t_object_list Struct Reference
[Planar Obstacles Traking with Kalman Filter, Potkf_tese]
** More...
#include <common.h>
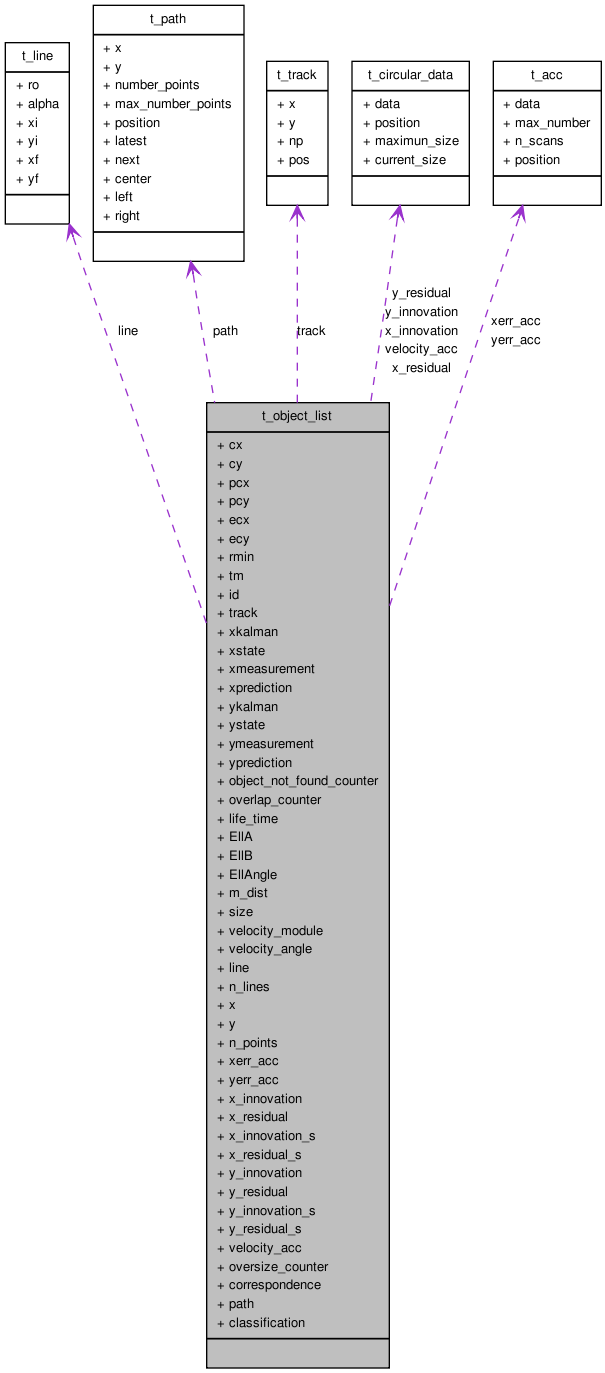
Collaboration diagram for t_object_list:
Data Fields | |
| double | cx |
| double | cy |
| double | pcx |
| double | pcy |
| double | ecx |
| double | ecy |
| double | rmin |
| double | tm |
| int | id |
| t_track | track |
| CvKalman * | xkalman |
| CvMat * | xstate |
| CvMat * | xmeasurement |
| const CvMat * | xprediction |
| CvKalman * | ykalman |
| CvMat * | ystate |
| CvMat * | ymeasurement |
| const CvMat * | yprediction |
| int | object_not_found_counter |
| int | overlap_counter |
| int | life_time |
| double | EllA |
| double | EllB |
| double | EllAngle |
| double | m_dist |
| double | size |
| double | velocity_module |
| double | velocity_angle |
| t_line ** | line |
| int | n_lines |
| double | x [50] |
| double | y [50] |
| double | n_points |
| t_acc | xerr_acc |
| t_acc | yerr_acc |
| t_circular_data * | x_innovation |
| t_circular_data * | x_residual |
| double | x_innovation_s |
| double | x_residual_s |
| t_circular_data * | y_innovation |
| t_circular_data * | y_residual |
| double | y_innovation_s |
| double | y_residual_s |
| t_circular_data * | velocity_acc |
| int | oversize_counter |
| int | correspondence |
| t_path | path |
| enum_classification | classification |
Detailed Description
**
Full descrition of and tracked object.
Field Documentation
| double t_object_list::cx |
| double t_object_list::cy |
| double t_object_list::ecx |
| double t_object_list::ecy |
| double t_object_list::EllA |
| double t_object_list::EllAngle |
| double t_object_list::EllB |
Referenced by copie_lines_to_list().
| double t_object_list::m_dist |
| double t_object_list::n_points |
Referenced by copie_lines_to_list().
| double t_object_list::pcx |
| double t_object_list::pcy |
| double t_object_list::rmin |
| double t_object_list::size |
| double t_object_list::tm |
| double t_object_list::x[50] |
Referenced by copie_lines_to_list().
X coordinate
| double t_object_list::x_residual_s |
Referenced by add_to_err_acc().
| CvKalman * t_object_list::xkalman |
| CvMat * t_object_list::xmeasurement |
| const CvMat * t_object_list::xprediction |
| CvMat * t_object_list::xstate |
| double t_object_list::y[50] |
Referenced by copie_lines_to_list().
Y coordinate
| double t_object_list::y_residual_s |
Referenced by add_to_err_acc().
| CvKalman * t_object_list::ykalman |
| CvMat * t_object_list::ymeasurement |
| const CvMat * t_object_list::yprediction |
| CvMat * t_object_list::ystate |
The documentation for this struct was generated from the following files:
- perception/planarobstacles/potkf/potkf_common.h
- perception/planarobstacles/potkf_tese/common.h
