codeVersion 7 |
| #define | PTU_revision 6 |
| #define | PLN printf("debug line %d\n",__LINE__); |
| char | err |
| static portstream_fd | current_host_port |
| static char | speed_control_mode = PTU_INDEPENDENT_SPEED_CONTROL_MODE |
| static char | CHA_comm_active = FALSE |
|
| |
| #define | PTU_OK 0 |
| #define | PTU_ILLEGAL_COMMAND_ARGUMENT 1 |
| #define | PTU_ILLEGAL_COMMAND 2 |
| #define | PTU_ILLEGAL_POSITION_ARGUMENT 3 |
| #define | PTU_ILLEGAL_SPEED_ARGUMENT 4 |
| #define | PTU_ACCEL_TABLE_EXCEEDED 5 |
| #define | PTU_DEFAULTS_EEPROM_FAULT 6 |
| #define | PTU_SAVED_DEFAULTS_CORRUPTED 7 |
| #define | PTU_LIMIT_HIT 8 |
| #define | PTU_CABLE_DISCONNECTED 9 |
| #define | PTU_ILLEGAL_UNIT_ID 10 |
| #define | PTU_ILLEGAL_POWER_MODE 11 |
| #define | PTU_RESET_FAILED 12 |
| #define | PTU_NOT_RESPONDING 13 |
| #define | PTU_FIRMWARE_VERSION_TOO_LOW 14 |
| #define | PAN 1 |
| #define | TILT 2 |
| #define | POSITION 1 |
| #define | SPEED 2 |
| #define | ACCELERATION 3 |
| #define | BASE 4 |
| #define | UPPER_SPEED_LIMIT 5 |
| #define | LOWER_SPEED_LIMIT 6 |
| #define | MINIMUM_POSITION 7 |
| #define | MAXIMUM_POSITION 8 |
| #define | HOLD_POWER_LEVEL 9 |
| #define | MOVE_POWER_LEVEL 10 |
| #define | RESOLUTION 11 |
| #define | ISM_DRIFT 12 |
| #define | RELATIVE 1 |
| #define | ABSOLUTE 2 |
| #define | QUERY NULL |
| #define | PTU_HI_POWER 1 |
| #define | PTU_REG_POWER 2 |
| #define | PTU_LOW_POWER 3 |
| #define | PTU_OFF_POWER 4 |
| #define | COMMAND_EXECUTION_MODE 1 |
| #define | ASCII_VERBOSE_MODE 2 |
| #define | ASCII_ECHO_MODE 3 |
| #define | POSITION_LIMITS_MODE 4 |
| #define | DEFAULTS 5 |
| #define | SPEED_CONTROL_MODE 6 |
| #define | EXECUTE_IMMEDIATELY 1 |
| #define | EXECUTE_UPON_IMMEDIATE_OR_AWAIT 2 |
| #define | VERBOSE 1 |
| #define | TERSE 0 |
| #define | ON_MODE 1 |
| #define | OFF_MODE 0 |
| #define | SAVE_CURRENT_SETTINGS 0 |
| #define | RESTORE_SAVED_SETTINGS 1 |
| #define | RESTORE_FACTORY_SETTINGS 2 |
| #define | QUERY_MODE 3 |
| #define | ALL 3 |
| unsigned char | execute_set_desired_velocities (signed short int *, signed short int *) |
| char | set_ISM_desired_abs_positions (signed short int *Ppos, signed short int *Tpos) |
| char | get_ISM_desired_abs_positions (signed short int *Ppos, signed short int *Tpos) |
| typedef short int | PTU_PARM_PTR |
| typedef unsigned short int | UID_fd |
| typedef unsigned char(* | event_handler_fn_ptr_type )(unsigned char) |
|
| |
| short int | cPTU_Control::CheckPanLimits (short int Pos, unsigned char checkflag) |
| Class methods used to check if pan, speed and acceleration values are within allowed values. | |
| short int | cPTU_Control::CheckTiltLimits (short int Pos, unsigned char checkflag) |
| Checks for tilt limits. | |
| unsigned short int | cPTU_Control::CheckPanSLimits (unsigned short int Sp, unsigned char checkflag) |
| Checks for pan speed limits. | |
| unsigned short int | cPTU_Control::CheckTiltSLimits (unsigned short int Sp, unsigned char checkflag) |
| Checks for tilt speed limits. | |
|
| |
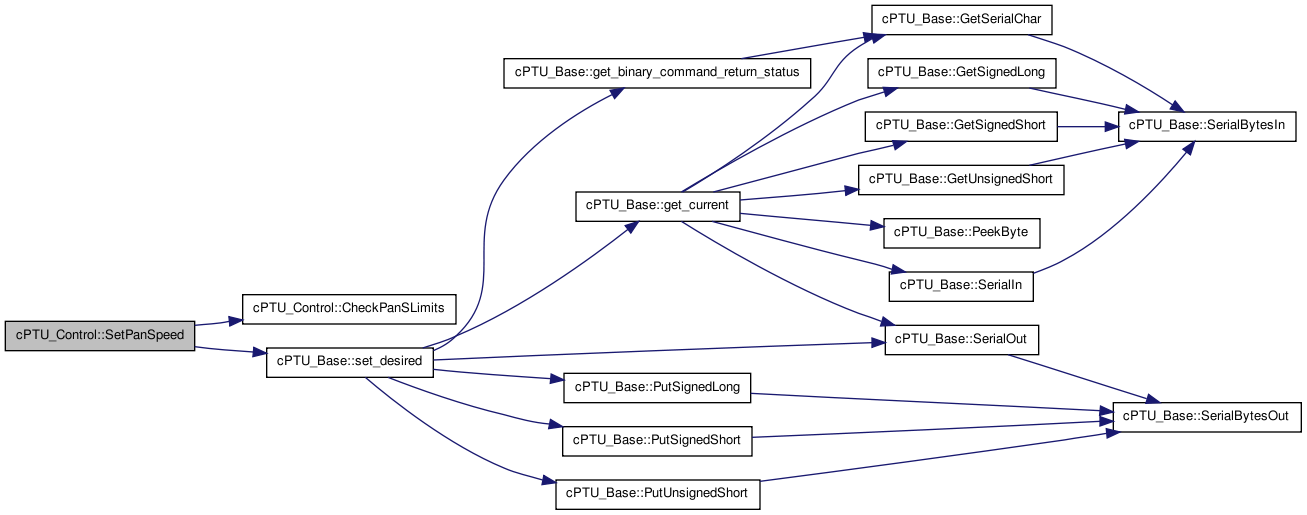
| int | cPTU_Control::SetPanSpeed (unsigned short int Speed) |
| Class methods used to set PTU motion parameters, position, speed and acceleration. | |
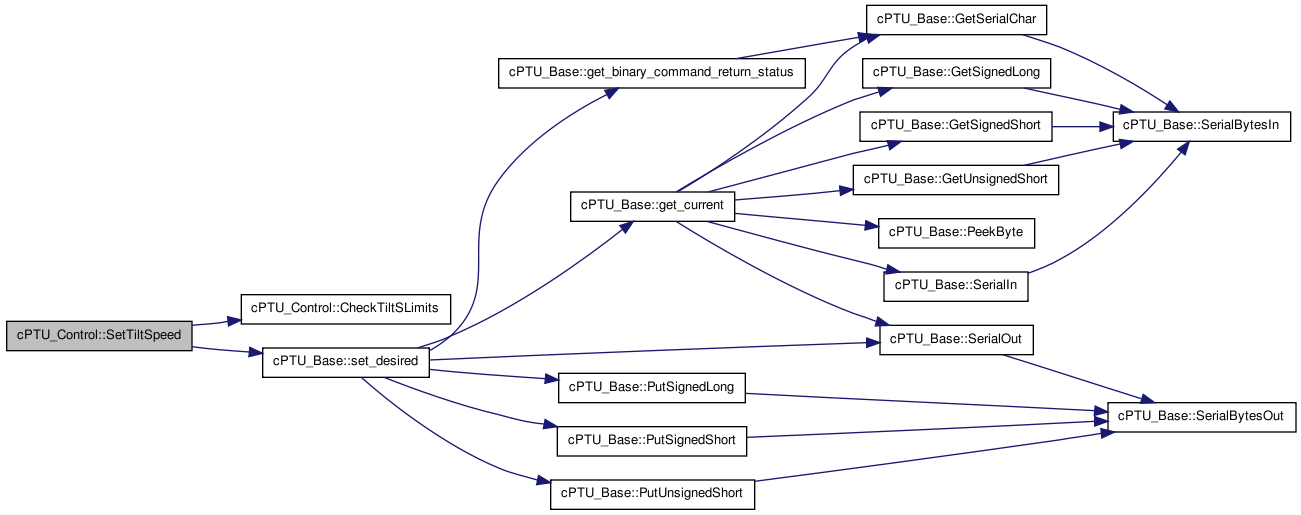
| int | cPTU_Control::SetTiltSpeed (unsigned short int Speed) |
| Sets tilt speed (updated). | |
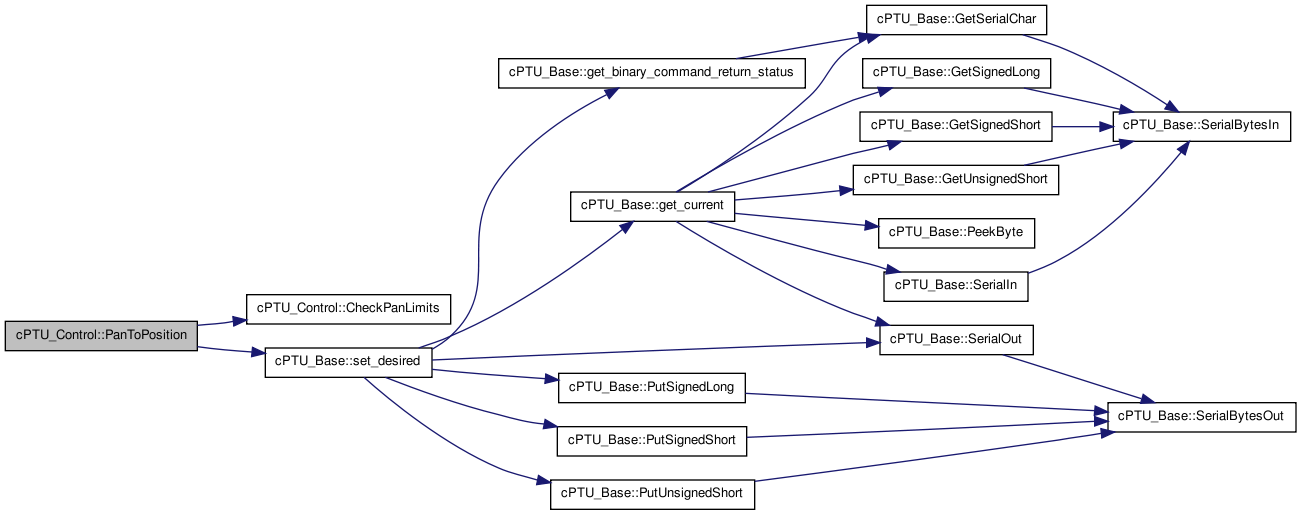
| int | cPTU_Control::PanToPosition (short int Pos) |
| Pans unit to Pos position. (updated). | |
| int | cPTU_Control::PanToAngle (double Angle) |
| Pans unit to angle Angle. | |
| int | cPTU_Control::PanOffsetToPosition (int Offset) |
| Pans unit to Offset from current position. | |
| int | cPTU_Control::TiltToPosition (short int Pos) |
| Tilts unit to Pos position. (updated). | |
| int | cPTU_Control::TiltToAngle (double Angle) |
| Tilts unit to angle Angle. | |
| int | cPTU_Control::TiltOffsetToPosition (int Offset) |
| Tilts unit to Offset from current position. | |
| int | cPTU_Control::PanTiltPosSpeed (short int PanPos, short int TiltPos, unsigned short int PanSpeed, unsigned short int TiltSpeed) |
| Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. (updated). | |
| int | cPTU_Control::PanTiltAngleSpeed (double PanAngle, double TiltAngle, unsigned short int PanSpeed, unsigned short int TiltSpeed) |
| Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. Its the same has PanTiltPosSpeed but pos is given in degrees. | |
| int | cPTU_Control::PanTiltAngleSpeedAngleperSec (double PanAngle, double TiltAngle, double PanSpeed, double TiltSpeed) |
| Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. Its the same has PanTiltPosSpeed but pos is given in degrees. | |
| int | cPTU_Control::SetPureVelocity (signed short int ps, signed short int ts) |
| Sets Pan and Tilt velocities. Pure velocity control must be enabled using SetPureVelocityControl(void). | |
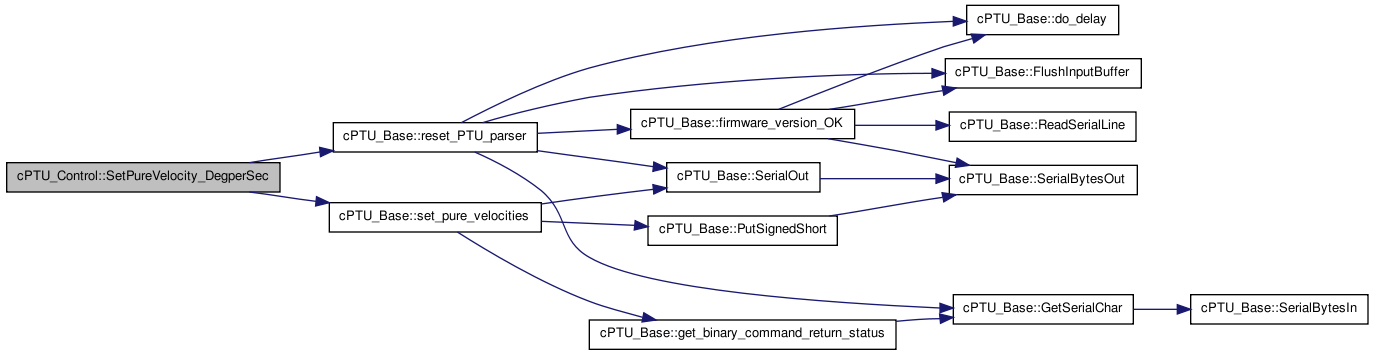
| int | cPTU_Control::SetPureVelocity_DegperSec (double ps, double ts) |
| Sets Pan and Tilt velocities. Pure velocity control must be enabled using SetPureVelocityControl(void). | |
Detailed Description
This module handles rs232 low level communication with the PTU.
Define Documentation
| #define _PANTILTRESOLUTION_ 0.0514285 |
Value used to convert degrees to pulses for the functions PanToAngle(double Angle) TiltToAngle(double Angle) and PanTiltAngleSpeed(double PanAngle, double TiltAngle, unsigned short int PanSpeed,unsigned short int TiltSpeed).
Referenced by cPTU_Control::cPTU_Control(), cPTU_Control::GetCurrentPanPdeg(), cPTU_Control::GetCurrentPanSdegsec(), cPTU_Control::GetCurrentTiltPdeg(), cPTU_Control::GetCurrentTiltSdegsec(), cPTU_Control::GetDesiredPanPdeg(), cPTU_Control::GetDesiredPanSdegsec(), cPTU_Control::GetDesiredTiltPdeg(), cPTU_Control::GetDesiredTiltSdegsec(), and cPTU_Control::SetPureVelocity_DegperSec().
| #define ABSOLUTE 2 |
| #define ACCELERATION 3 |
| #define ALL 3 |
| #define ASCII_COMMAND_WITH_NO_BINARY_EQUIV 6 |
| #define ASCII_ECHO_MODE 3 |
Referenced by cPTU_Base::set_mode().
| #define ASCII_VERBOSE_MODE 2 |
Referenced by cPTU_Base::set_mode().
| #define ASYNCHRONOUS_EVENT | ( | char_val | ) | ( (char_val >= 220) && (char_val < 240) ) |
| #define AWAIT_CHARSTREAM -1 |
| #define AWAIT_COMMAND_COMPLETION 167 |
Referenced by cPTU_Base::await_completion().
| #define BASE 4 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::set_desired().
| #define CABLE_DISCONNECT_DETECTED 222 |
Referenced by cPTU_Base::default_async_event_handler().
| #define CHECKSUM_ERROR 20 |
| #define COMMAND_EXECUTION_MODE 1 |
| #define DEBUG 0 |
| #define DEFAULTS 5 |
Referenced by cPTU_Base::set_mode().
| #define DISABLE_ECHO 182 |
Referenced by cPTU_Base::set_mode().
| #define DISABLE_JOYSTICK 195 |
| #define DISABLE_POSITION_LIMITS 173 |
Referenced by cPTU_Base::set_mode().
| #define DISPLAY_MENU_OPTIONS 4 |
| #define DISPLAY_PAN_MOTOR_COMMANDS 2 |
| #define DISPLAY_TILT_MOTOR_COMMANDS 3 |
| #define ECHO_QUERY 180 |
Referenced by cPTU_Base::set_mode().
| #define ENABLE_ECHO 181 |
Referenced by cPTU_Base::set_mode().
| #define ENABLE_JOYSTICK 194 |
| #define ENABLE_POSITION_LIMITS 172 |
Referenced by cPTU_Base::set_mode().
| #define EXECUTE_IMMEDIATELY 1 |
Referenced by cPTU_Base::set_mode(), and cPTU_Control::SetImmediatePositionExecution().
| #define EXECUTE_UPON_IMMEDIATE_OR_AWAIT 2 |
Referenced by cPTU_Base::set_mode(), and cPTU_Control::SetSlaveModeExecution().
| #define FALSE 0 |
| #define FALSE 0 |
Referenced by auxiliar_firei_server_3_shm_to_message(), auxiliar_hokuyo_shm_to_message(), auxiliar_ipm_shm_to_message(), button_press_event(), calculate_freespace_lanemarkers(), calculate_freespace_laserobstacles(), calculate_traj_distance_to_atractor_pts(), calculate_traj_distance_to_repulsor_pts(), carmen_gps_parse_data(), check_status(), class_advancedfloodfill::clear_filled_values(), class_advancedfloodfill::clear_seed_values(), clusters2objects(), compute_distance_traveled(), cPTU_Base::config_CHA(), cPTU_Base::config_CHA_38400(), create_groups_from_basepoints(), createWindow(), cross_computation(), playback::Deactivate(), delete_event(), DEVICE_read_data(), DEVICE_send(), class_advancedfloodfill::do_floodfill(), draw(), draw_obstacles(), drawGPSpoint(), expose_event(), fill_group_lines(), filtergroup_byavgwidth(), filtergroup_bynormalcount(), filtergroup_bynormalgradsigma(), filtergroup_bynormalsigma(), filtergroup_bywidthsigma(), filtergroups_bysize(), filtergroups_byvalleys(), findgroups_rightpix(), cPTU_Base::firmware_version_OK(), cPTU_Base::get_binary_command_return_status(), get_new_target_information(), getfinallines(), base_firei_control::GetFrame(), base_firei_control::GetFrame_dma(), getgroup_overallcandidate(), getnormaltogroup(), gps_parse_gga(), gps_parse_rmc(), high_level_obstacle_avoidance_and_speed_control(), idle(), playback::IndexHandler(), istrue(), layoutWidgets(), logger::logger(), main(), base_firei_control::OpenHandle(), optional_signs_computation(), cPTU_Base::PeekByte(), plugin_init(), logger::ReadFormatsFromFile(), cPTU_Base::ReadSerialLine(), relocate_atractor_pts(), cPTU_Base::reset_PTU_parser(), search_for_new_target(), send_dir_and_speed(), send_vs_command(), cPTU_Base::SerialBytesIn(), cPTU_Base::SerialBytesOut(), cPTU_Base::talkto_CHA(), cPTU_Base::talkto_PTUcontroller(), and writeData().
| #define FIRMWARE_VERSION_QUERY 196 |
Referenced by cPTU_Base::firmware_version().
| #define FORPTUTOSTOP -1 |
Standart include. kde project default includes.
Standart include. kde project default includes.
Standart include. input output definitions.
#ifndef _PTU_BASE_H_ #define _PTU_BASE_H_ #include <termios.h> #include <stdio.h> #include <fcntl.h> #include <sys/types.h> #include <sys/time.h> #include <unistd.h> #include <string.h> #include <stdio.h> #include <ctype.h> #include <string.h> #include "linuxser.h" #include "ptu.h" #include "opcodes.h" class cPTU_Base { public: // cPTU_Base(){async_event_handler_fn_ptr = (unsigned char (*) (unsigned char)) default_async_event_handler;}; // cPTU_Base(){async_event_handler_fn_ptr = (unsigned char) default_async_event_handler;}; //From linuxser.c portstream_fd openserial(char *portname); portstream_fd openserial_38400(char *portname); char closeserial(portstream_fd pt_fd); char SerialBytesOut(portstream_fd pt_fd, unsigned char *buffer,int nBytes); char SerialBytesIn (portstream_fd pt_fd, unsigned char *buffer, unsigned int nBytes, long timeoutVal); char PeekByte(portstream_fd portstream, unsigned char *peekedByte); char FlushInputBuffer(portstream_fd pt_fd); char SerialStringOut(portstream_fd pt_fd, unsigned char *buffer); char ReadSerialLine(portstream_fd pt_fd, unsigned char *strbuffer, long timeoutVal, int *charsRead); void do_delay(long millisec); char GetSignedShort(portstream_fd portstream, signed short *SHORTval, long timeout); char PutSignedShort(portstream_fd portstream, signed short *SHORTval); char GetUnsignedShort(portstream_fd portstream, unsigned short *USHORTval, long timeout); char PutUnsignedShort(portstream_fd portstream, unsigned short *USHORTval); char GetSignedLong(portstream_fd portstream, signed long *LONGval, long timeout); char PutSignedLong(portstream_fd portstream, signed long *LONGval); char reset_ptu_tilt(void); unsigned char default_async_event_handler(unsigned char async_event); unsigned char set_async_event_handler( void (*async_event_handler) (unsigned char) ); portstream_fd open_host_port(char *portname); portstream_fd open_host_port_38400(char *portname); /*extern */char set_baud_rate(int baudrate); char close_host_port(portstream_fd portstream); unsigned char GetSerialChar(char await_char); unsigned char get_binary_command_return_status(); char SerialOut(unsigned char outchar); unsigned char SerialIn(); char select_host_port(portstream_fd portstream); char reset_ptu(void); char reset_ptu_pan(void); char firmware_version_OK(void); char reset_PTU_parser(long timeout_in_msec); char set_desired(char axis, char kinematic_property,PTU_PARM_PTR *value, char movement_mode); char await_completion(void); long get_current(char axis, char kinematic_property); long get_desired(char axis, char kinematic_property); char set_mode(char mode_type, char mode_parameter); char halt(char halt_type); char* firmware_version(void); char select_unit(UID_fd unit_ID); char set_unit_id(UID_fd unit_ID); char set_PTU_motion(short int desired_pan_pos, short int desired_tilt_pos, unsigned short int desired_pan_speed, unsigned short int desired_tilt_speed); char get_PTU_motion(short int *desired_pan_pos, short int *desired_tilt_pos,unsigned short int *desired_pan_speed, unsigned short int *desired_tilt_speed); char config_CHA(); char config_CHA_38400(); char talkto_CHA(); char talkto_PTUcontroller(); char set_pure_velocities(signed short int *pan_speed, signed short int *tilt_speed); unsigned char set_TTL_outputs(unsigned char in_TTL_control_byte); unsigned char get_TTL_values(); unsigned char TriggerOn(signed short int startPanPos, signed short int deltaPos, signed short int numTriggers); unsigned char TriggerOff(); signed short int TriggersPending(); char set_desired_abs_positions(signed short int *Ppos, signed short int *Tpos); char get_current_positions(signed short int *Ppos, signed short int *Tpos); char set_ISM_desired_abs_positions(signed short int *Ppos, signed short int *Tpos); char get_ISM_desired_abs_positions(signed short int *Ppos, signed short int *Tpos); unsigned char checksum_on_2_2B(unsigned char *val1, unsigned char *val2); unsigned char execute_set_desired_velocities(signed short int *Pspeed, signed short int *Tspeed); //unsigned char checksum_on_2_2B(unsigned char *val1, unsigned char *val2); //unsigned char execute_set_desired_velocities(signed short int *Pspeed, signed short int *Tspeed); event_handler_fn_ptr_type async_event_handler_fn_ptr; private: }; #endif
header for base class built from C Programmers Interface given by Directed Perception.
Possible argument of Wait(int t) when we wish to wait completion of some PTU motion.
| #define GCU_ERROR 15 |
| #define HALT 168 |
Referenced by cPTU_Base::halt().
| #define HALT_PAN 169 |
Referenced by cPTU_Base::halt().
| #define HALT_TILT 170 |
Referenced by cPTU_Base::halt().
| #define HOLD_POWER_LEVEL 9 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::set_desired().
| #define ILLEGAL_ARGUMENT 8 |
| #define ILLEGAL_COMMAND_WITH_DELIMITER 5 |
| #define ILLEGAL_OPCODE 7 |
| #define INT_REVERSED |
| #define INTERACTIVE_MAIN_MENU 1 |
| #define ISM_DRIFT 12 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::set_desired().
| #define ISM_GET_PAN_DRIFT_RATE 232 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define ISM_GET_TILT_DRIFT_RATE 233 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define ISM_SET_PAN_DRIFT_RATE 230 |
Referenced by cPTU_Base::set_desired().
| #define ISM_SET_TILT_DRIFT_RATE 231 |
Referenced by cPTU_Base::set_desired().
| #define JOYSTICK_QUERY 193 |
| #define LAST_0ARG_OPCODE 196 |
| #define LAST_1BYTE_ARG_OPCODE 200 |
| #define LAST_2BYTE_INT_OPCODE 144 |
| #define LAST_4BYTE_ARG_OPCODE 202 |
| #define LAST_SIGNED_2BYTE_INT_OPCODE 136 |
| #define LOWER_SPEED_LIMIT 6 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::set_desired().
| #define MAX_OPCODE 235 |
| #define MAXIMUM_POSITION 8 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define MINIMUM_POSITION 7 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define MOVE_POWER_LEVEL 10 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::set_desired().
| #define NOT_SUPPORTED_BY_THIS_FIRMWARE_VERSION 17 |
| #define NUM_OPCODES (MAX_OPCODE - OPCODE_BASE + 1) |
| #define OFF_MODE 0 |
Referenced by cPTU_Base::set_mode(), and cPTU_Control::SetAsciiEchoMode().
| #define ON_MODE 1 |
Referenced by cPTU_Base::set_mode(), and cPTU_Control::SetAsciiEchoMode().
| #define OPCODE_BASE 129 |
| #define OPCODE_VERSION "v1.09.12" |
| #define OUTSIDE_ENVIRONMENT_QUERY 224 |
| #define PAN 1 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), cPTU_Control::GetCurrentPanA(), cPTU_Control::GetCurrentPanP(), cPTU_Control::GetCurrentPanS(), cPTU_Control::GetCurrentPanSdegsec(), cPTU_Control::GetDesiredPanA(), cPTU_Control::GetDesiredPanP(), cPTU_Control::GetDesiredPanPdeg(), cPTU_Control::GetDesiredPanR(), cPTU_Control::GetDesiredPanS(), cPTU_Control::GetDesiredPanSdegsec(), cPTU_Base::halt(), cPTU_Control::PanToPosition(), cPTU_Base::set_desired(), and cPTU_Control::SetPanSpeed().
| #define PAN_ACCEL_QUERY 163 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_BASE_SPEED_QUERY 157 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_CURRENT_POS_QUERY 145 |
| #define PAN_CURRENT_SPEED_QUERY 153 |
Referenced by cPTU_Base::get_current().
| #define PAN_DESIRED_POS_QUERY 147 |
Referenced by cPTU_Base::get_desired().
| #define PAN_DESIRED_SPEED_QUERY 155 |
Referenced by cPTU_Base::get_desired().
| #define PAN_HOLD_POWER_QUERY 186 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::reset_PTU_parser().
| #define PAN_LIMIT_HIT 220 |
| #define PAN_LOWER_SPEED_LIMIT_QUERY 161 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_MAX_POSITION_QUERY 151 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_MIN_POSITION_QUERY 149 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_MOVE_POWER_QUERY 188 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_POSITION_TRIGGER_HIT 223 |
| #define PAN_RESOLUTION_QUERY 165 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PAN_SET_ABS_POS 129 |
Referenced by cPTU_Base::set_desired(), and cPTU_Base::set_desired_abs_positions().
| #define PAN_SET_ABS_SPEED 135 |
Referenced by cPTU_Base::set_desired(), and cPTU_Base::set_pure_velocities().
| #define PAN_SET_ACCEL 201 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_BASE_SPEED 137 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_HOLD_POWER 197 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_LOWER_SPEED_LIMIT 141 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_MOVE_POWER 199 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_REL_POS 131 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_REL_SPEED 133 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SET_UPPER_SPEED_LIMIT 139 |
Referenced by cPTU_Base::set_desired().
| #define PAN_SPEED_TRIGGER_HIT 225 |
| #define PAN_TILT_GET_ABS_POS 241 |
| #define PAN_TILT_SET_ABS_POS 240 |
Referenced by cPTU_Base::set_ISM_desired_abs_positions().
| #define PAN_UPPER_SPEED_LIMIT_QUERY 159 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define PLN printf("debug line %d\n",__LINE__); |
Referenced by firei_0_image_handler(), firei_1_image_handler(), main(), and cPTU_Base::set_pure_velocities().
| #define PORT_NOT_OPENED -1 |
| #define POSITION 1 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), cPTU_Control::GetCurrentPanP(), cPTU_Control::GetCurrentTiltP(), cPTU_Control::GetDesiredPanP(), cPTU_Control::GetDesiredPanPdeg(), cPTU_Control::GetDesiredTiltP(), cPTU_Control::GetDesiredTiltPdeg(), cPTU_Control::PanToPosition(), cPTU_Base::set_desired(), and cPTU_Control::TiltToPosition().
| #define POSITION_LIMITS_MODE 4 |
Referenced by cPTU_Base::set_mode().
| #define POSITION_LIMITS_QUERY 171 |
Referenced by cPTU_Base::set_mode().
| #define PRESET_CLEAR 227 |
| #define PRESET_GOTO 226 |
| #define PRESET_SET 225 |
| #define PTU_ACCEL_TABLE_EXCEEDED 5 |
| #define PTU_ACCEL_TABLE_EXCEEDED 5 |
| #define PTU_CABLE_DISCONNECTED 9 |
| #define PTU_CABLE_DISCONNECTED 9 |
| #define PTU_codeVersion 7 |
Referenced by cPTU_Base::firmware_version_OK().
| #define PTU_CPI_CODE_VERSION "v1.09.12" |
| #define PTU_DEFAULTS_EEPROM_FAULT 6 |
| #define PTU_DEFAULTS_EEPROM_FAULT 6 |
| #define PTU_DUART_ERROR 14 |
| #define PTU_ERROR 16 |
| #define PTU_FIRMWARE_VERSION_TOO_LOW 14 |
| #define PTU_HI_POWER 1 |
| #define PTU_HI_POWER 1 |
| #define PTU_ILLEGAL_COMMAND 2 |
| #define PTU_ILLEGAL_COMMAND 2 |
| #define PTU_ILLEGAL_COMMAND_ARGUMENT 1 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), cPTU_Base::set_desired(), and cPTU_Base::set_mode().
| #define PTU_ILLEGAL_PARAMETERS 13 |
| #define PTU_ILLEGAL_POSITION_ARGUMENT 3 |
| #define PTU_ILLEGAL_POSITION_ARGUMENT 3 |
| #define PTU_ILLEGAL_POWER_MODE 11 |
| #define PTU_ILLEGAL_POWER_MODE 11 |
| #define PTU_ILLEGAL_SPEED_ARGUMENT 4 |
| #define PTU_ILLEGAL_SPEED_ARGUMENT 4 |
| #define PTU_ILLEGAL_UNIT_ID 10 |
| #define PTU_ILLEGAL_UNIT_ID 10 |
| #define PTU_INDEPENDENT_SPEED_CONTROL_MODE 1 |
| #define PTU_LIMIT_HIT 8 |
| #define PTU_LIMIT_HIT 8 |
| #define PTU_LOW_POWER 3 |
| #define PTU_LOW_POWER 3 |
| #define PTU_modelVersion 1 |
Referenced by cPTU_Base::firmware_version_OK().
| #define PTU_NOT_RESPONDING 13 |
Referenced by cPTU_Base::reset_PTU_parser().
| #define PTU_OFF_POWER 4 |
| #define PTU_OFF_POWER 4 |
Referenced by cPTU_Base::reset_PTU_parser().
| #define PTU_OK 0 |
Referenced by cPTU_Base::get_PTU_motion(), cPTU_Base::reset_PTU_parser(), and cPTU_Base::set_pure_velocities().
| #define PTU_OK 0 |
| #define PTU_OPCODE_VERSION "v1.07.07d" |
| #define PTU_PURE_VELOCITY_SPEED_CONTROL_MODE 2 |
Referenced by cPTU_Base::set_mode(), and cPTU_Control::SetPureVelocityControl().
| #define PTU_REG_POWER 2 |
| #define PTU_REG_POWER 2 |
Referenced by cPTU_Base::reset_PTU_parser().
| #define PTU_RESET_FAILED 12 |
| #define PTU_RESET_FAILED 12 |
| #define PTU_revision 6 |
Referenced by cPTU_Base::firmware_version_OK().
| #define PTU_SAVED_DEFAULTS_CORRUPTED 7 |
| #define PTU_SAVED_DEFAULTS_CORRUPTED 7 |
| #define PTU_TILT_VANE_OUT_OF_RANGE_ERROR 19 |
| #define QUERY NULL |
| #define QUERY_CURRENT_PTU_MOTION 223 |
Referenced by cPTU_Base::get_PTU_motion().
| #define QUERY_MODE 3 |
Referenced by cPTU_Base::set_mode().
| #define QUERY_SPEED_CONTROL_MODE 203 |
Referenced by cPTU_Base::set_mode().
| #define RELATIVE 1 |
Referenced by cPTU_Base::set_desired().
| #define RESOLUTION 11 |
| #define RESTORE_FACTORY_DEFAULTS 185 |
Referenced by cPTU_Base::set_mode().
| #define RESTORE_FACTORY_SETTINGS 2 |
Referenced by cPTU_Base::set_mode().
| #define RESTORE_SAVED_DEFAULTS 184 |
Referenced by cPTU_Base::set_mode().
| #define RESTORE_SAVED_SETTINGS 1 |
Referenced by cPTU_Base::set_mode().
| #define SAVE_CURRENT_SETTINGS 0 |
Referenced by cPTU_Base::set_mode().
| #define SAVE_DEFAULTS 183 |
Referenced by cPTU_Base::set_mode().
| #define SELECT_UNIT_ID 144 |
| #define SERIAL_CODE_VERSION "LINUX v1.0d" |
| #define SET_DESIRED_PTU_MOTION 222 |
Referenced by cPTU_Base::set_PTU_motion().
| #define SET_DESIRED_VELOCITES_GET_POS 235 |
| #define SET_DESIRED_VELOCITIES 234 |
Referenced by cPTU_Base::execute_set_desired_velocities().
| #define SET_IMMEDIATE_COMMAND_MODE 174 |
Referenced by cPTU_Base::set_mode().
| #define SET_INDEPENDENT_CONTROL_MODE 204 |
Referenced by cPTU_Base::set_mode().
| #define SET_PURE_VELOCITY_CONTROL_MODE 205 |
Referenced by cPTU_Base::set_mode().
| #define SET_SLAVED_COMMAND_MODE 175 |
Referenced by cPTU_Base::set_mode().
| #define SET_UNIT_ID 143 |
Referenced by cPTU_Base::set_unit_id().
| #define SET_VERBOSE_ASCII_OFF 192 |
Referenced by cPTU_Base::set_mode().
| #define SET_VERBOSE_ASCII_ON 191 |
Referenced by cPTU_Base::set_mode().
| #define SPECIAL_OPCODE 203 |
| #define SPEED 2 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), cPTU_Control::GetCurrentPanS(), cPTU_Control::GetCurrentPanSdegsec(), cPTU_Control::GetCurrentTiltS(), cPTU_Control::GetCurrentTiltSdegsec(), cPTU_Control::GetDesiredPanS(), cPTU_Control::GetDesiredPanSdegsec(), cPTU_Control::GetDesiredTiltS(), cPTU_Control::GetDesiredTiltSdegsec(), cPTU_Base::set_desired(), cPTU_Control::SetPanSpeed(), and cPTU_Control::SetTiltSpeed().
| #define SPEED_CONTROL_MODE 6 |
| #define TERSE 0 |
Referenced by cPTU_Base::set_mode().
| #define TILT 2 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), cPTU_Control::GetCurrentTiltA(), cPTU_Control::GetCurrentTiltP(), cPTU_Control::GetCurrentTiltS(), cPTU_Control::GetCurrentTiltSdegsec(), cPTU_Control::GetDesiredTiltA(), cPTU_Control::GetDesiredTiltP(), cPTU_Control::GetDesiredTiltPdeg(), cPTU_Control::GetDesiredTiltR(), cPTU_Control::GetDesiredTiltS(), cPTU_Control::GetDesiredTiltSdegsec(), cPTU_Base::halt(), cPTU_Base::set_desired(), cPTU_Control::SetTiltSpeed(), and cPTU_Control::TiltToPosition().
| #define TILT_ACCEL_QUERY 164 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_BASE_SPEED_QUERY 158 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_CURRENT_POS_QUERY 146 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_current_positions().
| #define TILT_CURRENT_SPEED_QUERY 154 |
Referenced by cPTU_Base::get_current().
| #define TILT_DESIRED_POS_QUERY 148 |
Referenced by cPTU_Base::get_desired().
| #define TILT_DESIRED_SPEED_QUERY 156 |
Referenced by cPTU_Base::get_desired().
| #define TILT_HOLD_POWER_QUERY 187 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_LIMIT_HIT 221 |
| #define TILT_LOWER_SPEED_LIMIT_QUERY 162 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_MAX_POSITION_QUERY 152 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_MIN_POSITION_QUERY 150 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_MOVE_POWER_QUERY 189 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_POSITION_TRIGGER_HIT 224 |
| #define TILT_RESOLUTION_QUERY 166 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TILT_SET_ABS_POS 130 |
Referenced by cPTU_Base::set_desired(), and cPTU_Base::set_desired_abs_positions().
| #define TILT_SET_ABS_SPEED 136 |
Referenced by cPTU_Base::set_desired(), and cPTU_Base::set_pure_velocities().
| #define TILT_SET_ACCEL 202 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_BASE_SPEED 138 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_HOLD_POWER 198 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_LOWER_SPEED_LIMIT 142 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_MOVE_POWER 200 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_REL_POS 132 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_REL_SPEED 134 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SET_UPPER_SPEED_LIMIT 140 |
Referenced by cPTU_Base::set_desired().
| #define TILT_SPEED_TRIGGER_HIT 226 |
| #define TILT_UPPER_SPEED_LIMIT_QUERY 160 |
Referenced by cPTU_Base::get_current(), and cPTU_Base::get_desired().
| #define TIMEOUT_CHAR_READ -1 |
Referenced by cPTU_Base::ReadSerialLine().
| #define TRIGGER_CONTROLS 229 |
Referenced by cPTU_Base::TriggerOff(), cPTU_Base::TriggerOn(), and cPTU_Base::TriggersPending().
| #define TRIGGER_OP_numPending 04 |
Referenced by cPTU_Base::TriggersPending().
| #define TRIGGER_OP_off 02 |
Referenced by cPTU_Base::TriggerOff().
| #define TRIGGER_OP_on 01 |
Referenced by cPTU_Base::TriggerOn().
| #define TRUE 1 |
Referenced by playback::Activate(), auxiliar_firei_server_3_shm_to_message(), auxiliar_hokuyo_shm_to_message(), auxiliar_ipm_shm_to_message(), bus_call(), button_press_event(), calculate_freespace_lanemarkers(), calculate_freespace_laserobstacles(), calculate_traj_distance_to_atractor_pts(), calculate_traj_distance_to_repulsor_pts(), check_command(), check_status(), cPTU_Base::closeserial(), clusters2objects(), compute_distance_traveled(), cPTU_Base::config_CHA(), cPTU_Base::config_CHA_38400(), configure_event(), cPTU_Control::cPTU_Control(), cross_computation(), cPTU_Base::default_async_event_handler(), DEVICE_send(), class_advancedfloodfill::do_floodfill(), draw(), draw_obstacles(), drawGPSpoint(), filtergroup_byavgwidth(), filtergroup_bynormalcount(), filtergroup_bynormalgradsigma(), filtergroup_bynormalsigma(), filtergroup_bywidthsigma(), filtergroups_bysize(), filtergroups_byvalleys(), findgroups_rightpix(), cPTU_Base::firmware_version_OK(), cPTU_Base::FlushInputBuffer(), cPTU_Base::get_binary_command_return_status(), cPTU_Base::get_current(), cPTU_Base::get_desired(), get_new_target_information(), get_ratios(), cPTU_Base::get_TTL_values(), getfinallines(), base_firei_control::GetFrame(), base_firei_control::GetFrame_dma(), getnormaltogroup(), cPTU_Base::GetSerialChar(), cPTU_Base::GetSignedLong(), cPTU_Base::GetSignedShort(), cPTU_Base::GetUnsignedShort(), gps_parse_gga(), gps_parse_rmc(), handler_gga_msg_received(), handler_msg_received(), handler_rmc_msg_received(), handler_xsensmsg_received(), heartbeat_handler(), high_level_obstacle_avoidance_and_speed_control(), idle(), playback::IndexHandler(), init_crc16_tab(), init_crc32_tab(), init_crcccitt_tab(), init_crcdnp_tab(), init_crckermit_tab(), logger::InstallParameters(), istrue(), laser_handler(), layoutWidgets(), main(), motion_notify_event(), open_xml(), base_firei_control::OpenHandle(), optional_signs_computation(), plugin_init(), ptucontrol_command_handler(), cPTU_Base::PutSignedLong(), cPTU_Base::PutSignedShort(), cPTU_Base::PutUnsignedShort(), cPTU_Base::ReadSerialLine(), receiver_handler(), relocate_atractor_pts(), reset_hyp(), cPTU_Base::reset_ptu(), cPTU_Base::reset_ptu_pan(), cPTU_Base::reset_PTU_parser(), cPTU_Base::reset_ptu_tilt(), reshape(), road_msg_received_handler(), save(), score_trajectories(), search_for_new_target(), cPTU_Base::select_unit(), send_dir_and_speed(), send_vs_command(), sensorfusion_heartbeat_handler(), cPTU_Base::SerialBytesIn(), cPTU_Base::SerialBytesOut(), cPTU_Base::SerialStringOut(), cPTU_Base::set_TTL_outputs(), cPTU_Base::set_unit_id(), logger::StartLog(), playback::StepBackward(), playback::StepForward(), cPTU_Base::talkto_CHA(), cPTU_Base::talkto_PTUcontroller(), cPTU_Base::TriggerOff(), cPTU_Base::TriggerOn(), where_we_are(), WindowDump(), writeData(), zoom_change(), zoom_in(), zoom_out(), and zoom_window().
| #define TTL_CONTROLS 228 |
Referenced by cPTU_Base::get_TTL_values(), and cPTU_Base::set_TTL_outputs().
| #define UNIT_ID_QUERY 179 |
| #define UNIT_RESET 176 |
Referenced by cPTU_Base::reset_ptu().
| #define UNIT_RESET_ON_POWERUP 177 |
| #define UNIT_RESET_ON_POWERUP_DISABLED 178 |
| #define UNIT_RESET_PAN 220 |
Referenced by cPTU_Base::reset_ptu_pan().
| #define UNIT_RESET_TILT 221 |
Referenced by cPTU_Base::reset_ptu_tilt().
| #define UPPER_SPEED_LIMIT 5 |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), and cPTU_Base::set_desired().
| #define VERBOSE 1 |
Referenced by cPTU_Base::set_mode().
| #define VERBOSE_QUERY 190 |
Referenced by cPTU_Base::set_mode().
Typedef Documentation
| typedef unsigned char(* event_handler_fn_ptr_type)(unsigned char) |
| typedef int portstream_fd |
| typedef short int PTU_PARM_PTR |
| typedef unsigned short int UID_fd |
Function Documentation
| short int cPTU_Control::CheckPanLimits | ( | short int | Pos, | |
| unsigned char | checkflag | |||
| ) | [private, inherited] |
Class methods used to check if pan, speed and acceleration values are within allowed values.
These functions only operate if flag checklimits is TRUE. Use SetCheckLimits(unsigned char val) to set this flag. By default the limits are checked. Checks for pan limits
- Parameters:
-
Pos value to check checkflag if the check operation should or not be executed.
- Returns:
- the checked value. Original Pos if it was not out of the limits
Referenced by cPTU_Control::PanTiltPosSpeed(), cPTU_Control::PanToAngle(), and cPTU_Control::PanToPosition().

| unsigned short int cPTU_Control::CheckPanSLimits | ( | unsigned short int | Sp, | |
| unsigned char | checkflag | |||
| ) | [private, inherited] |
Checks for pan speed limits.
- Parameters:
-
Sp value to check checkflag if the check operation should or not be executed.
- Returns:
- the checked value. Original Pos if it was not out of the limits
Referenced by cPTU_Control::PanTiltPosSpeed(), and cPTU_Control::SetPanSpeed().

| short int cPTU_Control::CheckTiltLimits | ( | short int | Pos, | |
| unsigned char | checkflag | |||
| ) | [private, inherited] |
Checks for tilt limits.
- Parameters:
-
Pos value to check checkflag if the check operation should or not be executed.
- Returns:
- the checked value. Original Pos if it was not out of the limits
Referenced by cPTU_Control::PanTiltPosSpeed(), and cPTU_Control::TiltToPosition().

| unsigned short int cPTU_Control::CheckTiltSLimits | ( | unsigned short int | Sp, | |
| unsigned char | checkflag | |||
| ) | [private, inherited] |
Checks for tilt speed limits.
- Parameters:
-
Sp value to check checkflag if the check operation should or not be executed.
- Returns:
- the checked value. Original Pos if it was not out of the limits
Referenced by cPTU_Control::PanTiltPosSpeed(), and cPTU_Control::SetTiltSpeed().

| char closeserial | ( | portstream_fd | ) |
| void do_delay | ( | long | ) |
| unsigned char execute_set_desired_velocities | ( | signed short int * | , | |
| signed short int * | ||||
| ) |
| char FlushInputBuffer | ( | portstream_fd | ) |
| char get_ISM_desired_abs_positions | ( | signed short int * | Ppos, | |
| signed short int * | Tpos | |||
| ) |
| char GetSignedLong | ( | portstream_fd | , | |
| signed long * | , | |||
| long | ||||
| ) |
| char GetSignedShort | ( | portstream_fd | , | |
| signed short * | , | |||
| long | ||||
| ) |
| char GetUnsignedShort | ( | portstream_fd | , | |
| unsigned short * | , | |||
| long | ||||
| ) |
| portstream_fd openserial | ( | char * | portname | ) |
| int cPTU_Control::PanOffsetToPosition | ( | int | Offset | ) | [inherited] |
Pans unit to Offset from current position.
- Parameters:
-
Offset value to perform.
- Returns:
- Function result (0 is OK; -1 NOK)
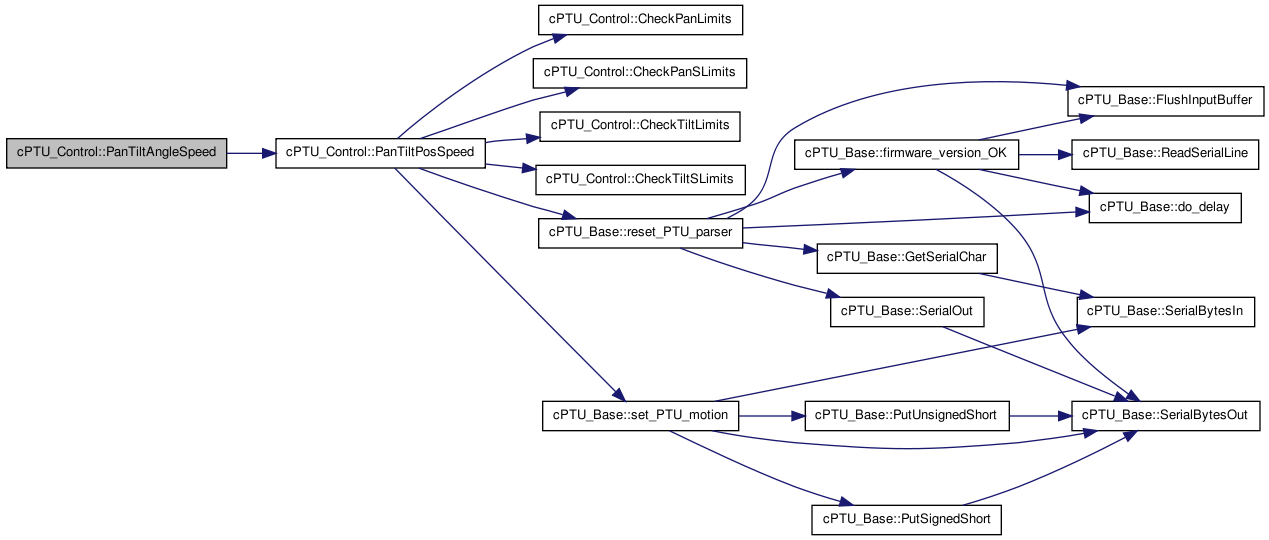
| int cPTU_Control::PanTiltAngleSpeed | ( | double | PanAngle, | |
| double | TiltAngle, | |||
| unsigned short int | PanSpeed, | |||
| unsigned short int | TiltSpeed | |||
| ) | [inherited] |
Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. Its the same has PanTiltPosSpeed but pos is given in degrees.
- Parameters:
-
PanAngle pan position in degrees TiltAngle tilt position PanSpeed pan speed TiltSpeed tilt speed
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Control::PanTiltPosSpeed().
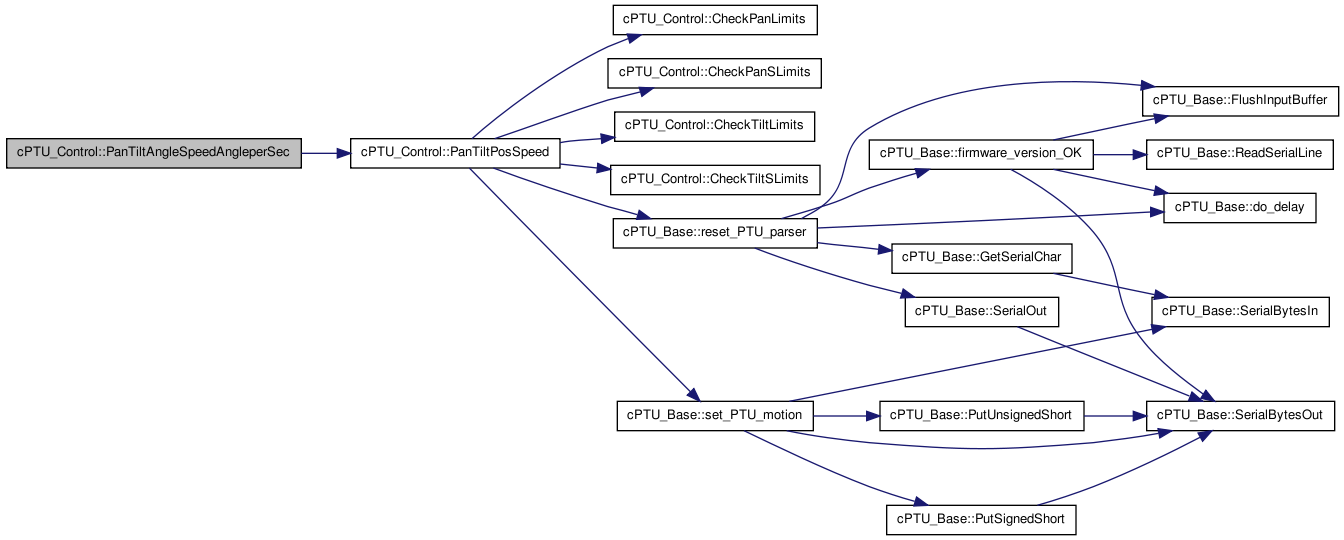
| int cPTU_Control::PanTiltAngleSpeedAngleperSec | ( | double | PanAngle, | |
| double | TiltAngle, | |||
| double | PanSpeed, | |||
| double | TiltSpeed | |||
| ) | [inherited] |
Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. Its the same has PanTiltPosSpeed but pos is given in degrees.
- Parameters:
-
PanAngle pan position in degrees TiltAngle tilt position in degrees PanSpeed pan speed in degrees/sec TiltSpeed tilt speed in degrees/sec
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Control::PanTiltPosSpeed().
Referenced by ptucontrol_command_handler().

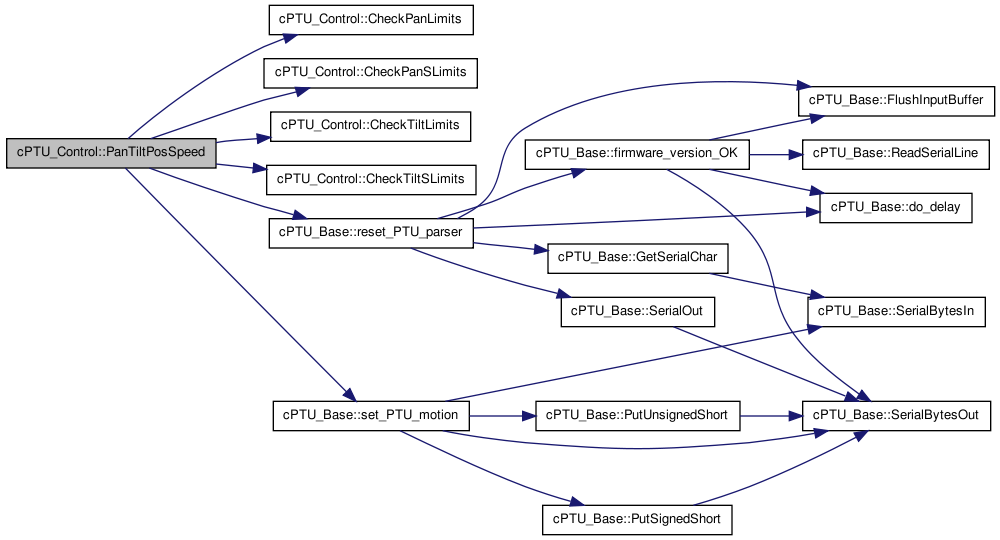
| int cPTU_Control::PanTiltPosSpeed | ( | short int | PanPos, | |
| short int | TiltPos, | |||
| unsigned short int | PanSpeed, | |||
| unsigned short int | TiltSpeed | |||
| ) | [inherited] |
Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. (updated).
- Parameters:
-
PanPos pan position TiltPos tilt position PanSpeed pan speed TiltSpeed tilt speed
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Control::CheckPanLimits(), cPTU_Control::CheckPanSLimits(), cPTU_Control::CheckTiltLimits(), cPTU_Control::CheckTiltSLimits(), cPTU_Base::reset_PTU_parser(), ret, and cPTU_Base::set_PTU_motion().
Referenced by cPTU_Control::PanTiltAngleSpeed(), and cPTU_Control::PanTiltAngleSpeedAngleperSec().

| int cPTU_Control::PanToAngle | ( | double | Angle | ) | [inherited] |
Pans unit to angle Angle.
- Parameters:
-
Angle to move to.
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Control::CheckPanLimits(), and cPTU_Control::PanToPosition().
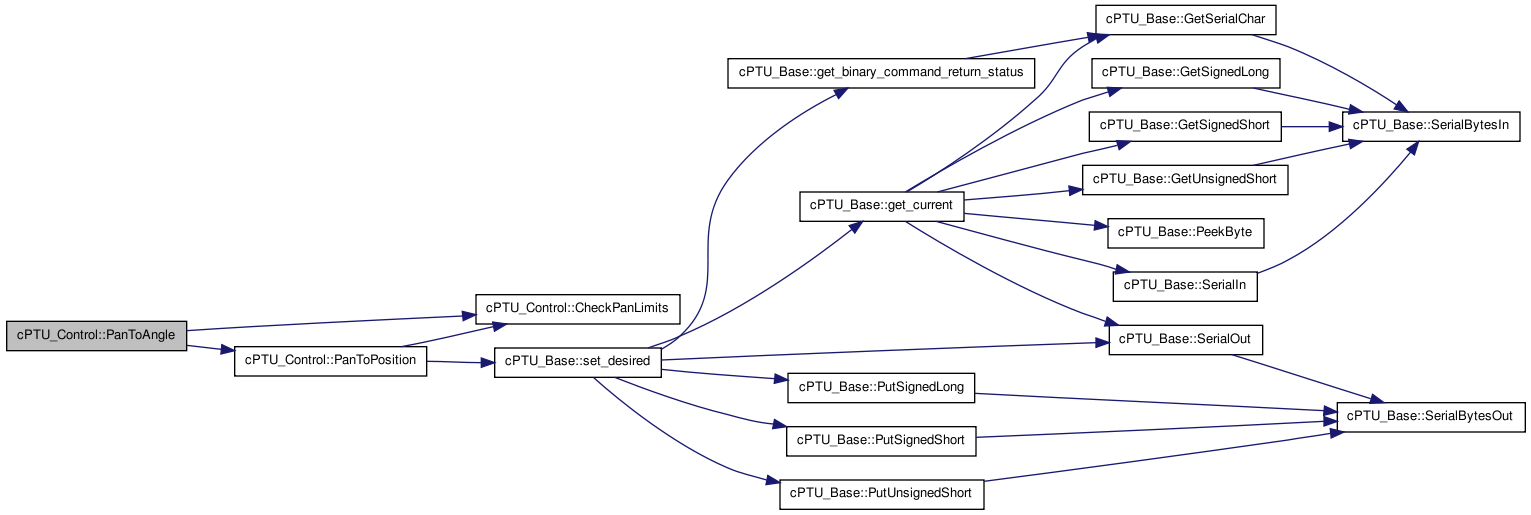
| int cPTU_Control::PanToPosition | ( | short int | Pos | ) | [inherited] |
Pans unit to Pos position. (updated).
- Parameters:
-
Pos to move to.
- Returns:
- Function result (0 is OK; -1 NOK)
References ABSOLUTE, cPTU_Control::CheckPanLimits(), PAN, POSITION, and cPTU_Base::set_desired().
Referenced by cPTU_Control::PanToAngle().

| char PeekByte | ( | portstream_fd | , | |
| unsigned char * | ||||
| ) |
| char PutSignedLong | ( | portstream_fd | , | |
| signed long * | ||||
| ) |
| char PutSignedShort | ( | portstream_fd | , | |
| signed short * | ||||
| ) |
| char PutUnsignedShort | ( | portstream_fd | , | |
| unsigned short * | ||||
| ) |
| char ReadSerialLine | ( | portstream_fd | , | |
| unsigned char * | , | |||
| long | , | |||
| int * | ||||
| ) |
| char SerialBytesIn | ( | portstream_fd | , | |
| unsigned char * | , | |||
| unsigned | int, | |||
| long | ||||
| ) |
| char SerialBytesOut | ( | portstream_fd | , | |
| unsigned char * | , | |||
| int | ||||
| ) |
| char SerialStringOut | ( | portstream_fd | , | |
| unsigned char * | ||||
| ) |
| char set_ISM_desired_abs_positions | ( | signed short int * | Ppos, | |
| signed short int * | Tpos | |||
| ) |
| int cPTU_Control::SetPanSpeed | ( | unsigned short int | Speed | ) | [inherited] |
Class methods used to set PTU motion parameters, position, speed and acceleration.
Sets pan speed (updated)
- Parameters:
-
Speed to set.
- Returns:
- Function result (0 is OK; -1 NOK)
References ABSOLUTE, cPTU_Control::CheckPanSLimits(), PAN, cPTU_Base::set_desired(), and SPEED.
| int cPTU_Control::SetPureVelocity | ( | signed short int | ps, | |
| signed short int | ts | |||
| ) | [inherited] |
Sets Pan and Tilt velocities. Pure velocity control must be enabled using SetPureVelocityControl(void).
- Parameters:
-
ps Pan velocity ts Tilt velocity
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Base::set_pure_velocities().

| int cPTU_Control::SetPureVelocity_DegperSec | ( | double | ps, | |
| double | ts | |||
| ) | [inherited] |
Sets Pan and Tilt velocities. Pure velocity control must be enabled using SetPureVelocityControl(void).
- Parameters:
-
ps Pan velocity ts Tilt velocity
- Returns:
- Function result (0 is OK; -1 NOK)
References _PANTILTRESOLUTION_, cPTU_Base::reset_PTU_parser(), ret, and cPTU_Base::set_pure_velocities().
Referenced by ptucontrol_command_handler().

| int cPTU_Control::SetTiltSpeed | ( | unsigned short int | Speed | ) | [inherited] |
Sets tilt speed (updated).
- Parameters:
-
Speed to set.
- Returns:
- Function result (0 is OK; -1 NOK)
References ABSOLUTE, cPTU_Control::CheckTiltSLimits(), cPTU_Base::set_desired(), SPEED, and TILT.
| int cPTU_Control::TiltOffsetToPosition | ( | int | Offset | ) | [inherited] |
Tilts unit to Offset from current position.
- Parameters:
-
Offset value to perform.
- Returns:
- Function result (0 is OK; -1 NOK)
| int cPTU_Control::TiltToAngle | ( | double | Angle | ) | [inherited] |
Tilts unit to angle Angle.
- Parameters:
-
Angle to move to.
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Control::TiltToPosition().
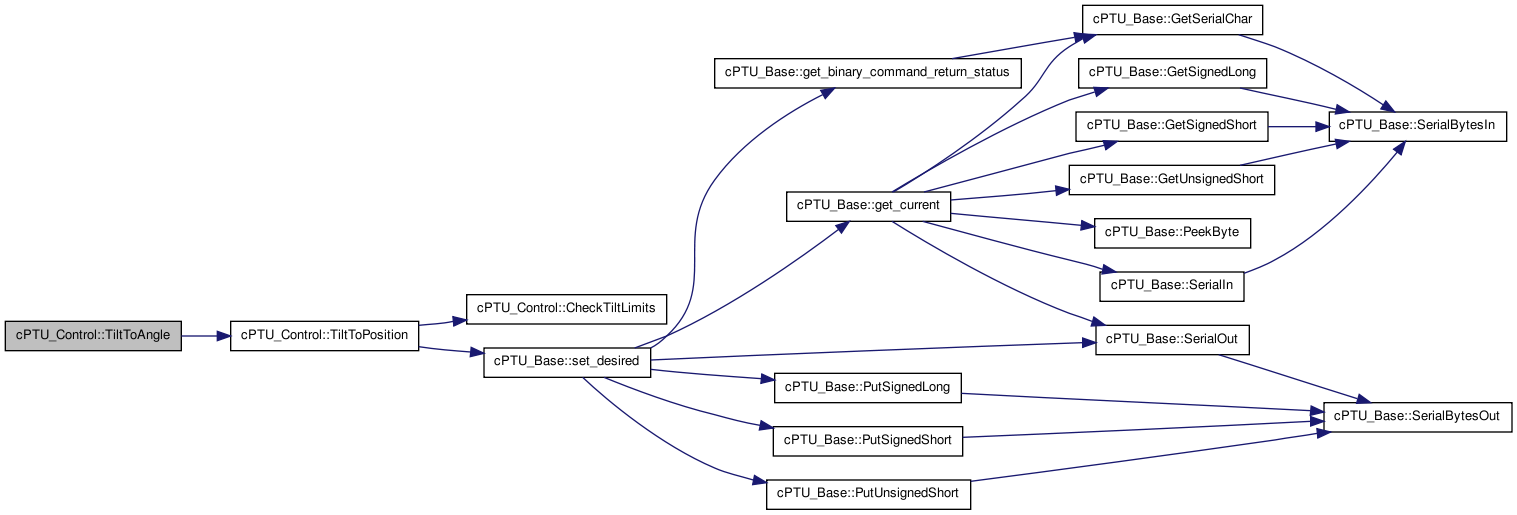
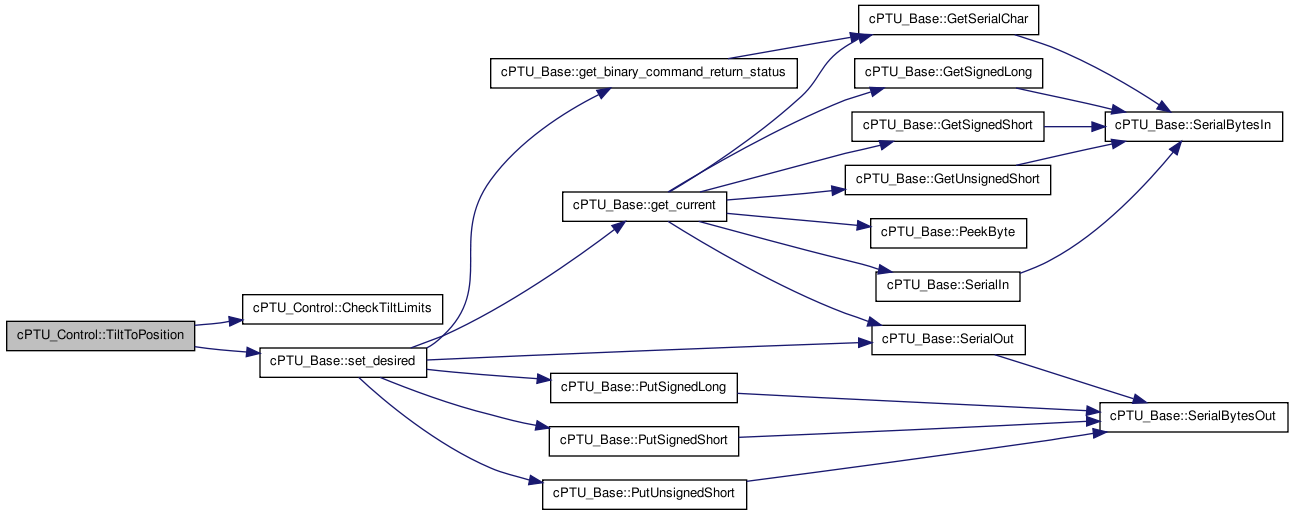
| int cPTU_Control::TiltToPosition | ( | short int | Pos | ) | [inherited] |
Tilts unit to Pos position. (updated).
- Parameters:
-
Pos to move to.
- Returns:
- Function result (0 is OK; -1 NOK)
References ABSOLUTE, cPTU_Control::CheckTiltLimits(), POSITION, cPTU_Base::set_desired(), and TILT.
Referenced by cPTU_Control::TiltToAngle().

Variable Documentation
char CHA_comm_active = FALSE [static] |
Referenced by cPTU_Base::talkto_CHA(), and cPTU_Base::talkto_PTUcontroller().
portstream_fd current_host_port [static] |
Referenced by cPTU_Base::close_host_port(), cPTU_Base::config_CHA(), cPTU_Base::config_CHA_38400(), cPTU_Base::execute_set_desired_velocities(), cPTU_Base::firmware_version(), cPTU_Base::firmware_version_OK(), cPTU_Base::get_current(), cPTU_Base::get_current_positions(), cPTU_Base::get_desired(), cPTU_Base::get_ISM_desired_abs_positions(), cPTU_Base::get_PTU_motion(), cPTU_Base::GetSerialChar(), cPTU_Base::open_host_port(), cPTU_Base::open_host_port_38400(), cPTU_Base::reset_PTU_parser(), cPTU_Base::select_host_port(), cPTU_Base::select_unit(), cPTU_Base::SerialIn(), cPTU_Base::SerialOut(), cPTU_Base::set_desired(), cPTU_Base::set_desired_abs_positions(), cPTU_Base::set_ISM_desired_abs_positions(), cPTU_Base::set_PTU_motion(), cPTU_Base::set_pure_velocities(), cPTU_Base::set_unit_id(), cPTU_Base::talkto_CHA(), cPTU_Base::talkto_PTUcontroller(), cPTU_Base::TriggerOn(), and cPTU_Base::TriggersPending().
| char err |
char speed_control_mode = PTU_INDEPENDENT_SPEED_CONTROL_MODE [static] |
Referenced by cPTU_Base::get_current(), cPTU_Base::get_desired(), cPTU_Base::set_desired(), and cPTU_Base::set_mode().
