cPTU_Control Class Reference
[Base_ptucontrol]
Driver for Directed Perception Pan and Tilt units (PTU), model PTUD46. More...
#include <ptu_control.h>


Public Member Functions | |
| cPTU_Control () | |
| Class constructor. Opens device and sets communication parameters. | |
| ~cPTU_Control () | |
| Class destructor. Closes device. | |
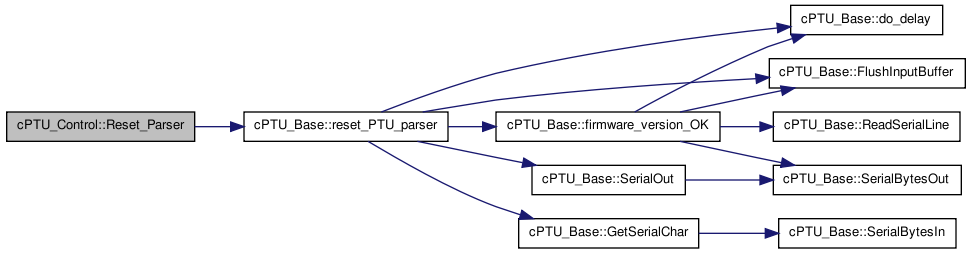
| char | Reset_Parser (long time) |
| int | OpenSerialPort (char *sn) |
| Class methods used to configure the serial port. | |
| int | OpenSerialPort (char *sn, int baud) |
| int | CloseSerialPort (void) |
| (updated) | |
| int | Reset (void) |
| Class methods used to configure PTU. | |
| int | SetAsciiEchoMode (char e) |
| Enables/Disables Echo mode. | |
| int | SetImmediatePositionExecution (void) |
| Orders PTU unit to immediatly pursue the last ordered position.(updated). | |
| int | SetSlaveModeExecution (void) |
| Orders P&T unit go to every position ordered, regardless of any updating orders.(updated). | |
| int | SetPureVelocityControl (void) |
| Enables Pure Velocity control. | |
| int | SetIndependentVelocityControl (void) |
| Enables Independent Velocity control. | |
| int | Halt (char halt_type) |
| Immediatly stops movement (updated). | |
| int | SetCheckLimits (unsigned char val) |
| Several miscelaneous class methods. | |
| void | Wait (int t) |
| Waits for t miliseconds of for PTU completion (updated). | |
| long | GetCurrentPanP (void) |
| Class methods used to get PTU current and desired position, speed and acceleration. | |
| double | GetCurrentPanPdeg (void) |
| Gets Current Pan Angle (updated). | |
| long | GetDesiredPanP (void) |
| Gets Desired Pan Position (updated). | |
| double | GetDesiredPanPdeg (void) |
| Gets Desired Pan angle (updated). | |
| long | GetCurrentTiltP (void) |
| Gets Current Tilt Position (updated). | |
| double | GetCurrentTiltPdeg (void) |
| Gets Current tilt Angle (updated). | |
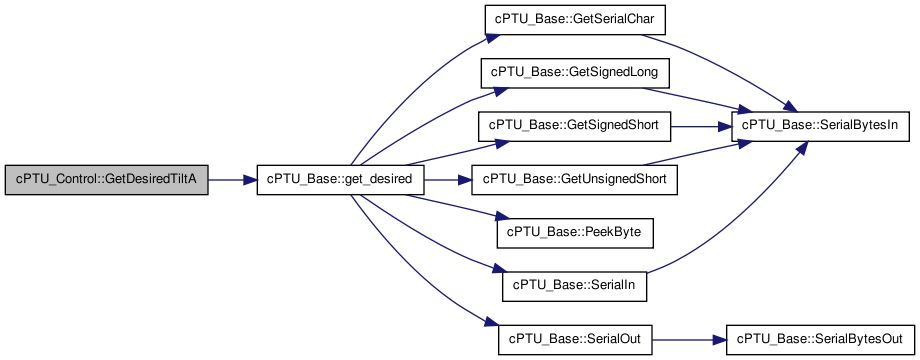
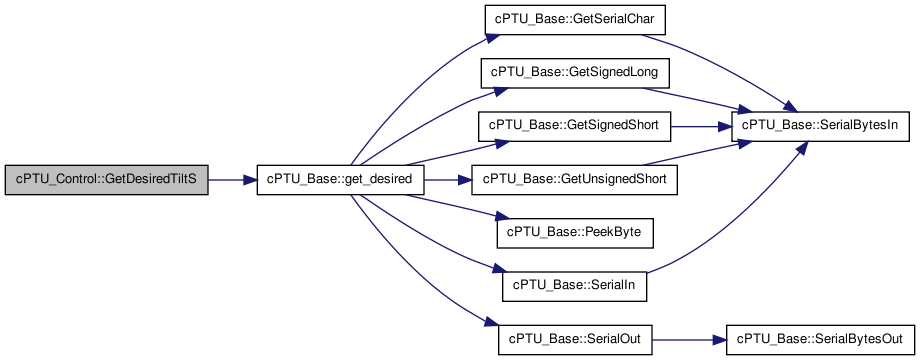
| long | GetDesiredTiltP (void) |
| Gets Desired Tilt Position (updated). | |
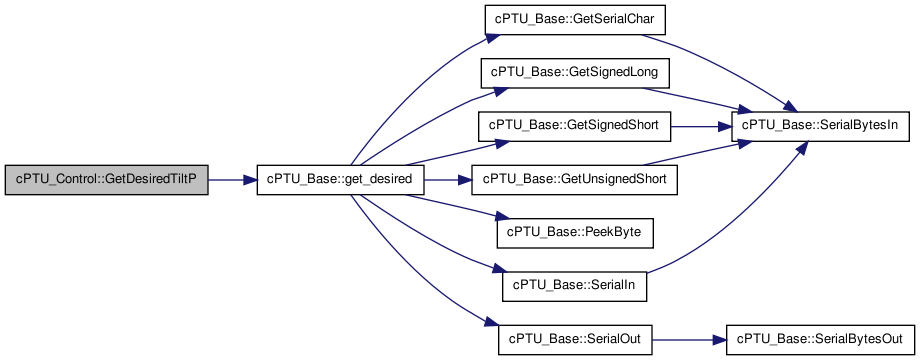
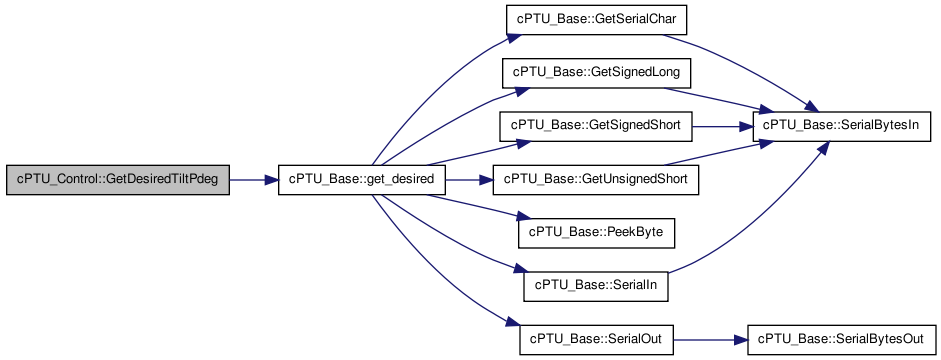
| double | GetDesiredTiltPdeg (void) |
| Gets Desired Tilt angle (updated). | |
| long | GetCurrentPanS (void) |
| Gets Current Pan Speed (updated). | |
| double | GetCurrentPanSdegsec (void) |
| Gets Current Pan Speed degrees per sec (updated). | |
| long | GetDesiredPanS (void) |
| Gets desired Pan Speed (updated). | |
| double | GetDesiredPanSdegsec (void) |
| Gets desired Pan Speed degsec(updated). | |
| long | GetCurrentTiltS (void) |
| Gets Current Tilt Speed (updated). | |
| double | GetCurrentTiltSdegsec (void) |
| Gets Current Pan Speed degrees per sec (updated). | |
| long | GetDesiredTiltS (void) |
| Gets Desired Tilt Speed (updated). | |
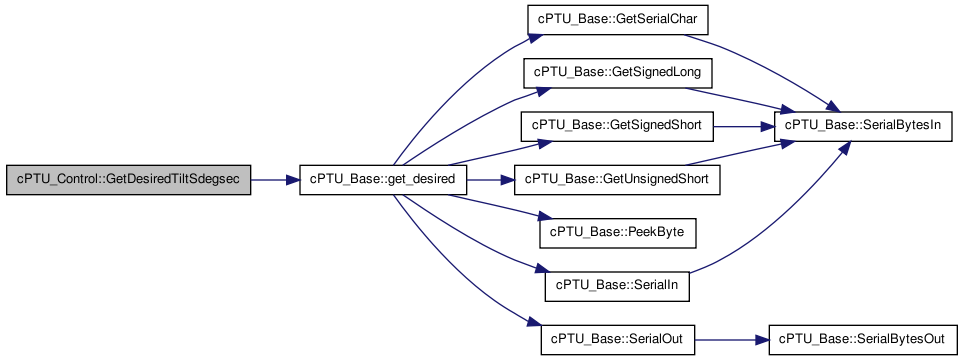
| double | GetDesiredTiltSdegsec (void) |
| Gets Desired Tilt Speed (updated). | |
| long | GetCurrentPanA (void) |
| Gets Current Pan Acceleration (updated). | |
| long | GetDesiredPanA (void) |
| Gets Desired Pan Acceleration (updated). | |
| long | GetCurrentTiltA (void) |
| Gets Current Tilt Acceleration (updated). | |
| long | GetDesiredTiltA (void) |
| Gets Desired Tilt Acceleration (updated). | |
| long | GetDesiredPanR (void) |
| Gets Desired Pan Resolution (updated). | |
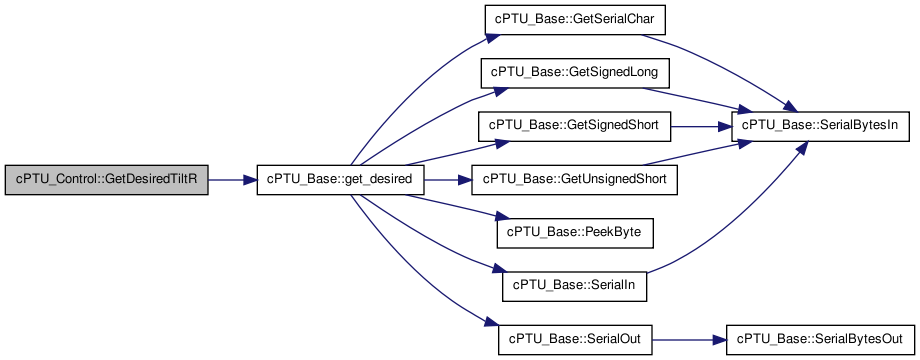
| long | GetDesiredTiltR (void) |
| Gets Desired Tilt Resolution (updated). | |
| int | SetPanSpeed (unsigned short int Speed) |
| Class methods used to set PTU motion parameters, position, speed and acceleration. | |
| int | SetTiltSpeed (unsigned short int Speed) |
| Sets tilt speed (updated). | |
| int | PanToPosition (short int Pos) |
| Pans unit to Pos position. (updated). | |
| int | PanToAngle (double Angle) |
| Pans unit to angle Angle. | |
| int | PanOffsetToPosition (int Offset) |
| Pans unit to Offset from current position. | |
| int | TiltToPosition (short int Pos) |
| Tilts unit to Pos position. (updated). | |
| int | TiltToAngle (double Angle) |
| Tilts unit to angle Angle. | |
| int | TiltOffsetToPosition (int Offset) |
| Tilts unit to Offset from current position. | |
| int | PanTiltPosSpeed (short int PanPos, short int TiltPos, unsigned short int PanSpeed, unsigned short int TiltSpeed) |
| Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. (updated). | |
| int | PanTiltAngleSpeed (double PanAngle, double TiltAngle, unsigned short int PanSpeed, unsigned short int TiltSpeed) |
| Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. Its the same has PanTiltPosSpeed but pos is given in degrees. | |
| int | PanTiltAngleSpeedAngleperSec (double PanAngle, double TiltAngle, double PanSpeed, double TiltSpeed) |
| Sends 4 motion orders to PTU. Pan ans Tilt position speed and halt flag. Its the same has PanTiltPosSpeed but pos is given in degrees. | |
| int | SetPureVelocity (signed short int ps, signed short int ts) |
| Sets Pan and Tilt velocities. Pure velocity control must be enabled using SetPureVelocityControl(void). | |
| int | SetPureVelocity_DegperSec (double ps, double ts) |
| Sets Pan and Tilt velocities. Pure velocity control must be enabled using SetPureVelocityControl(void). | |
Private Member Functions | |
| short int | CheckPanLimits (short int Pos, unsigned char checkflag) |
| Class methods used to check if pan, speed and acceleration values are within allowed values. | |
| short int | CheckTiltLimits (short int Pos, unsigned char checkflag) |
| Checks for tilt limits. | |
| unsigned short int | CheckPanSLimits (unsigned short int Sp, unsigned char checkflag) |
| Checks for pan speed limits. | |
| unsigned short int | CheckTiltSLimits (unsigned short int Sp, unsigned char checkflag) |
| Checks for tilt speed limits. | |
Private Attributes | |
| struct { | |
| char * ComPort | |
| portstream_fd ComPortHandle | |
| struct { | |
| char verbose:1 | |
| char CheckLimits:1 | |
| } flg | |
| struct { | |
| struct { | |
| int Max | |
| int Min | |
| } Pan | |
| struct { | |
| int Max | |
| int Min | |
| } PanS | |
| struct { | |
| int Max | |
| int Min | |
| } Tilt | |
| struct { | |
| int Max | |
| int Min | |
| } TiltS | |
| } Limits | |
| double Resolution | |
| } | Parameters |
Detailed Description
Driver for Directed Perception Pan and Tilt units (PTU), model PTUD46.
- Todo:
- implement set POWER_LEVEL functions
Constructor & Destructor Documentation
| cPTU_Control::cPTU_Control | ( | ) | [inline] |
Class constructor. Opens device and sets communication parameters.
- Returns:
References _PANTILTRESOLUTION_, and TRUE.
| cPTU_Control::~cPTU_Control | ( | ) | [inline] |
Class destructor. Closes device.
- Returns:
Member Function Documentation
| int cPTU_Control::CloseSerialPort | ( | void | ) | [inline] |
(updated)
- Parameters:
-
@return
References cPTU_Base::close_host_port().

| long cPTU_Control::GetCurrentPanA | ( | void | ) | [inline] |
Gets Current Pan Acceleration (updated).
- Returns:
- The current pan acceleration value
References ACCELERATION, cPTU_Base::get_current(), and PAN.
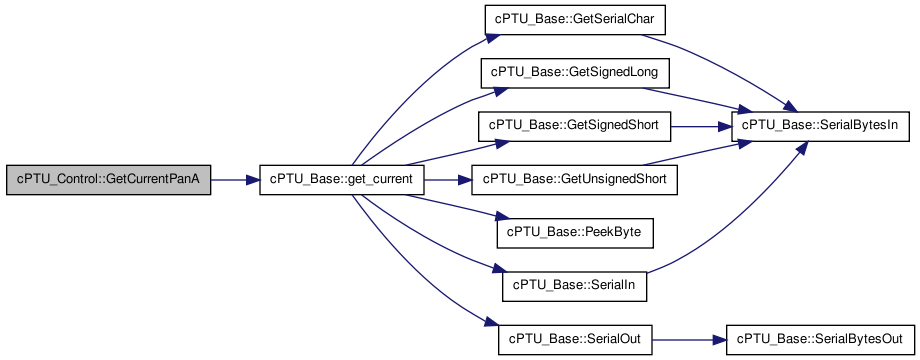
| long cPTU_Control::GetCurrentPanP | ( | void | ) | [inline] |
Class methods used to get PTU current and desired position, speed and acceleration.
Gets Current Pan Position (updated)
- Returns:
- The current Pan Position value
References cPTU_Base::get_current(), PAN, and POSITION.
Referenced by GetCurrentPanPdeg().

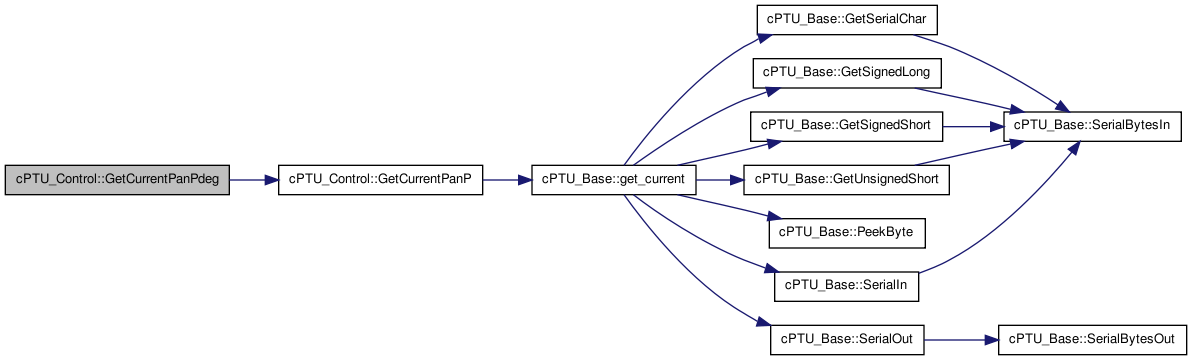
| double cPTU_Control::GetCurrentPanPdeg | ( | void | ) | [inline] |
Gets Current Pan Angle (updated).
- Returns:
- The current Pan Angle value
References _PANTILTRESOLUTION_, and GetCurrentPanP().
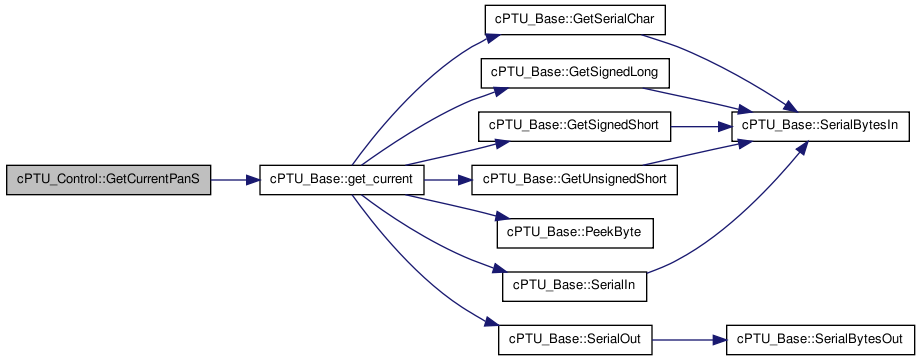
| long cPTU_Control::GetCurrentPanS | ( | void | ) | [inline] |
Gets Current Pan Speed (updated).
- Returns:
- The current pan speed value
References cPTU_Base::get_current(), PAN, and SPEED.
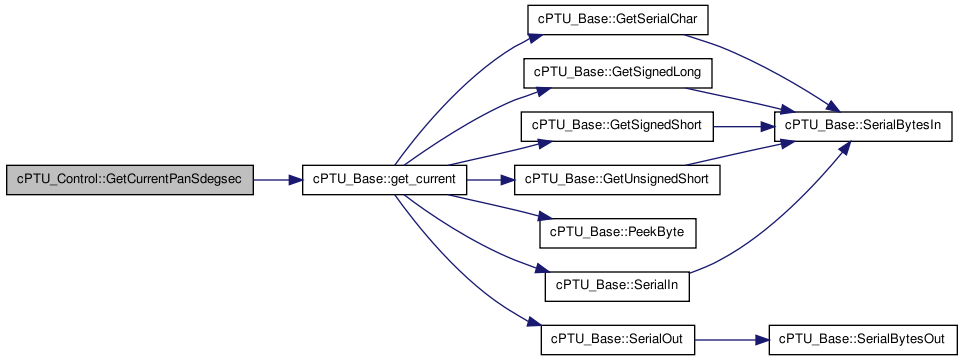
| double cPTU_Control::GetCurrentPanSdegsec | ( | void | ) | [inline] |
Gets Current Pan Speed degrees per sec (updated).
- Returns:
- The current pan speed value
References _PANTILTRESOLUTION_, cPTU_Base::get_current(), PAN, and SPEED.
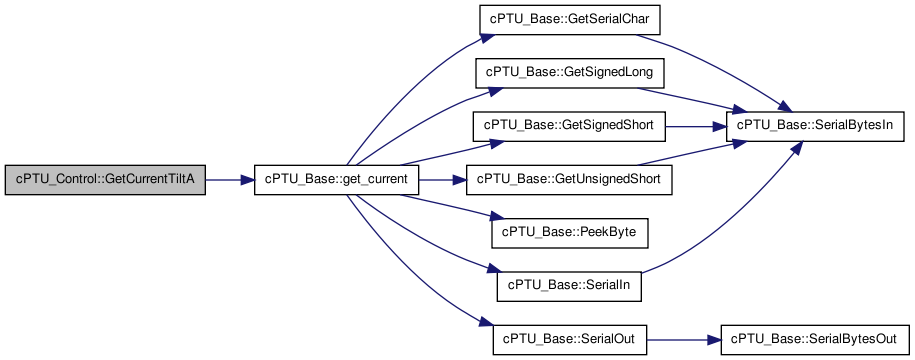
| long cPTU_Control::GetCurrentTiltA | ( | void | ) | [inline] |
Gets Current Tilt Acceleration (updated).
- Returns:
- The current tilt acceleration value
References ACCELERATION, cPTU_Base::get_current(), and TILT.
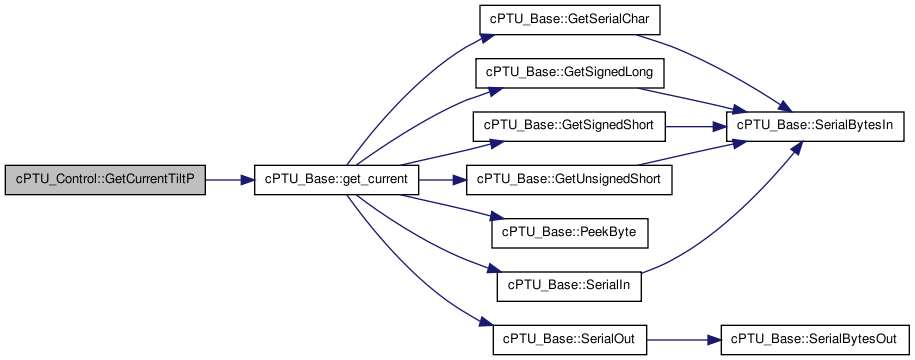
| long cPTU_Control::GetCurrentTiltP | ( | void | ) | [inline] |
Gets Current Tilt Position (updated).
- Returns:
- The current Tilt Position value
References cPTU_Base::get_current(), POSITION, and TILT.
Referenced by GetCurrentTiltPdeg().

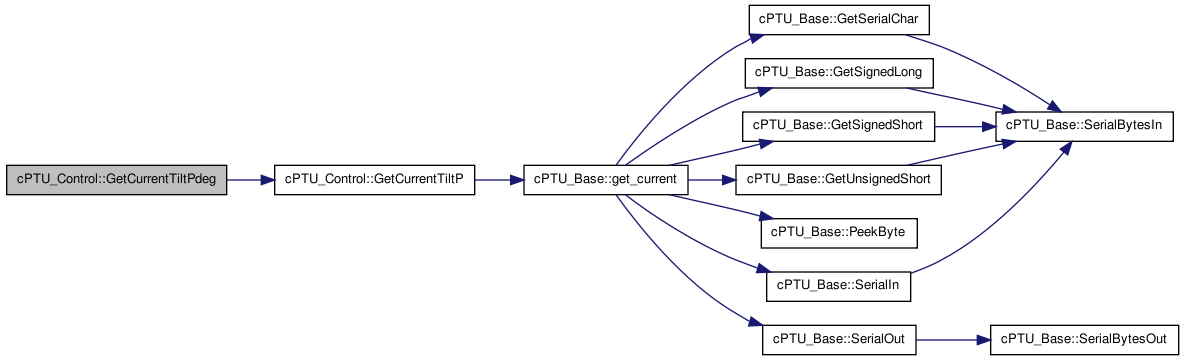
| double cPTU_Control::GetCurrentTiltPdeg | ( | void | ) | [inline] |
Gets Current tilt Angle (updated).
- Returns:
- The current Tilt Angle value
References _PANTILTRESOLUTION_, and GetCurrentTiltP().
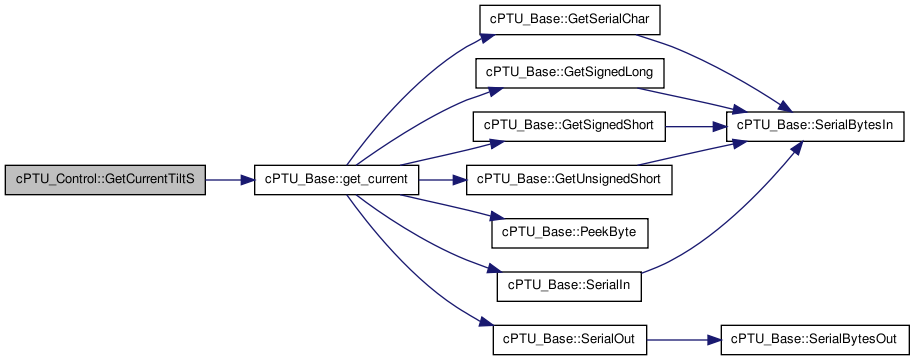
| long cPTU_Control::GetCurrentTiltS | ( | void | ) | [inline] |
Gets Current Tilt Speed (updated).
- Returns:
- The current tilt speed value
References cPTU_Base::get_current(), SPEED, and TILT.
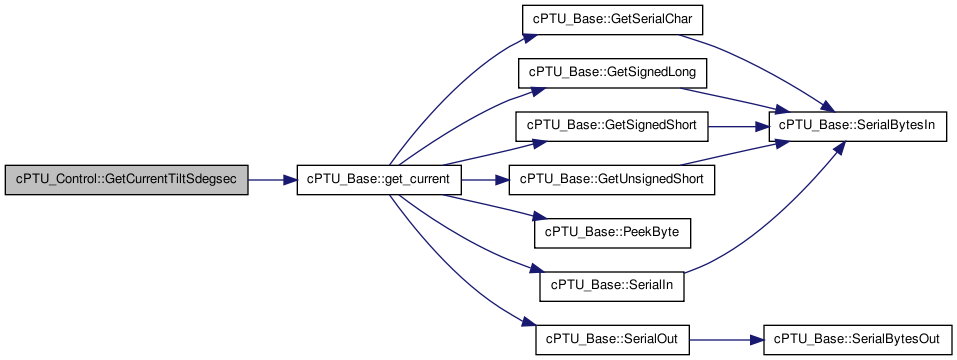
| double cPTU_Control::GetCurrentTiltSdegsec | ( | void | ) | [inline] |
Gets Current Pan Speed degrees per sec (updated).
- Returns:
- The current pan speed value
References _PANTILTRESOLUTION_, cPTU_Base::get_current(), SPEED, and TILT.
| long cPTU_Control::GetDesiredPanA | ( | void | ) | [inline] |
Gets Desired Pan Acceleration (updated).
- Returns:
- The desired pan accelaration value
References ACCELERATION, cPTU_Base::get_desired(), and PAN.
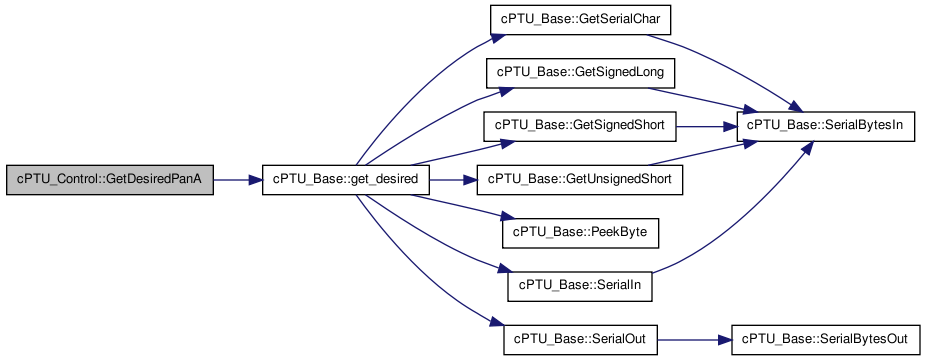
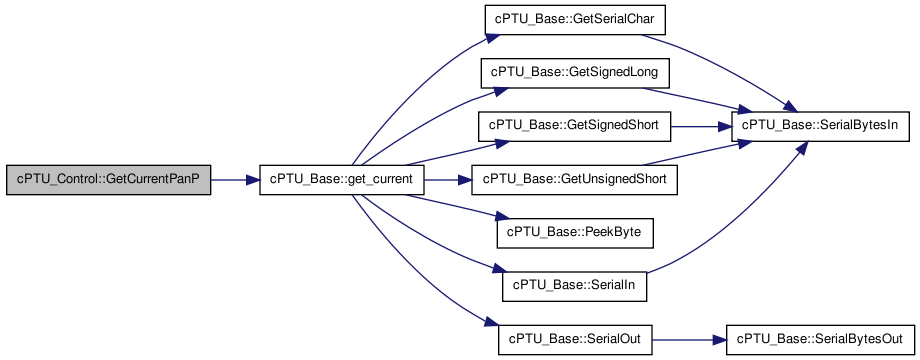
| long cPTU_Control::GetDesiredPanP | ( | void | ) | [inline] |
Gets Desired Pan Position (updated).
- Returns:
- The Desired Pan Position value
References cPTU_Base::get_desired(), PAN, and POSITION.
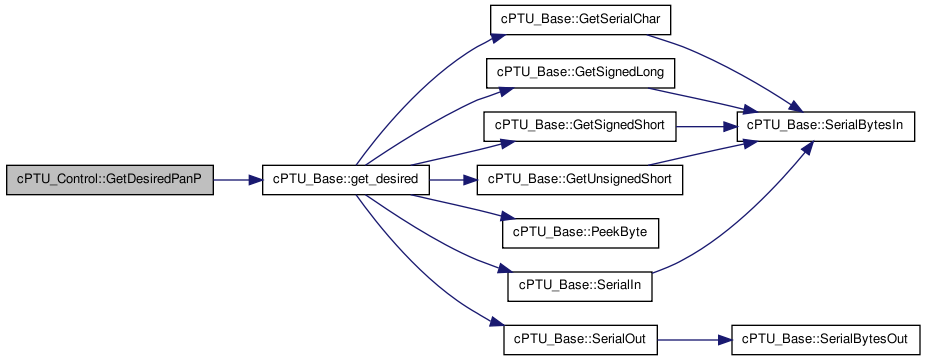
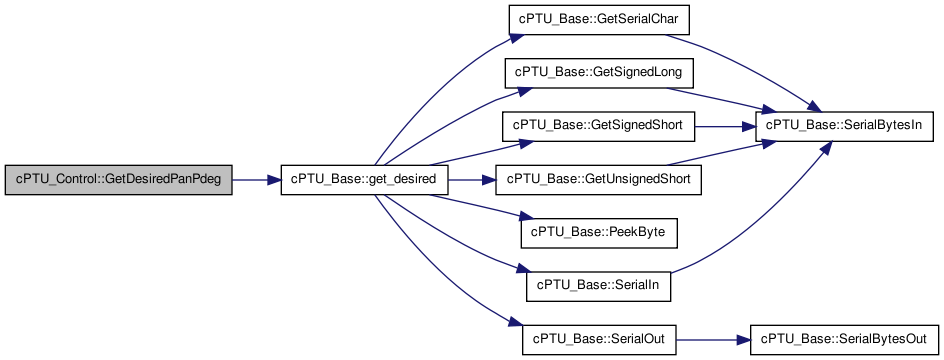
| double cPTU_Control::GetDesiredPanPdeg | ( | void | ) | [inline] |
Gets Desired Pan angle (updated).
- Returns:
- The Desired Pan Position angle
References _PANTILTRESOLUTION_, cPTU_Base::get_desired(), PAN, and POSITION.
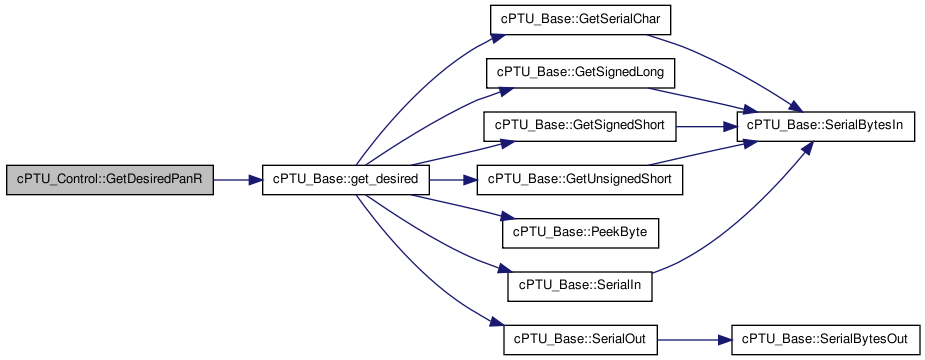
| long cPTU_Control::GetDesiredPanR | ( | void | ) | [inline] |
Gets Desired Pan Resolution (updated).
- Returns:
- The desired pan resolution value
References cPTU_Base::get_desired(), PAN, and RESOLUTION.
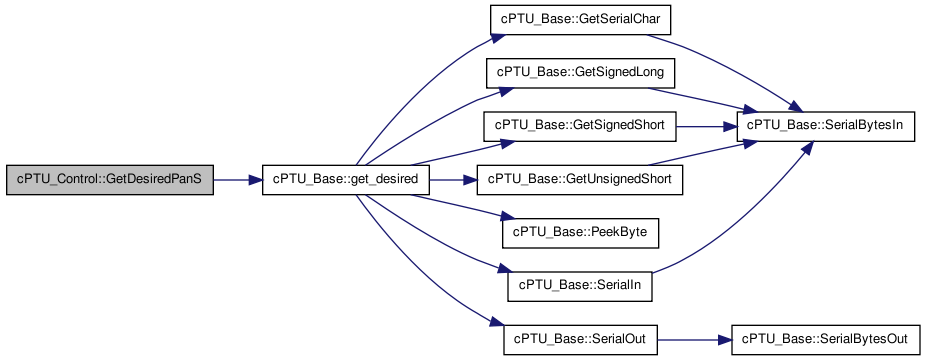
| long cPTU_Control::GetDesiredPanS | ( | void | ) | [inline] |
Gets desired Pan Speed (updated).
- Returns:
- The desired pan speed value
References cPTU_Base::get_desired(), PAN, and SPEED.
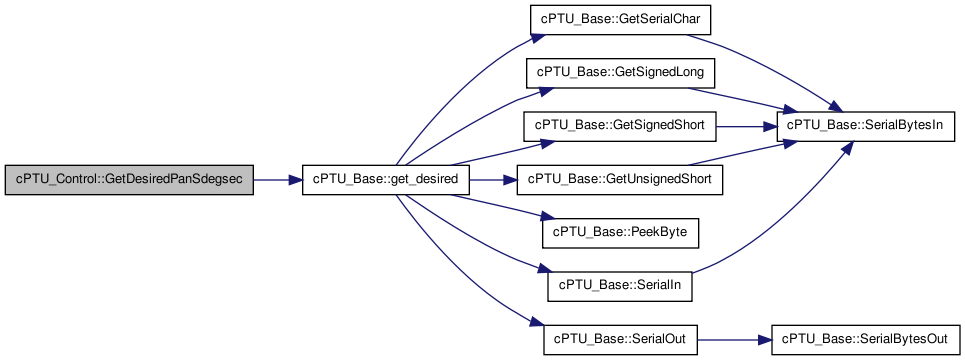
| double cPTU_Control::GetDesiredPanSdegsec | ( | void | ) | [inline] |
Gets desired Pan Speed degsec(updated).
- Returns:
- The desired pan speed value in degs/sec
References _PANTILTRESOLUTION_, cPTU_Base::get_desired(), PAN, and SPEED.
| long cPTU_Control::GetDesiredTiltA | ( | void | ) | [inline] |
Gets Desired Tilt Acceleration (updated).
- Returns:
- The desired tilt acceleration value
References ACCELERATION, cPTU_Base::get_desired(), and TILT.
| long cPTU_Control::GetDesiredTiltP | ( | void | ) | [inline] |
Gets Desired Tilt Position (updated).
- Returns:
- The Desired Tilt Position value
References cPTU_Base::get_desired(), POSITION, and TILT.
| double cPTU_Control::GetDesiredTiltPdeg | ( | void | ) | [inline] |
Gets Desired Tilt angle (updated).
- Returns:
- The Desired Tilt Position angle
References _PANTILTRESOLUTION_, cPTU_Base::get_desired(), POSITION, and TILT.
| long cPTU_Control::GetDesiredTiltR | ( | void | ) | [inline] |
Gets Desired Tilt Resolution (updated).
- Returns:
- The desired tilt resolution value
References cPTU_Base::get_desired(), RESOLUTION, and TILT.
| long cPTU_Control::GetDesiredTiltS | ( | void | ) | [inline] |
Gets Desired Tilt Speed (updated).
- Returns:
- The desired tilt speed value
References cPTU_Base::get_desired(), SPEED, and TILT.
| double cPTU_Control::GetDesiredTiltSdegsec | ( | void | ) | [inline] |
Gets Desired Tilt Speed (updated).
- Returns:
- The desired tilt speed value in degs/sec
References _PANTILTRESOLUTION_, cPTU_Base::get_desired(), SPEED, and TILT.
| int cPTU_Control::Halt | ( | char | halt_type | ) | [inline] |
Immediatly stops movement (updated).
- Parameters:
-
halt_type Can be one of the three:
- PAN halts pan axis
- TILT halts tilt axis
- ALL halts both pan and tilt
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Base::halt().

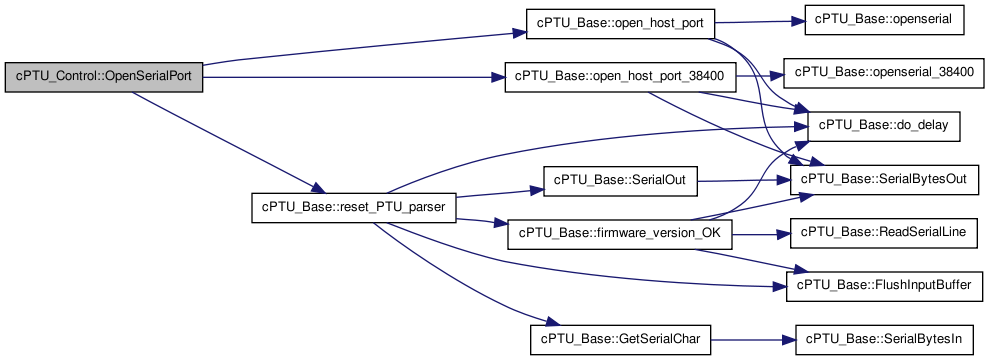
| int cPTU_Control::OpenSerialPort | ( | char * | sn, | |
| int | baud | |||
| ) | [inline] |
References cPTU_Base::open_host_port(), cPTU_Base::open_host_port_38400(), PORT_NOT_OPENED, and cPTU_Base::reset_PTU_parser().
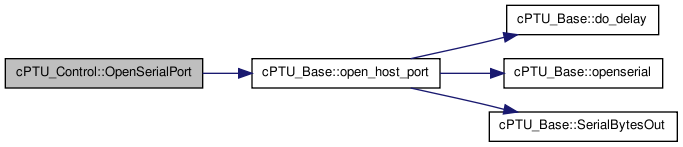
| int cPTU_Control::OpenSerialPort | ( | char * | sn | ) | [inline] |
Class methods used to configure the serial port.
Opens serial port defined by sn (updated).
- Parameters:
-
sn Usually, in linux, serial port is /dev/ttyUSB0 (for USB connections) or /dev/ttyS0 (for serial connections)
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Base::open_host_port().
| int cPTU_Control::Reset | ( | void | ) | [inline] |
Class methods used to configure PTU.
Resets pan and tilt unit. (updated).
- Returns:
- Function result (0 is OK; -1 NOK)
References cPTU_Base::reset_ptu().

| char cPTU_Control::Reset_Parser | ( | long | time | ) | [inline] |
| int cPTU_Control::SetAsciiEchoMode | ( | char | e | ) | [inline] |
Enables/Disables Echo mode.
- Parameters:
-
e if TRUE, echo mode is enabled. If FALSE, echo mode is disabled
- Returns:
- Function result (0 is OK; -1 NOK)
References COMMAND_EXECUTION_MODE, OFF_MODE, ON_MODE, and cPTU_Base::set_mode().

| int cPTU_Control::SetCheckLimits | ( | unsigned char | val | ) | [inline] |
Several miscelaneous class methods.
Orders class to check for PTU limits before sending the orders.
If enabled, the inserted values are saturated to max or min values if necessary. By default, the class checks PTU limits before sending the orders.
- Parameters:
-
val TRUE to check or FALSE not to check.
- Returns:
- Function result (0 is OK; -1 NOK)
| int cPTU_Control::SetImmediatePositionExecution | ( | void | ) | [inline] |
Orders PTU unit to immediatly pursue the last ordered position.(updated).
- Returns:
- Function result (0 is OK; -1 NOK)
References COMMAND_EXECUTION_MODE, EXECUTE_IMMEDIATELY, and cPTU_Base::set_mode().

| int cPTU_Control::SetIndependentVelocityControl | ( | void | ) | [inline] |
Enables Independent Velocity control.
- Returns:
- Function result (0 is OK; -1 NOK)
References PTU_INDEPENDENT_SPEED_CONTROL_MODE, cPTU_Base::set_mode(), and SPEED_CONTROL_MODE.
Referenced by ptucontrol_command_handler().


| int cPTU_Control::SetPureVelocityControl | ( | void | ) | [inline] |
Enables Pure Velocity control.
- Returns:
- Function result (0 is OK; -1 NOK)
References PTU_PURE_VELOCITY_SPEED_CONTROL_MODE, cPTU_Base::set_mode(), and SPEED_CONTROL_MODE.
Referenced by ptucontrol_command_handler().


| int cPTU_Control::SetSlaveModeExecution | ( | void | ) | [inline] |
Orders P&T unit go to every position ordered, regardless of any updating orders.(updated).
- Returns:
- Function result (0 is OK; -1 NOK)
References COMMAND_EXECUTION_MODE, EXECUTE_UPON_IMMEDIATE_OR_AWAIT, and cPTU_Base::set_mode().

| void cPTU_Control::Wait | ( | int | t | ) | [inline] |
Waits for t miliseconds of for PTU completion (updated).
Waits for t miliseconds.
- If t>=0, the function waits for t miliseconds.
- If t<=0, the function waits for PTU to finish the commands being executed.
One can use define FORPTUTOSTOP as an argument of Wait if we want to wait for PTU completion
- Parameters:
-
t number of miliseconds to wait.
- Returns:
- void
References cPTU_Base::await_completion(), and cPTU_Base::do_delay().

Field Documentation
| char* cPTU_Control::ComPort |
| struct { ... } cPTU_Control::flg |
| struct { ... } cPTU_Control::Limits |
| struct { ... } cPTU_Control::Pan |
| struct { ... } cPTU_Control::PanS |
struct { ... } cPTU_Control::Parameters [private] |
| double cPTU_Control::Resolution |
| struct { ... } cPTU_Control::Tilt |
| struct { ... } cPTU_Control::TiltS |
The documentation for this class was generated from the following files:
- bases/ptucontrol/base_ptucontrol/ptu_control.h
- bases/ptucontrol/base_ptucontrol/group_limits.cpp
- bases/ptucontrol/base_ptucontrol/group_motion.cpp
